P22
投影动力学 (Projective Dynamics)
原理
PD VS. 弹簧系统
PD由基于隐式积分弹簧系统演化而来,其基本流程是一致的。
---
title: Projective Dynamics
---
flowchart LR
Current(["当前状态"])
Constrain[("约束")]
Outter[("外力")]
Energy(["势能能量"])
Mometen(["动能能量"])
Target(["优化目标"])
Velocity(["速度"])
Next(["下一时刻状态"])
NextWoContrain(["不考虑约束的下一时刻状态"])
Outter --> Velocity
Velocity & Current --> NextWoContrain --> Mometen
Constrain-->Energy
Energy & Mometen --> Target --> Optimize --> Next
PD 与弹簧系统的区别在于,弹簧系统与PD计算能量的方式不同。弹簧系统使用弹簧的弹性势能计算能量,而PD使用约束计算能量。能量定义的不同也导致了解优化问题的方法不同。
PD VS. PBD
✅ PBD方法直接拿约束来修复顶点位置,没有物理含义。而Projective Dynatics把projection方法跟物拟模拟结合起来。
✅ Projective Dynamics与PBD的差别主要体现在用约束来做什么。
Projective Dynamics将约束转化为能量,通过最小化能量函数来求解系统的状态。因此是一种基于优化的物理仿真方法
优化目标
用隐式积分做弹簧系统,最终会转化为优化问题:
$$ \Psi(\mathbf{x}) = \frac{1}{2∆t^2}||\mathbf{x} −\mathbf{y}||_\mathbf{M}^2+E(\mathbf{x} ) $$
其中y为显式积分的结果,E(x)为系统的势能。
目标是优化\(\Psi\):
$$ x = \argmin \Psi(x) $$
在弹簧系统中,这样定义E(x)
$$ E(x) = \sum _ {e=(i,j)}E _ e= \frac{1}{2} k\sum _ {e=(i,j)} (||\mathbf{x} _ {i} − \mathbf{x} _ {j} ||−L _ e)^2 $$
势能能量E(x)
1根弹簧,2个顶点
引入变量p为长度为\(L_e\)的向量:
$$ p = \overrightarrow {\mathbf{x} _ {i}'\mathbf{x} _ {j}'} $$
$$ \begin{aligned} E(x) &= \frac{1}{2} k(||\mathbf{x} _ {i} −\mathbf{x} _ {j} ||−L _ e)^2 \\ &= \min \frac{1}{2} k(||(\mathbf{x} _ {i} − \mathbf{x} _ {j}) - (\mathbf{x} _{i}' −\mathbf{x} _ {j}') ||)^2\\ &= \min \frac{1}{2} k(||(\mathbf{x} _ {i} −\mathbf{x} _ {j}) - p ||)^2 \end{aligned} $$
可以解得:
$$ p = \argmin E(x) = L\frac{x _ i-x _ j}{||x _ i-x _ j||} $$
代入p得:
$$ \begin{aligned} E(x) &= \frac{1}{2} k(||(\mathbf{x} _ {i} −\mathbf{x} _ {j}) - p ||)^2 \\ &= \frac{1}{2} k ( || \underbrace{\begin{bmatrix} I & -I \end{bmatrix}} _ {3 \times 6} \underbrace{\begin{bmatrix} x _ i \\ x _ j \end{bmatrix}} _ {6 \times 1} - \underbrace{p} _ {3\times 1}||^2) \end{aligned} $$
根据牛顿法,需要根据E(x)的一阶导和二阶导来计算x的更新方向:
$$ \begin{aligned} \nabla E &= k \begin{bmatrix} I \\ -I \end{bmatrix} (\begin{bmatrix} I & -I \end{bmatrix} \begin{bmatrix} x_i \\ x_ j \end{bmatrix} - p) && \nabla E \in R^{6\times1}\\ H &= k \begin{bmatrix} I \\ -I \end{bmatrix} \begin{bmatrix} I & -I \end{bmatrix} = k \begin{bmatrix} I & -I \\ -I & I \end{bmatrix} && H \in R^{6\times6} \end{aligned} $$
n根弹簧,m个顶点
引入变量p,其中\(p_ e\)为长度为\(L_ e\)的向量:
$$ p_{e=(i,j)} = \overrightarrow {\mathbf{x} _ {i}'\mathbf{x} _ {j}'} $$
$$ \begin{aligned} E(x) &= \frac{1}{2} k \sum _ {e=(i,j)}(||\mathbf{x} _ {i} −\mathbf{x} _ {j} ||−L _ e)^2 \\ &= \min \frac{1}{2} k\sum _ {e=(i,j)}(||(\mathbf{x} _ {i} −\mathbf{x} _ {j}) - (\mathbf{x} _ {i}' −\mathbf{x} _ {j}') ||)^2\ &= \min \frac{1}{2} k\sum _ {e=(i,j)}(||(\mathbf{x} _ {i} −\mathbf{x} _ {j}) - p_ e ||)^2 \end{aligned} $$
可以解得:
$$ p _ e = \argmin E _ {e=(i,j)}(x) = L\frac{x _ i-x _ j}{||x _ i-x _ j||} $$
代入p得:
$$ \begin{aligned} E(x) &= \frac{1}{2} k\sum _ {e=(i,j)}(||(\mathbf{x} _ {i} −\mathbf{x}_{j}) - p _ e ||)^2 \\ &= \frac{1}{2} k ( || \underbrace{A} _ {3n \times 3m} \underbrace{\mathbf{x}} _ {3m \times 1} - \underbrace{P} _ {3n\times 1}||^2) \end{aligned} $$
其中,A是由弹簧连接关系构成的矩阵,只要弹簧结构不发生变化,整个仿真过程中A保持炒变。
根据牛顿法,需要根据 \(E(x)\) 的一阶导和二阶导来计算 \(x\) 的更新方向:
$$ \begin{aligned} \nabla E &= k A^T (A \mathbf{x} - P) && \nabla E \in R^{3m\times1}\\ H &= k A^TA && H \in R^{3m\times3m} \end{aligned} $$
说明
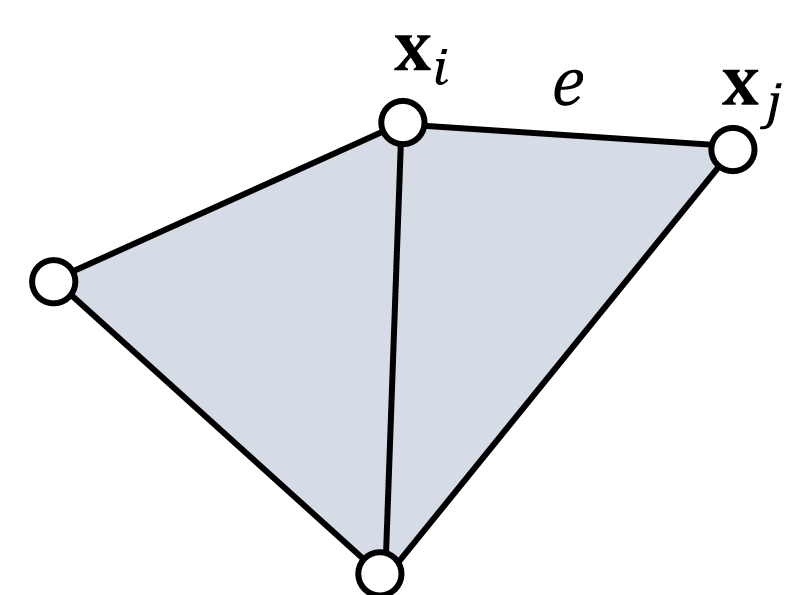
引入的变化p是形变后的e的投影
$$ (\mathbf{x} _ {e,i}^{\mathrm{new} },\mathbf{x} _ {e,j}^{\mathrm{new} }) = \mathrm{Projection} _ e(\mathbf{x} _ i,\mathbf{x} _ j) $$
✅ 本文基于约束定义能量。{\(\mathbf{x} _{e,i}^{\mathrm{new} },\mathbf{x} _ {e,j}^{\mathrm{new} }\)}为期望的顶点位置\(P\)。不直接把顶点从当前位置移到期望位置。而是把当前位置和期望位置的距离转化为能量,通过能量推动顶点从当前位置移到目标位置。
因此称为投影动力学
这个能量与弹簧能量有什么区别
$$ E(\mathbf{x})=\sum _ {e=(i,j)}\frac{k}{2}(||\mathbf{x} _ i-\mathbf{x} _ j||-L _ e)^2 $$
$$ \mathbf{f} _ i=−\nabla_iE(\mathbf{x} )=−{\textstyle \sum _{e:i\in e}}(\mathbf{x} _ i−\mathbf{x} _ j)−(\mathbf{x} _ {e,i}^{\mathrm{new}} −\mathbf{x} _ {e,j}^{\mathrm{new} }) $$
弹簧系统和\(PD\)都是基于当前状态\((x_i、x_j)\)和投影状态\((p)\)来计算能量,且所使用的公式都是基于胡克定理,看上去没有区别。
区别在于\(p\)。\(p\)是由\(x\)投影得到的,但\(PD\)在优化的过程中假设\(p\)是一个定值,即\(f\)与\(H\)都与\(p\)无关,这就简化了后面的优化步骤。
P23
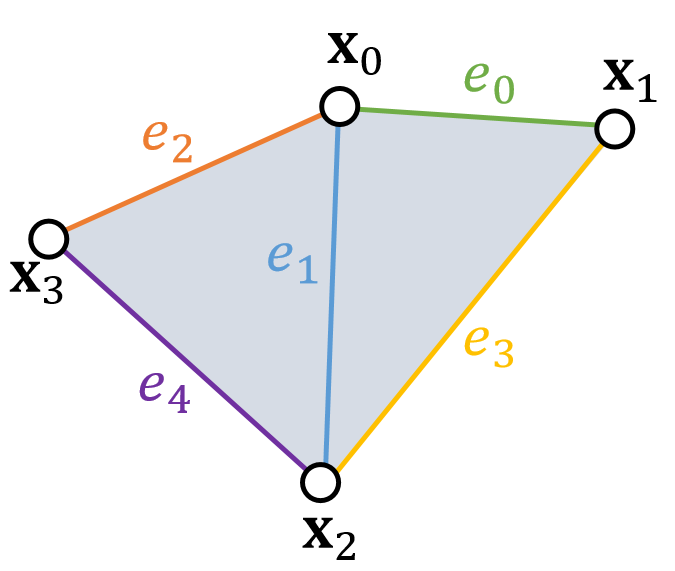
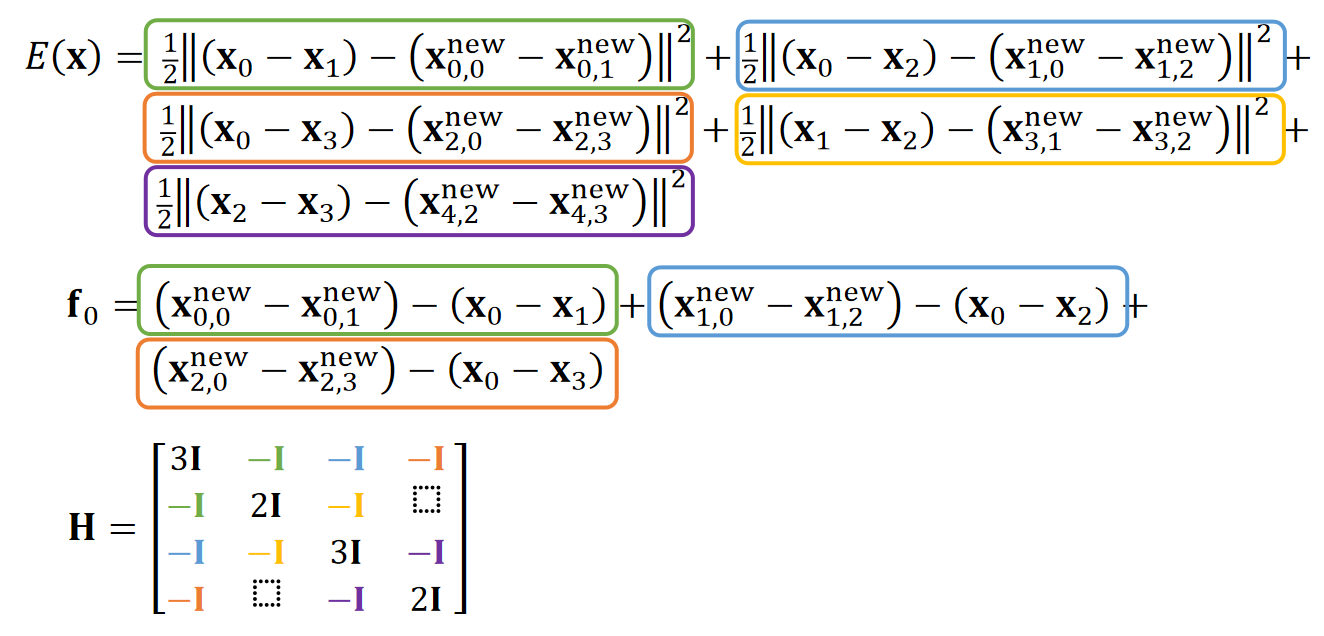
✅ 同一个顶点在三个不同边上的投影是不同的。
✅ 可以直接根据Mesh的拓扑关系构造H矩阵。
✅ 为什么能简化\(\mathbf{H}\)的计算?答:在计算某一个端点时,假设另一个端点不动(常量),那么能量就是只关于这个端点的二次函数
\(PD\) 的优势
以这种方式定义能量,得到的H是一个只与弹簧拓扑有关的定值。这个定值不光构造简单,也能简化计算。
在以牛顿法的优化迭代方法中,需要解线性系统\(Ax=b\)。复杂的A使得线性系统难以求解。
✅ 解线性系统的主要耗时在LU分解,而这个算法中\(\mathrm{H}\)是常数矩阵,只需要做一次LU分解,简化了对\(\mathrm{H}\)分解的计算量。
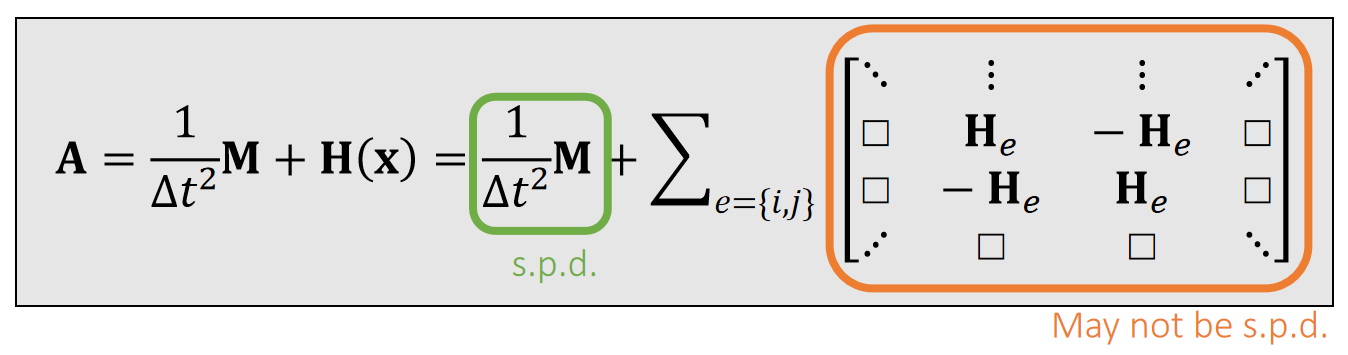
由A的定义可知,当H是定值时,A也是一个定值。那么可以对A做一些预计算,以加速线性系统\(Ax=b\)的求解。
如果只是使用了\(PD\)的方法来构造能量和\(H\),但没有对\(A\)做预计算,实际上没有发挥\(PD\)的核心优势。
\(PD\) 的优势来源于此,局限性也来源于此。如果一个约束不能简化出这种简单的 \(H\),就不能使用\(PD\)来做。
P28
After-Class Reading
| ID | Year | Name | Note | Tags | Link |
|---|---|---|---|---|---|
| 2014 | Projective Dynamics: Fusing Constraint Projections for Fast Simulation |
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES103_mdbook/