2. Registration
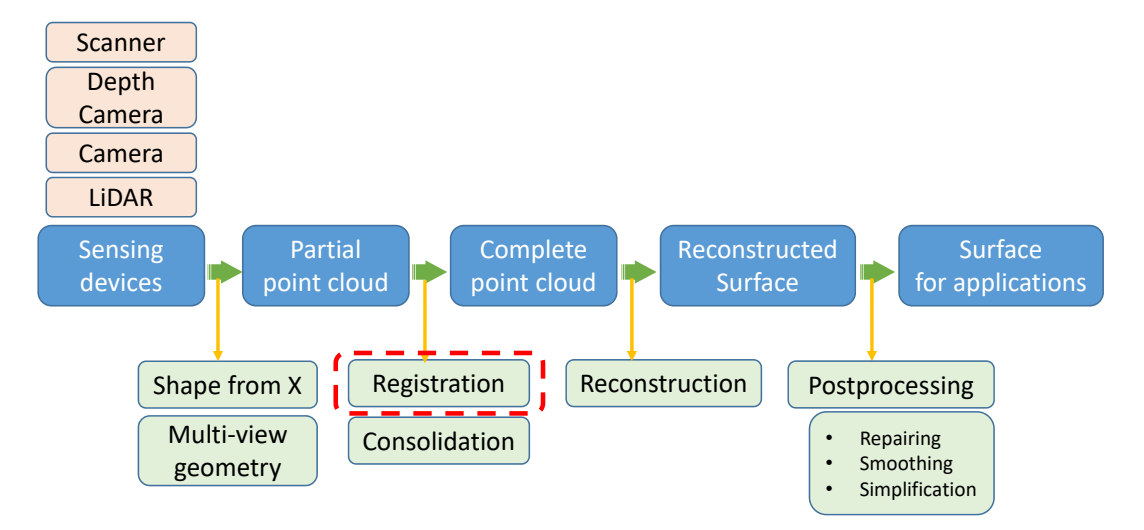
要解决的问题:Reconstruction from scans
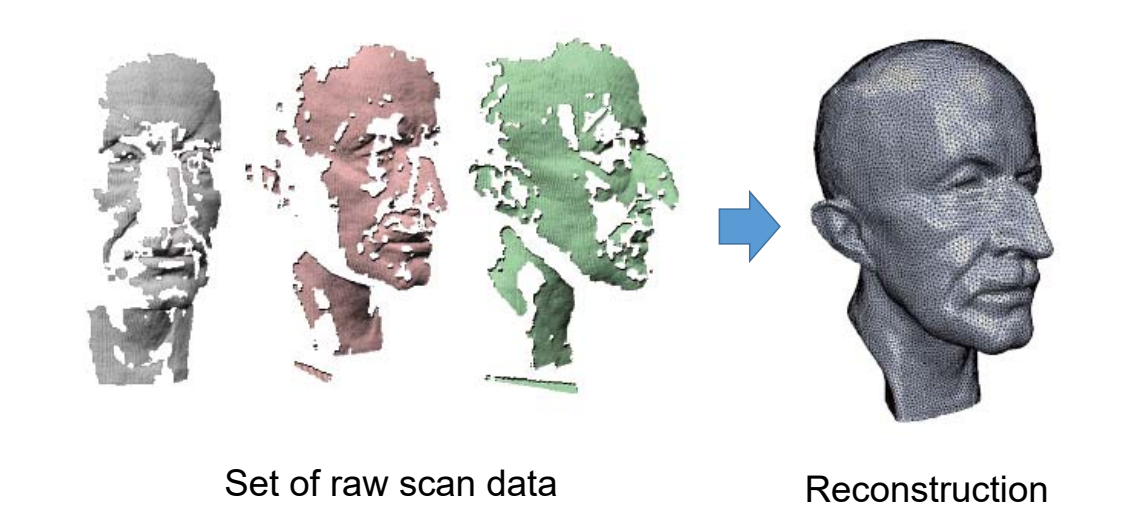
多个视点的扫描,每个视点得到分片3D数据,如何将这些分片数据合并成一个整体数据?
各个角度采集到的特体是碎片的,怎么拼起来?
Planing 怎么扫不同角度得到完整数据
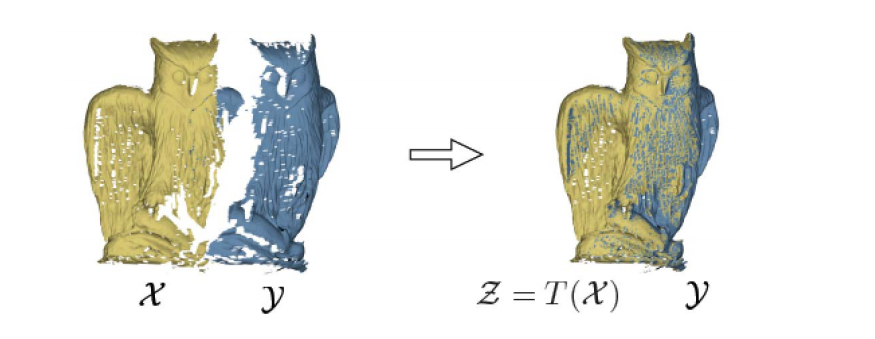
Pairwise Registration
目标:
Align a source model \(\chi\) onto a target model \(y\),find a transformation T \(\chi\) that brings \(\chi\) into alignment with \(y\)
挑战:
- How do we measure the quality of the alignment?
- What transformations are acceptable?
基本方法:Registration as energy minimization-
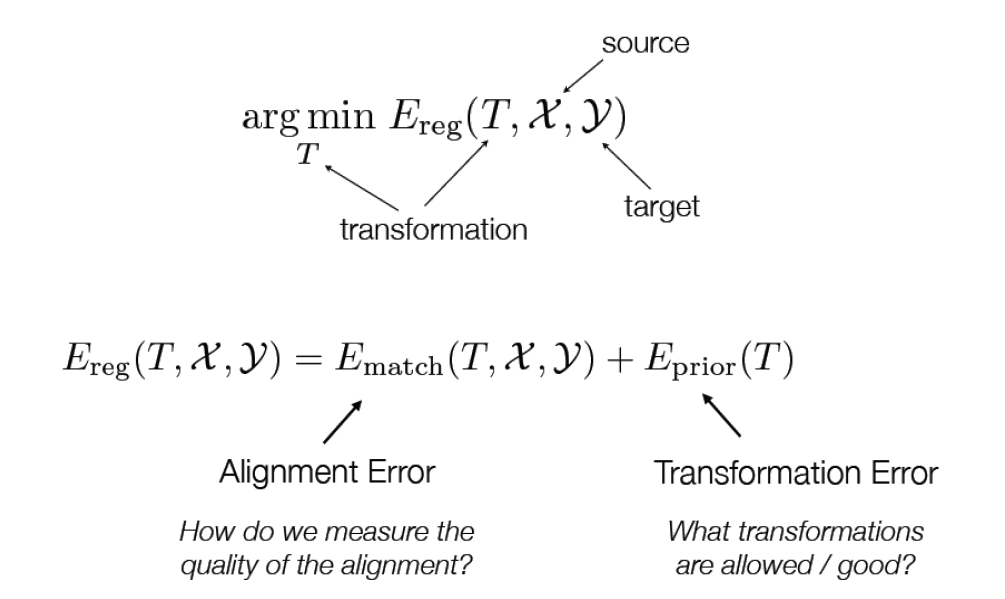
energy包含两部分:Alignment Error和Transformation Error,分别对应解决上面的两个挑战。
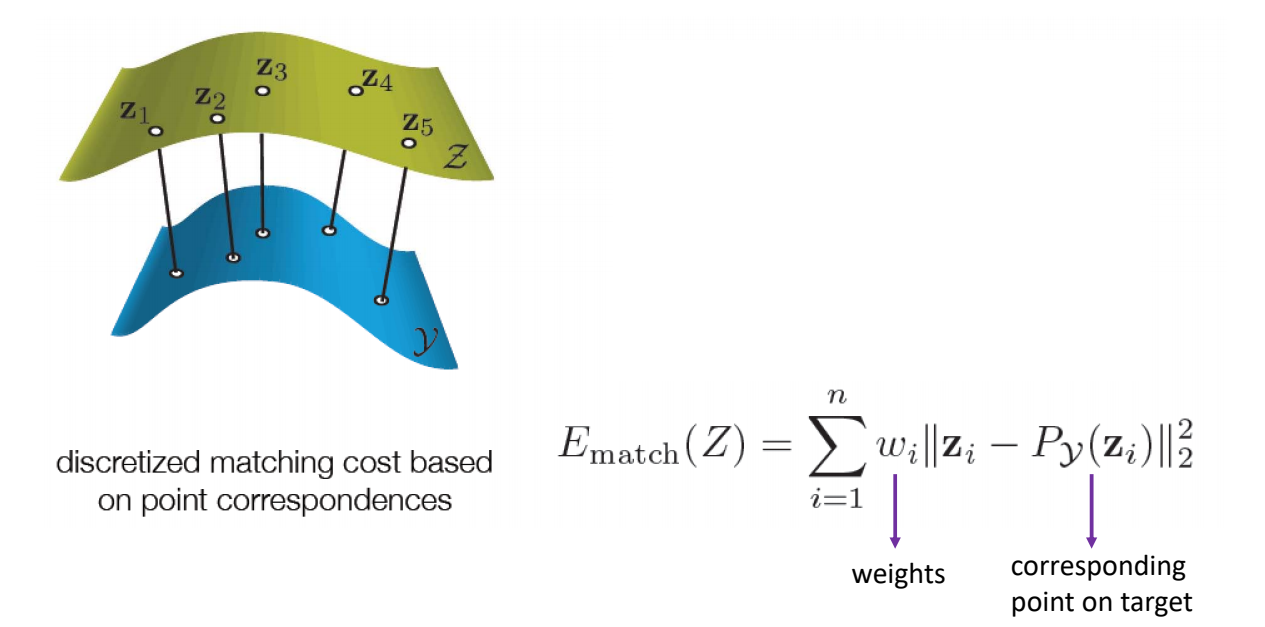
[46:21] Ematchi :匹配误差, Eprior:先验知识
Alignment Error

Prior Error – 1 (Rigid objects)
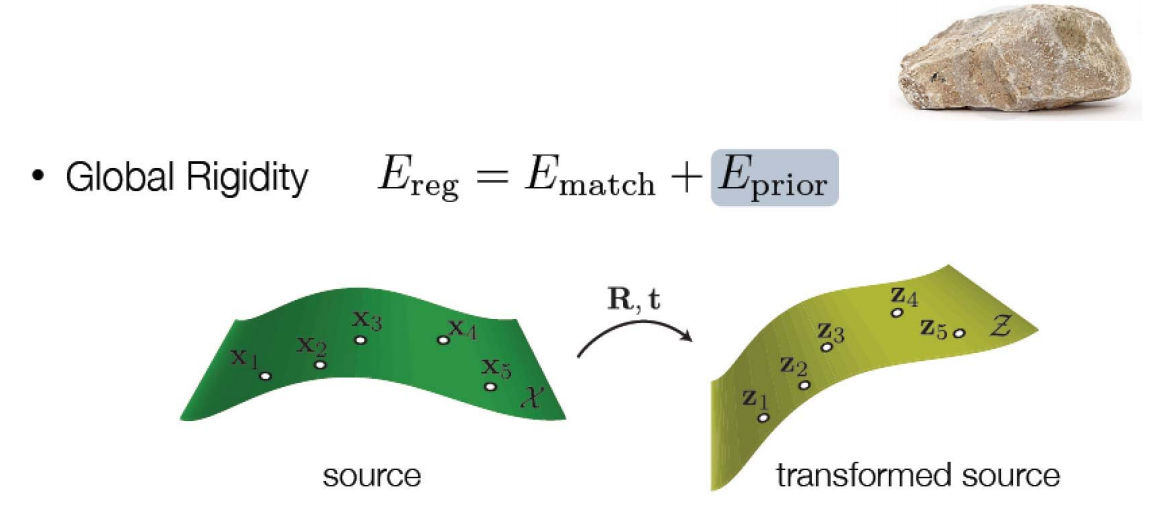
$$ E_{prior}(\mathbf{Z,R,t})=\sum_{i=1}^{n} ||\mathbf{Z}_i-(\mathbf{RX}_i+\mathbf{t})||^2_2 $$
Prior Error – 2 (Elastic objects)
弹性物体,存在少量变形
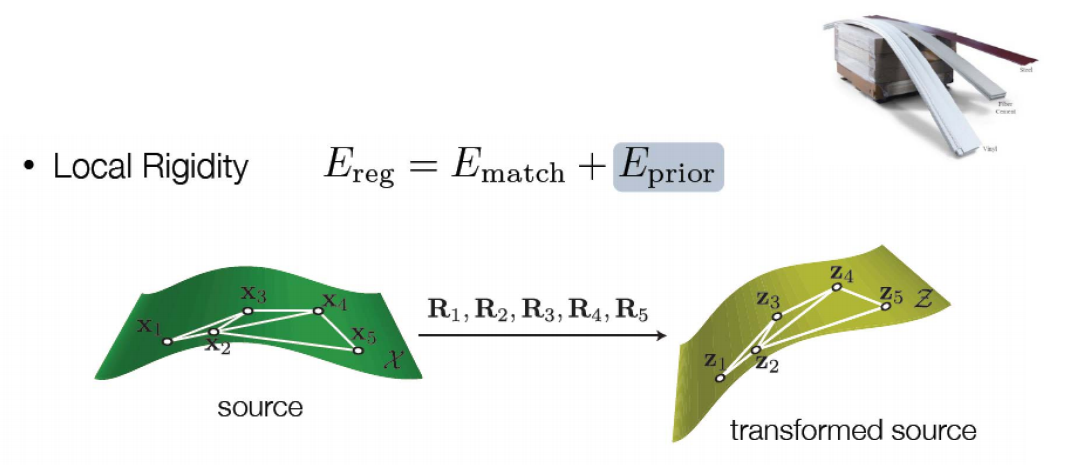
$$ E_{prior}(\mathbf{Z},(R_i))=\sum_{i=1}^{n} \sum_{j\in \mathcal{N}_{i}}||(\mathbf{Z}_j-\mathbf{Z}_i)-R_i(\mathbf{X}_j-\mathbf{X}_i)||^2_2 $$
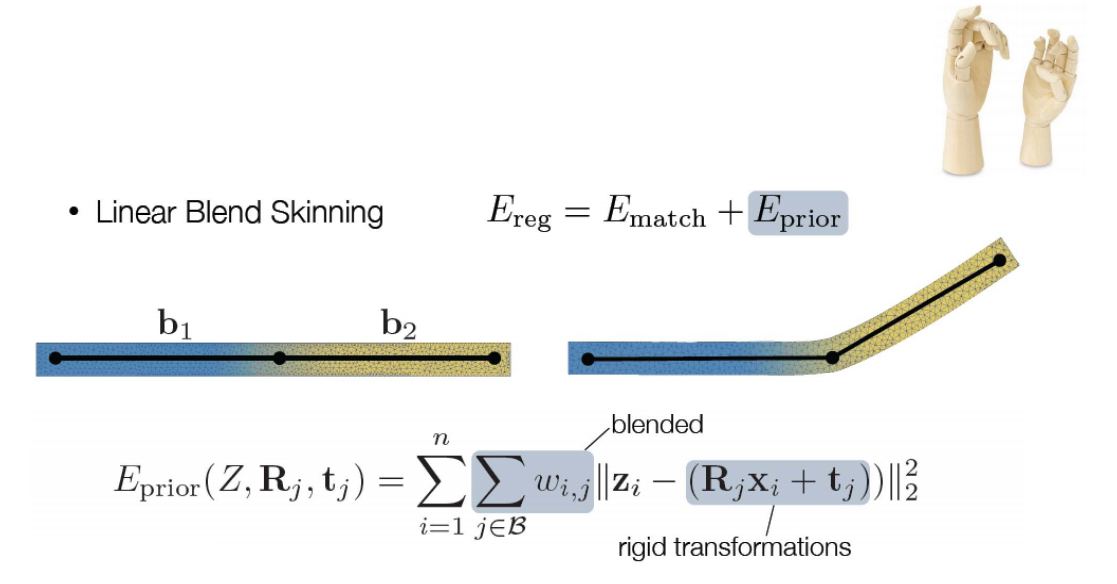
Prior Error – 3 (Articulated objects)
分段刚性
Iterative Closest Point (ICP) Algorithm
[Besl+92]
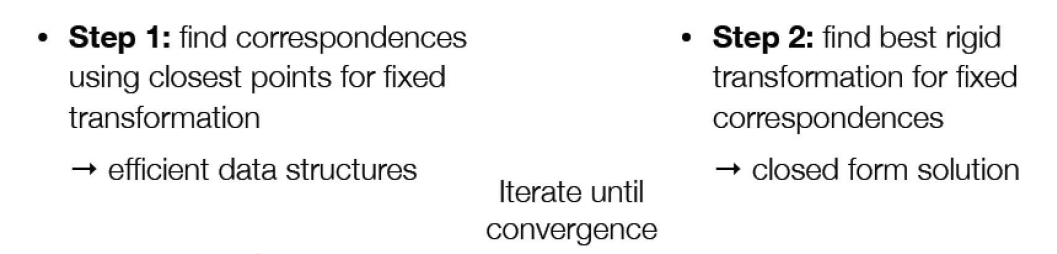
根据对应点求变换关系(R.t)
根据变换关系就对应点
本文出自CaterpillarStudyGroup,转载请注明出处。 https://caterpillarstudygroup.github.io/GAMES102_mdbook/