P4
弹簧质点模型
✅ 整体流程就像是对 Mesh 上的每个顶点独立地进行粒子仿真,只是力变得复杂,因为在粒子之间增加了弹簧。当弹簧发生形变,就产生了弹簧力(内力)。
✅ 通过在粒子间构造弹簧来约束 Mesh 边长尽量不变。通过构造网状的弹簧系统来保证 Mesh 面片不发生形变。通过增加对角顶点的弹簧来约束 Mesh 体积上的形变。
---
title: 弹簧系统
---
flowchart LR
Current(["当前状态"])
Constrain[("约束")]
Outter[("外力")]
Energy(["能量"])
Force(["内力"])
Next(["下一时刻状态"])
Constrain-->Energy-->Force
Outter & Force & Current --> Integrate --> Next --> Current
积分可以是显式积分或者隐式积分。如果是显式积分,由力得到速度,速度更新状态。
---
title: 弹簧系统 - 显式积分
---
flowchart LR
Current(["当前状态"])
Constrain[("约束")]
Outter[("外力")]
Energy(["能量"])
Force(["内力"])
Velocity(["速度"])
Next(["下一时刻状态"])
Constrain-->Energy-->Force
Outter & Force --> Velocity
Velocity & Current --> Next
但显式积分存在不稳定性问题,在图形学中更常用的是隐式积分。
---
title: 弹簧系统 - 隐式积分
---
flowchart LR
Current(["当前状态"])
Constrain[("约束")]
Outter[("外力")]
Energy(["势能能量"])
Mometen(["动能能量"])
Target(["优化目标"])
Velocity(["速度"])
Next(["下一时刻状态"])
NextWoContrain(["不考虑约束的下一时刻状态"])
Outter --> Velocity
Velocity & Current --> NextWoContrain --> Mometen
Constrain-->Energy
Energy & Mometen --> Target --> Optimize --> Next
✅ 本节课所讲的套路:分析力/能量 → 隐式积分 → 通过优化解积分 → 更新,对弹簧系统、有限元、弹性体等各种物理模拟同样适用。区别在于如何构造能量和解优化问题。
构建弹簧系统
An Ideal Spring —— 一个端点
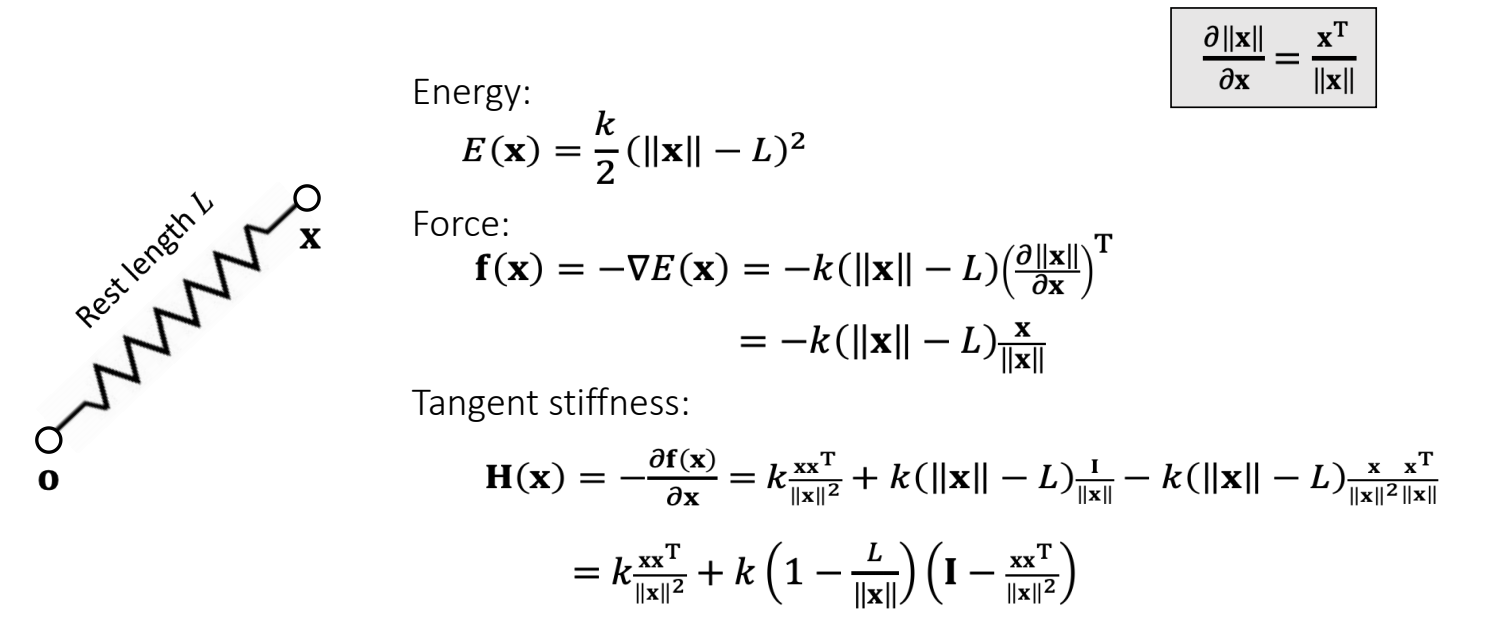
✅ Energy:物理上的弹性势能
✅ Force:物理上的力,是 Energy 的 gradient 的反方向; 公式后面有个 T,来源于前面的\(\nabla \),直观解释,前面是力的大小,后面是力的方向。
🔍 Choi and Ko. 2002. Stable But Responive Cloth. TOG (SIGGRAPH) --- 以上公式推导的详细过程
An Ideal Spring —— 两个端点
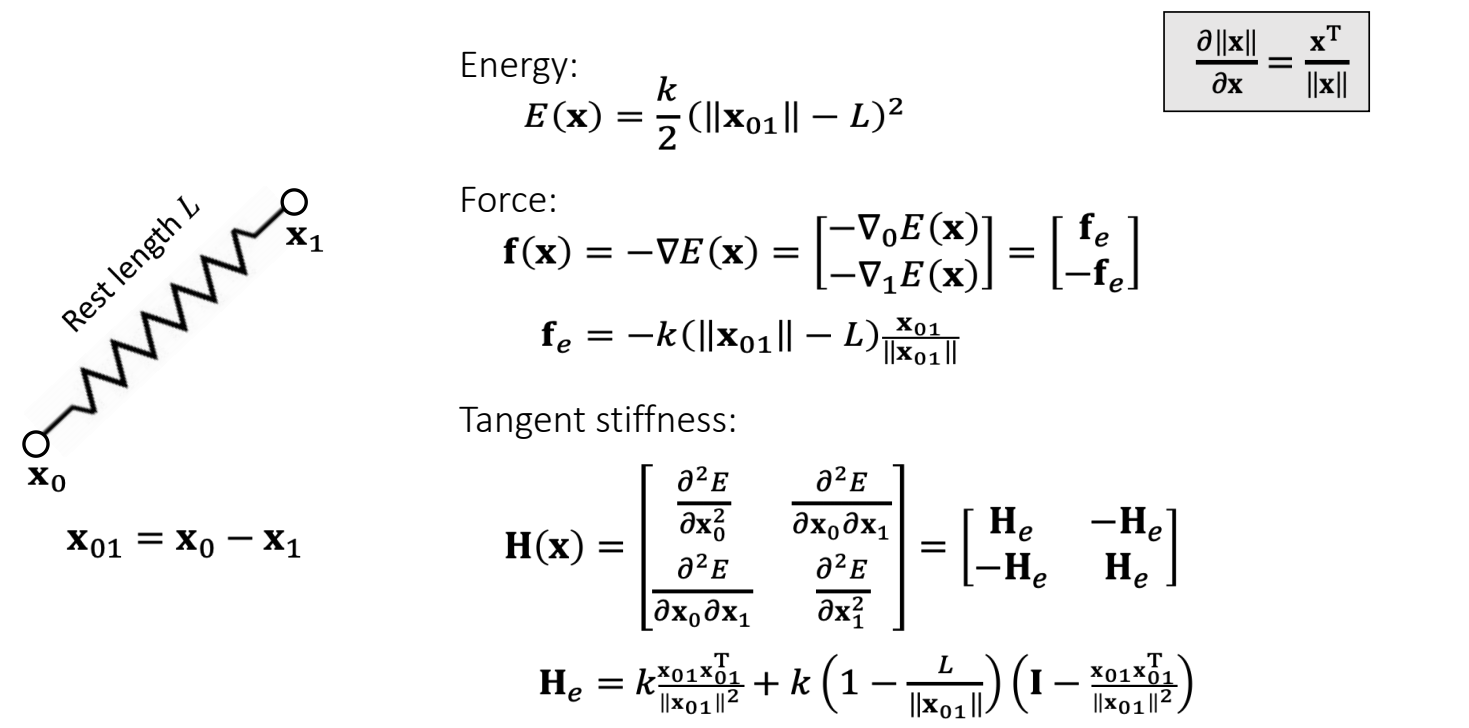
$$ \mathbf{f} _ i(\mathbf{x} )=−∇ _ i\mathbf{E} =−k(||\mathbf{x} _ i −\mathbf{x} _ j||−L)\frac{\mathbf{x} _ i −\mathbf{x} _ j}{||\mathbf{x} _ i −\mathbf{x} _ j ||} \\ \mathbf{f} _ j(\mathbf{x})=−∇ _ jE=−k (||\mathbf{x} _ j −\mathbf{x} _ i ||−L)\frac {\mathbf{x} _ j −\mathbf{x} _ i}{||\mathbf{x} _ j −\mathbf{x} _ i||} $$
P5
Multiple Springs
When there are many springs, the energies and the forces can be simply summed up.
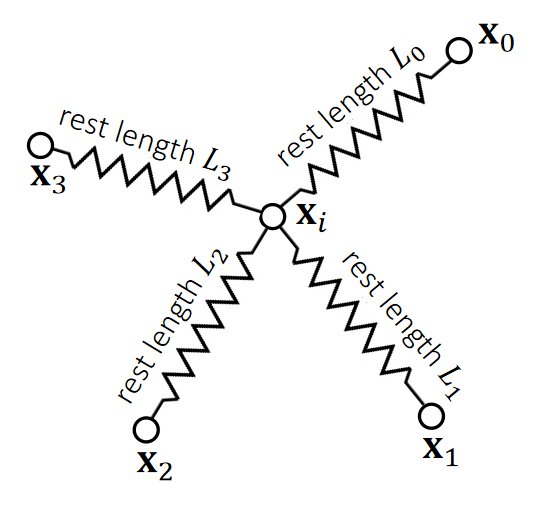
$$ E= {\textstyle \sum_{e=0}^{3}}E_e= {\textstyle \sum_{e=0}^{3}} (\frac{1}{2} k(||\mathbf{x} _i −\mathbf{x}_e ||−L_e)^2) $$
$$ f_i=−\nabla_iE = \textstyle \sum_{e=0}^{3}(−k(||\mathbf{x}_i−\mathbf{x}_e||−L_e)\frac{\mathbf{x}_i−\mathbf{x}_e}{||\mathbf{x}_i−\mathbf{x}_e||}) $$
✅ 能量和力都是可以叠加的
积分系统——显式积分
P12
与粒子仿真相同。每个 Mesh 顶点根据受力更新位置的过程涉及积分。积分离散化也可以是显式、隐式、半隐式。
Explicit integration suffers from numerical instability caused by overshooting, when the stiffness \(k\) and/or the time step \(∆t\) is too large.
✅ Explicit:当前力 → 当前速度 → 当前位置
显式积分不稳定,如果 \(Δt\) 或 \(k\) 太大,会导致 overshooting。
A naive solution is to use a small \(∆t\) . But that slows down the simulation.
✅ 解决方法:减小\(\Delta t\)。但这个方法不解决本质问题,且会降低整个模拟系统的效率
✅ 本质上是\(Δt\)太大导致积分近似的结果与实际积分的结果有很大误差,\(k\)太大或\(Δt\)只是让这个问题更明显,减小\(k\)或\(Δt\)问题仍然存在。
P13
积分系统——隐式积分
Implicit integration is a better solution to numerical instability. The idea is to integrate both x and v implicitly.
✅ Explicit和Implicit都是用某个时刻的力代表整个 \(Δt\) 时间的力,就都会出现上述误差。
✅ 区别在于,Explicit用当前力,往往使结果变大,产生爆炸,Implicit用未来力,往往使结果变小,产生消失。
✅ 消失只是结果不对。但爆炸会让结果崩溃,这是最不可接受的问题。因此用隐式代替显式。
隐式积分相对稳定,可以使用稍大的 \(Δt\),但也存在以下问题:
- 实现复杂,因此难以优化。
- 每个 \(Δt\) 的求解更耗时,因此不一定会更快。
- 可能出现数值振荡。
二元非线性方程组 -> 一元非线性方程
隐式积分用未来力计算未来速度,用未来速度计算未来位置。未来力,未来速度,未来位置都是未知量,不能直接求解,需要解方程。
✅ 粒子和刚体的仿真中使用了半隐式积分(现在的力,未来的速度)。

✅ 质点的质量可以不同吗?
答:可以不同。先根据三角形的面积计算三角的质量,再把质量分配到各个顶点上。
M是一个3n*3n的对角矩阵,具体形式为:
$$ M = \begin{pmatrix} m_1 I_3 & 0 & \cdots & 0 \\ 0 & m_2 I_3 & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & m_n I_3 \end{pmatrix} $$
假设F是一个保守力,即F是只与x有关的非线性函数,那么公式中的f[1]不是一个新的未知量。
✅ 保守力 holonomic:力的大小和方向只跟位置有关,跟速度无关。例如重力,弹力。那么 \(f\)可以写成关于位置的函数\(f(x)\)。但\(f(x)\)不一定是线性的。
公式 2 代入公式 1 并消元,得:
$$ \mathbf{v} ^{[1]}=\mathbf{v}^{[0]}+∆t\mathbf{M} ^{−1}\mathbf{f} (\mathbf{x}^{[0]}+∆t\mathbf{v} ^{[1]}) $$
或把公式1代入公式2并消元,得:
消元得:
$$
\mathbf{x} ^{[1]}=\mathbf{x} ^{[0]}+\Delta t\mathbf{v} ^{[0]}+\Delta t^2\mathbf{M} ^{-1}\mathbf{f}(x^{[1]})
$$
对x或v消元,解法都是类似的。最后都转化为解非线性方程的问题。
线性近似法:求解一元非线性方程->解线性系统
✅ 近似成线性问题后直接解方程。这种方法相当于每一个Step做了一次牛顿法。
以对x消元结果为例,\(\mathbf{f}\) 在 \(\mathbf{x}^{[0]}\) 处泰勒展开,得:
$$ \mathbf{v} _{t+1}=\mathbf{v}_t+∆t\mathbf{M} ^{−1}[\mathbf{f} (\mathbf{x}_t)+\frac{\partial \mathbf{f} }{\partial \mathbf{x} }(\mathbf{x} _t) ∆t\mathbf{v} _{t+1}] $$
整理后得:
$$ [\mathbf{I}-∆t^2\mathbf{M} ^{−1}\frac{\partial \mathbf{f} }{\partial \mathbf{x} }(\mathbf{x} _t) ]\mathbf{v} _{t+1}=\mathbf{v}_t+∆t\mathbf{M} ^{−1}\mathbf{f} (\mathbf{x}_t) $$
这就成了一个解线性系统的问题。解线性系统见Linear Solver
问:为什么不直接求逆?
答:求逆太贵
这个公式再泛化一下,引入一个beta,就可以把隐式积分与之前的显式积分、中点法积分统一起来。
$$ [\mathbf{I} -\beta \Delta t^2\mathbf{M} ^{-1}\frac{\partial \mathbf{f} }{\partial \mathbf{x} }(\mathbf{x} _t )]\mathbf{v} _{t+1}=\mathbf{v} _t+\Delta t\mathbf{M} ^{-1}\mathbf{f} (\mathbf{x} _t) $$
❶ \(\beta\) = 0: forward/semi-implicit Euler (explicit)
❷ \(\beta\) = 1/2: middle-point (implicit)
❸ \(\beta\) = 1: backward Euler (implicit)
方法二:求解一元非线性方程->优化问题
✅ 课后答疑:
能量优化的方法很少用于刚体,主要是有限元、弹性体、衣服模拟。
构造优化目标F(x):
$$ F(\mathbf{x}) = \frac{1}{2∆t^2}||\mathbf{x} −\mathbf{x} ^{[0]}−∆t\mathbf{v} ^{[0]}||_\mathbf{M}^2+E(\mathbf{x} ) $$
有: $$ \mathbf{x} ^{[1]} = \argmin F(\mathbf{x}) $$
✅ 前面方程解\({x} ^{[1]}\)等价于F(x)函数极小点。等价转换的推导在补充1。非线性方程问题为转化为优化问题。
✅ 其中:\(\mathbf{M}\)对角矩阵,描述质量,\(3N \times 3N\)。\(\mathbf{x}\)为 \(3N\times 1\)矢量,描述顶点信息。\(E\) 为所有的力的能量。\(\mathbf{||x||_M^2=x^TMx} \)。
✅ 只有保守力能用能量描述、非保守力(例如摩擦力)则不行。
定义 \(\mathbf{g(x)} =\mathbf{x} ^{[0]}+\Delta t\mathbf{v}^{[0]}+\Delta t^2M^{-1}f(\mathbf{x}^{[1]})-\mathbf{x} ^{[1]}\)
也可以得出:\(x^{[1]}=\mathrm{argmin} (g(\mathbf{x} )^2)\) 或 \(\mathbf{x}^{[1]}=\mathrm{argmin} |\mathbf{g(x)}|\)
只是这样构造出的优化问题,求导比较难计算。
P18
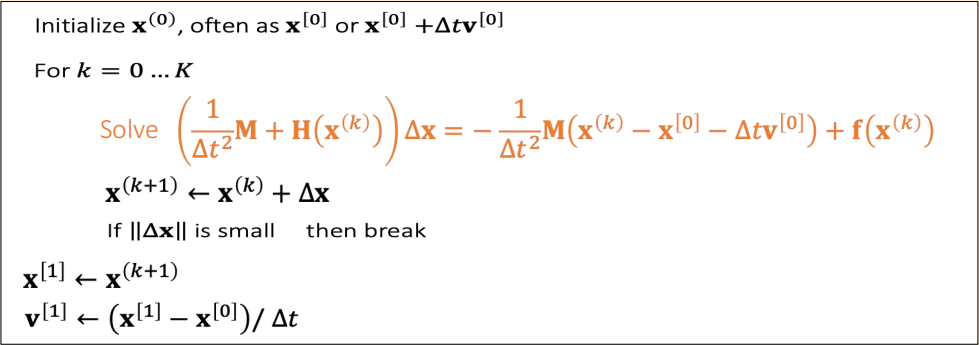
Newton’s Method:解优化问题->解线性系统
🔎 Newton-Raphson Method见补充2. 这里直接开始Newton方向在本当前场景的应用。
Specifically to simulation, we have:
$$ F (\mathbf{x} )=\frac{1}{2∆t^2} ||\mathbf{x} −\mathbf{x} ^{[0]}−∆t\mathbf{v} ^{[0]}||_\mathbf{M} ^2+\mathbf{E} (\mathbf{x} ) $$
$$ ∇F(\mathbf{x}^{(k)})=\frac{1}{∆t^2}\mathbf{M} (\mathbf{x} ^{(k)}−\mathbf{x} ^{[0]}−∆t\mathbf{v} ^{[0]})−\mathbf{f}(\mathbf{x}^{(k)})=b $$
$$ \frac{∂^2F (\mathbf{x} ^{(k)})}{∂\mathbf{x} ^2} =\frac{1}{∆t^2} \mathbf{M} +\mathbf{H} (x^{(k)})=\mathbf{A} $$
解线性系统 \(A \Delta \mathbf{x} =b\)
Positive Definiteness of Hessian
为了让优化问题收敛,我们希望A是正定的,具体原因见补充材料。
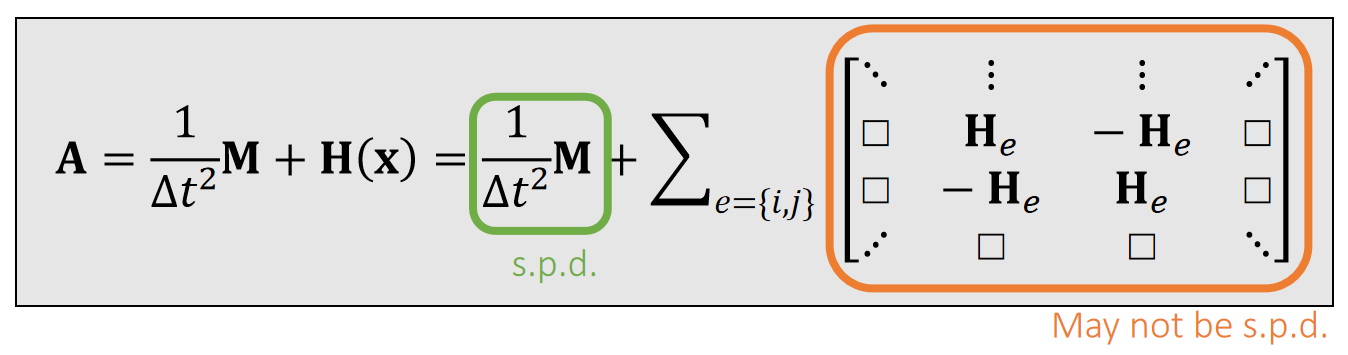
✅ 而A的正定性取决于\(H(x)\) 的正定性。 ✅ \(H(x)\)的维度是\(3N \times 3N\),N 是弹簧数。每个\(H_e\)的维度是\(3 \times 3\)。它是由所有弹簧的H构成的。
✅ H(x)的正定性则是由 \(H_e\) 的正定性决定。
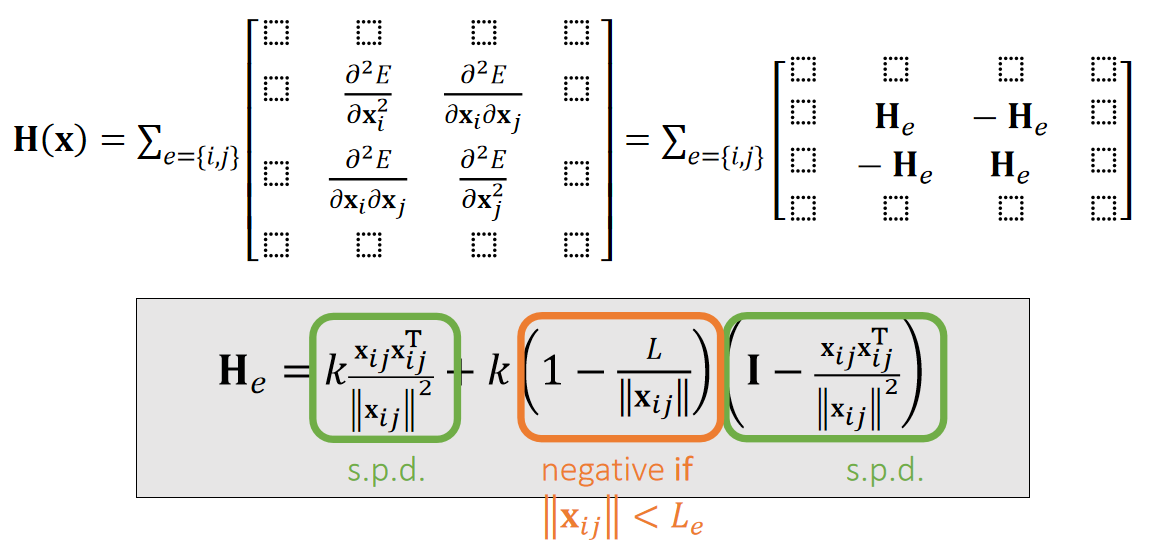
下面分析\(H_e\)的正定性:
For any \(\mathbf{x} _{ij}, \mathbf{v} ≠0\),
$$ \mathbf{V}^\mathbf{T}\frac{{\mathbf{x} _{ij}\mathbf{x} _{ij}}^\mathbf{T} }{||\mathbf{x} _{ij}||^2}\mathbf{V}=||\frac{{\mathbf{x} _{ij}}^\mathbf{T} \mathbf{v} }{||\mathbf{x} _{ij}||}||^2> 0 $$
$$ \mathbf{V} ^\mathbf{T} (\mathbf{I} -\frac{{\mathbf{x} _{ij}\mathbf{x} _{ij}}^\mathbf{T} }{||\mathbf{x} _{ij}||^2}) \mathbf{V} =\frac{||\mathbf{x} _{ij}||^2||\mathbf{v} ||^2-||{\mathbf{x} _{ij}}^\mathbf{T} \mathbf{v} ||^2}{||\mathbf{x} _{ij}||^2}\ge 0 $$
✅ \( \mathbf{x}_ {ij}\) 代表顶点\( \mathbf{x}_ {i}\)和顶点\( \mathbf{x}_ {j}\)的位置的差。
✅ 最后一个公式分子满足柯西不等式
✅ 结论:\(||x_{ij}||< Le\). 代表弹簧处于压缩状态。此时 He 有可能非正定(可能有多个极小值点),但拉伸时一定正定。
✅ He 正定则\(H(x)\)半正定,此时弹簧系统有唯一解。
✅ \(\Delta t\)越小,A越容易正定、弹簧系统越稳定。
✅ 但是A不正定,不代表没有唯一解。
P23
Enforcement of Positive Definiteness
✅ 不正定最大的问题不是解不唯一,因为解出任意一个解都能让模拟系统进行下去。
✅ 非正定的主要问题,是数学计算上的不稳定,可能导致解不出来;
- One solution is to simply drop the ending term, when \({\color{Orange}{ ||\mathbf{x} _{ij}||<\mathbf{L} _e}}:\)

✅ 简单粗爆的解决方法就是把后面这项删掉。
🔎 Choi and Ko. 2002. Stable But Responive Cloth. TOG (SIGGRAPH) --- 其它让He正定的方法
P27
After-Class Reading
🔎 Baraff and Witkin. 1998. Large Step in Cloth Simulation. SIGGRAPH.
✅这篇论文是衣服模拟的经典论文,第一个用隐式积分做衣服模型的论文。论文没有用弹簧系统,而是另一套模型。
✅ 关注其中解隐式积分的部分,没有做非线性优化或解非线性方程,而是把非线性方程线性化,等价于做一次牛顿迭代。
🔎 Fast mass - spring system solver
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES103_mdbook/