向量值函数
定义
🔎 [24:41]
函数的\(x\)称为变量,\(y\)称为值。如果函数的值是一个高维空间的点,或者说y是一个向量,则称为向量值函数。
x和y又分别称为自变量和应变量,因此向量值函数是多个应变量的函数。
\(m\) 维向量值函数可以看作最是\(m\)个相互无关的普通函数
拟合方法
看成多个单变量函数,各个函数独立无关,一般会用同样的基函数(共享基函数)
$$ \begin{cases} y_1=f_1(x)\\ \vdots \\ y_m=f_m(x) \end{cases} $$
✅ f1, f2, ..., fm是基于同一基函数但具有不同系数的函数。
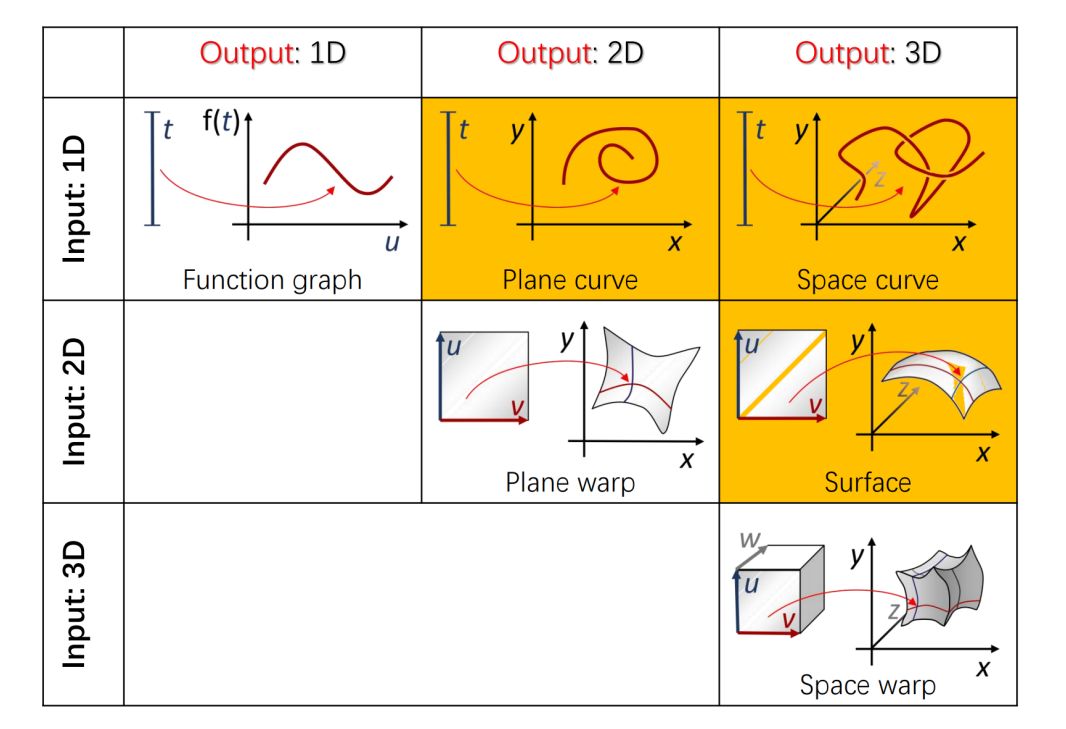
向量值函数举例
平面/空间参数曲线
单变量
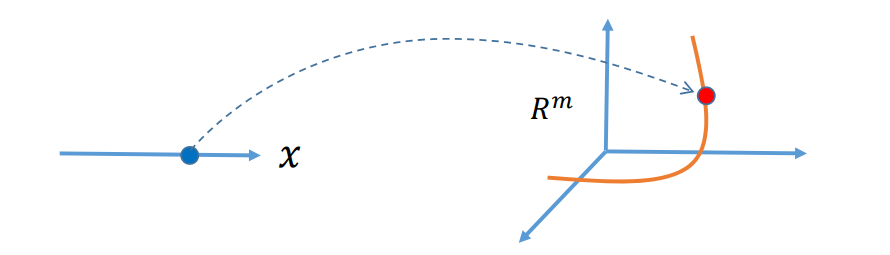
$$ f:R^1 → R^m $$
$$ x →\begin{pmatrix}y_1 \\\vdots \\y_m \end{pmatrix} $$
几何解释:一个实数\(𝑥∈𝑅^1\)映射到𝑚维空\(𝑅^m\)的一个点,轨迹构成\(𝑅^m\)的一条“曲线” ,但本质维度为1
🔎 [26:37]图
曲线的嵌入空间是高维,本质维度为1 把\(x\)的取值范围归一化到 [0,1],那么任意一个\(x\)值对应[0,1]上的一个点。 \(x 从 0 走到 1,y\)在高维空间中画出一条弧线。
特例:平面参数曲线
$$ f:R^1 → R^2 $$
$$ \begin{cases} x=x(t)\\ y=y(t) \end{cases} $$
$$ t\in [0,1] $$
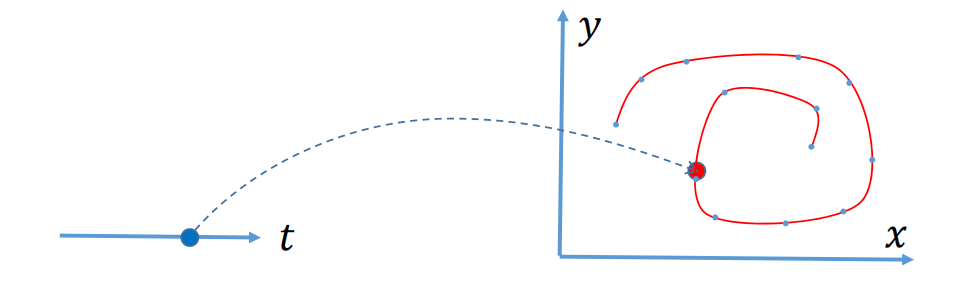
在这一页中, \(t 是变量,(x,y)\)是值
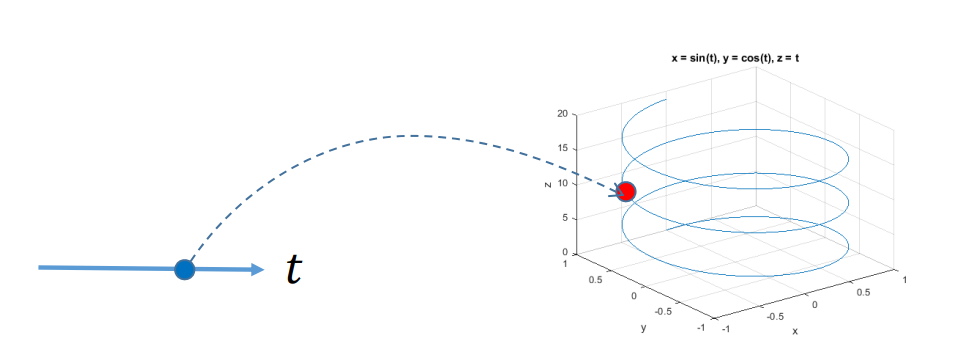
特例:空间参数曲线
$$ f:R^1 → R^3 $$
$$ \begin{cases} x=x(t) \\ y=y(t) \\ z=z(t) \end{cases} $$
$$ t\in [0,1] $$
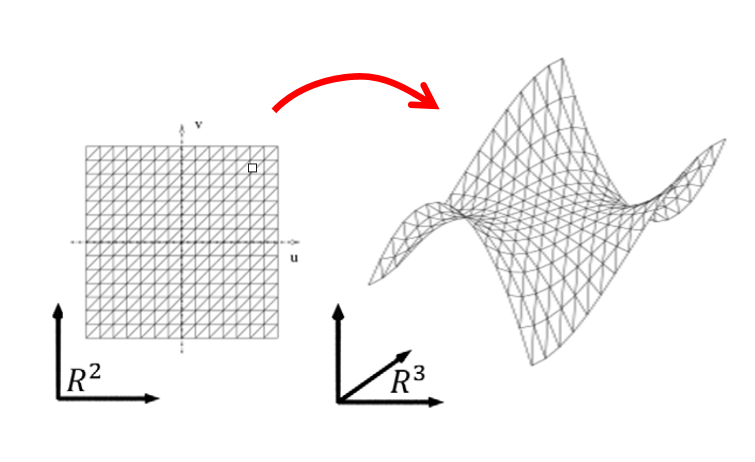
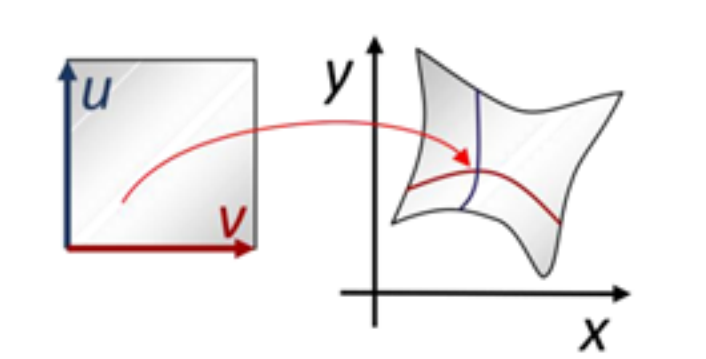
参数曲面
$$ f:R^2 → R^3 $$
$$ \begin{cases} x=x(u,v) \\ y=y(u,v) \\ z=z(u,v) \end{cases} $$
$$ (u,v)\in [0,1]\times [0,1] $$
几何解释:
• 一张曲面由两个参数\((u,v)\)决定,也称为双参数曲面
• 可灵活表达非函数型的任意曲面
流形:任意一个点的无穷小区域,等价于二维平面的圆盘
[32:28] 三维流形曲面,本质上是二维。
二维映射
$$ f:R^2 → R^2 $$
$$ \begin{cases} x=x(u,v) \\ y=y(u,v) \end{cases} $$
$$ (u,v)\in [0,1]\times [0,1] $$
几何解释:二维区域之间的映射,可看成特殊的曲面(第三个维度始终为\(0\))
应用:图像变形(warping)
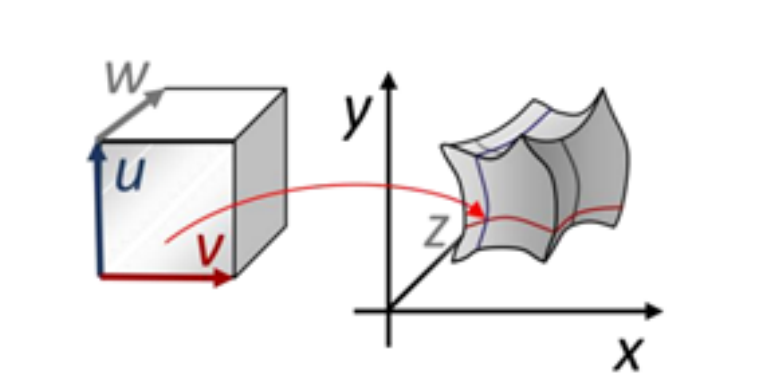
三维映射
$$ f:R^3 → R^3 $$
$$ \begin{cases} x=x(u,v,w)\\ y=y(u,v,w) \\ z=z(u,v,w) \end{cases} $$
$$ (u,v,w)\in [0,1]^3 $$
几何解释:三维体区域之间的映射
应用:体形变、体参数化、有限元
降维映射(低维投影)
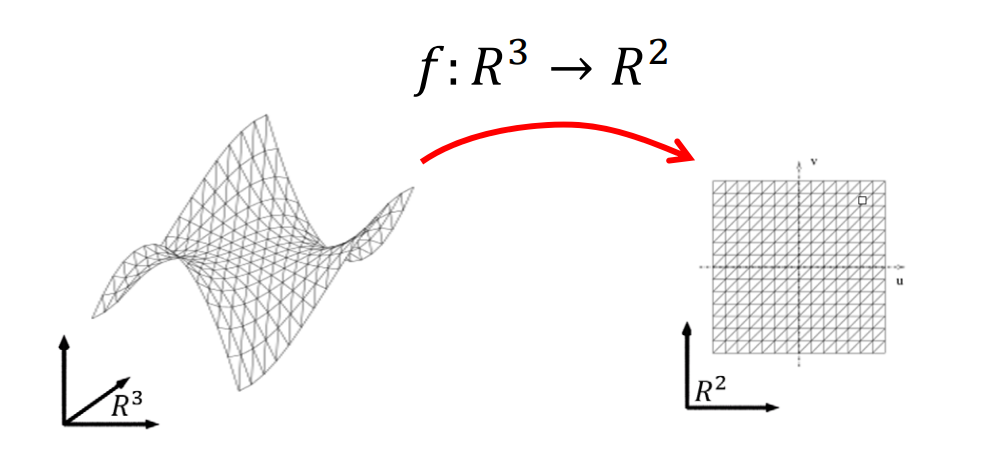
降维映射一般有信息丢失,丢失的信息大部分情况下不可逆,即无法恢复
高维到低维,如果多个点映射到一个点,就会发生信息丢失,不可恢复。
💡 我的思考
信息丢失不定是坏事,有可能本身就是一个点,由于躁声的原因表现为多个点,也有可能是次要信息,不希望提取出来。
一般映射
$$ f:R^n → R^m $$
- \(n<m\)
为低维到高维的映射(高维的超曲面,\(n\)维流形曲面),本征维度为\(n\) - \(n>m\)
为降维映射,一般信息有损失
(1)如果\(𝑅^n\)中的点集刚好位于一个\(𝑚\)维(或小于\(𝑚\))的流形上,则映射可能是无损的,即可以被恢复的
(2)如果值维度低于变量的本质维度,则必定不可恢复。
[42:00] 其中黄色为参数学习曲面
本文出自CaterpillarStudyGroup,转载请注明出处。 https://caterpillarstudygroup.github.io/GAMES102_mdbook/