P3
Topics for the Day
-
Hessian of Elastic Energy
-
Implicit Integration
-
Nonlinear optimization.
✅ 隐式积分不讲了。推荐P12页的论文
✅ 直接跳到 P18、非线性优化。
P4
Hessian of Elastic Energy
P5
Recall that…
P6
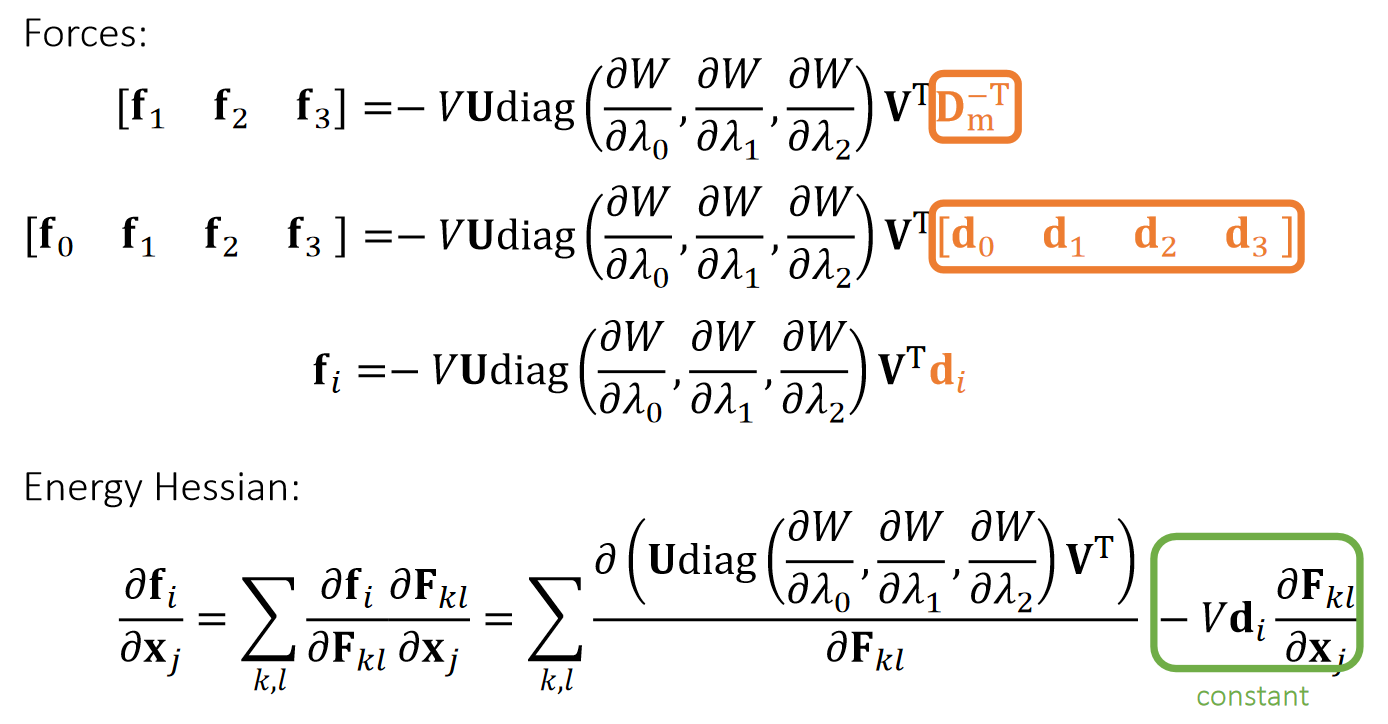
Energy Hessian:
P7
SVD Derivative
Since \(\mathbf{F=UΛV^T}\)is singular value decomposition \((\mathbf{Λ} =\mathrm{diag} (λ_0,λ_1,λ_2))\), we can do:
$$ \mathbf{U^T} \frac{∂\mathbf{F} }{∂\mathbf{F} _{kl}}\mathbf{V} =\mathbf{U^T} (\frac{∂\mathbf{U} }{∂\mathbf{F} _{kl}}\mathbf{ΛV^T} +\mathbf{U}\frac{∂\mathbf{Λ} }{∂\mathbf{F} _{kl}}\mathbf{V^T}+\mathbf{UΛ}\frac{∂\mathbf{V^T} }{∂\mathbf{F} _{kl}})\mathbf{V} $$
$$ \mathbf{U^T} \frac{∂\mathbf{F} }{∂\mathbf{F} _{kl}}\mathbf{V} =(\mathbf{U^T} \frac{∂\mathbf{U} }{∂\mathbf{F} _{kl}})\mathbf{Λ} +\frac{∂\mathbf{Λ} }{∂\mathbf{F} _{kl}}+ \mathbf{Λ}(\frac{∂\mathbf{V^T} }{∂\mathbf{F} _{kl}}\mathbf{V}) $$
$$ \mathbf{U^T} \frac{∂\mathbf{F} }{∂\mathbf{F} _{kl}}\mathbf{V} = \mathbf{AΛ} +\frac{∂\mathbf{Λ} }{∂\mathbf{F} _{kl}}+ \mathbf{ΛB} $$
P8
Skew-Symmetric Matrix
Matrix \(\mathbf{A}\) is skew-symmetric (or anti-symmetric), if \(\mathbf{A=−A^T}\):
$$ \mathbf{A} =\begin{bmatrix} 0 & a & b \\ -a & 0 & c \\ -b & -c & 0 \end{bmatrix} $$
If \(\mathbf{D}\) is diagonal, then:
$$ \mathbf{AD} =\begin{bmatrix} 0 & a & b \\ -a & 0 & c \\ -b & -c & 0 \end{bmatrix}\begin{bmatrix} d & 0 &0 \\ 0 & e & 0\\ 0 & 0 &f \end{bmatrix}=\begin{bmatrix} 0 & ? & ?\\ ? & 0 &? \\ ? & ? &0 \end{bmatrix} $$
$$ \mathbf{DA} = \begin{bmatrix} d & 0 & 0\\ 0 & e & 0\\ 0 & 0 &f \end{bmatrix}\begin{bmatrix} 0 & a & b\\ -a & 0 &c \\ -b & -c &0 \end{bmatrix}=\begin{bmatrix} 0 & ? &? \\ ? & 0& ?\\ ? & ? &0 \end{bmatrix} $$
When \(\mathbf{U}\) is orthogonal, we have:
$$ \mathbf{0} =\frac{∂(\mathbf{U^TU)}}{∂\mathbf{F} _{kl}} =\mathbf{U^T} \frac{ ∂\mathbf{U} }{∂\mathbf{F} _{kl}}+\frac{∂\mathbf{U^T}}{∂\mathbf{F} _{kl}}\mathbf{U} =\mathbf{U^T}\frac{∂\mathbf{U} }{∂\mathbf{F} _{kl}}+(\mathbf{U^T} \frac{∂\mathbf{U}}{∂\mathbf{F} _{kl}})^\mathbf{T} $$
Therefore, \(\mathbf{A=U^T}\frac{∂\mathbf{U} }{∂\mathbf{F} _{kl}}\) is skew-symmetric. So is \(\mathbf{B} =\frac{∂\mathbf{V^T} }{∂\mathbf{F} _{kl}} \mathbf{V}\).
P9
SVD Derivative (cont.)
Since \(\mathbf{F=UΛV^T}\) is singular value decomposition \(\mathbf{Λ} =\mathrm{diag} (λ_0,λ_1,λ_2)\), we can do:
$$ \mathbf{U^T} \frac{∂\mathbf{F} }{∂\mathbf{F} _{kl}}\mathbf{V} = \mathbf{AΛ} +\frac{∂\mathbf{Λ} }{∂\mathbf{F} _{kl}}+\mathbf{ΛB} $$
After expansion, we get:
$$
\mathbf{U^T} \frac{∂\mathbf{F}}{∂\mathbf{F} _{kl}} \mathbf{V} =
\begin{bmatrix}
0 & a_0 & a_1\\
-a_0 & 0 & a_2\\
-a_1& -a_2 &0
\end{bmatrix} \begin{bmatrix}
λ_0 & \Box & \Box\\
\Box & λ_1 &\Box \\
\Box & \Box &λ_2
\end{bmatrix} \begin{bmatrix}
\frac{∂λ_0}{∂\mathbf{F} _{kl}} & \Box & \Box\\
\Box & \frac{∂λ_1}{∂\mathbf{F} _{kl}} & \Box\\
\Box & \Box &\frac{∂λ_2}{∂\mathbf{F} _{kl}}
\end{bmatrix} \begin{bmatrix}
λ_0 & \Box & \Box \\
\Box & λ_1 &\Box \\
\Box & \Box &λ_2
\end{bmatrix} \begin{bmatrix}
0 & b_0& b_1\\
-b_0 & 0 &b_2 \\
-b_1 & -b_2 &0
\end{bmatrix}
$$
P10
SVD Derivative (cont.)
Since \(\mathbf{F=UΛV^T}\) is singular value decomposition \(\mathbf{Λ}=\mathrm{diag} (λ_0,λ_1,λ_2)\), we can do:
$$ \mathbf{U^T} \frac{∂\mathbf{F} }{∂\mathbf{F} _{kl}}\mathbf{V} =\mathbf{AΛ} +\frac{∂\mathbf{Λ} }{∂\mathbf{F} _{kl}}+\mathbf{ΛB} $$
After expansion, we get:
$$
\mathbf{U^T} \frac{∂\mathbf{F}}{∂\mathbf{F} _ {kl}}\mathbf{V}
= \begin{bmatrix}
∂λ _ 0/∂\mathbf{F} _ {kl} & λ _ 1 a _ 0 + λ _ 0 b _ 0 & λ _ 2 a_ 1 + λ _ 0 b _ 1 \\
−λ _ 0 a_ 0 − λ _ 1 b _ 0 & ∂λ _ 1/∂ \mathbf{F} _ {kl} & λ _ 2 a _ 2 + λ _ 1 b _ 2\\
−λ _ 0 a_ 1−λ_ 2b_ 1 & −λ_ 1a_ 0a_ 2−λ_ 2b_ 2 &∂λ_ 2/∂ \mathbf{F} _ {kl}
\end{bmatrix}
$$
$$ \begin{bmatrix} m_ {00} & m_ {01} & m_ {02} \\ m_ {10} & m_ {11} & m_ {12} \\ m_ {20} & m_ {21} & m_ {22} \end{bmatrix} = \begin{bmatrix} ∂λ_0/∂\mathbf{F} _{kl} & λ_1a_0+λ_0b_0 & λ_2a_1+λ_0b_1\\ −λ_0a_0−λ_1b_0 & ∂λ_1/∂ \mathbf{F} _{kl} & λ_2a_2+λ_1b_2\\ −λ_0a_1−λ_2b_1 & −λ_1a_0a_2−λ_2b_2 &∂λ_2/∂ \mathbf{F} _ {kl} \end{bmatrix} $$
Eventually, we get: \(\mathbf{A=U^T} \frac{∂\mathbf{U} }{∂\mathbf{F} _{kl}}, \mathbf{B} = \frac{∂\mathbf{V^T} }{∂\mathbf{F} _{kl}}\mathbf{V} \) and \(∂λ_0/∂\mathbf{F} _{kl}, ∂λ_1/∂\mathbf{F} _{kl}, ∂λ_2/∂\mathbf{F} _{kl}\).
P11
A Quick Summary
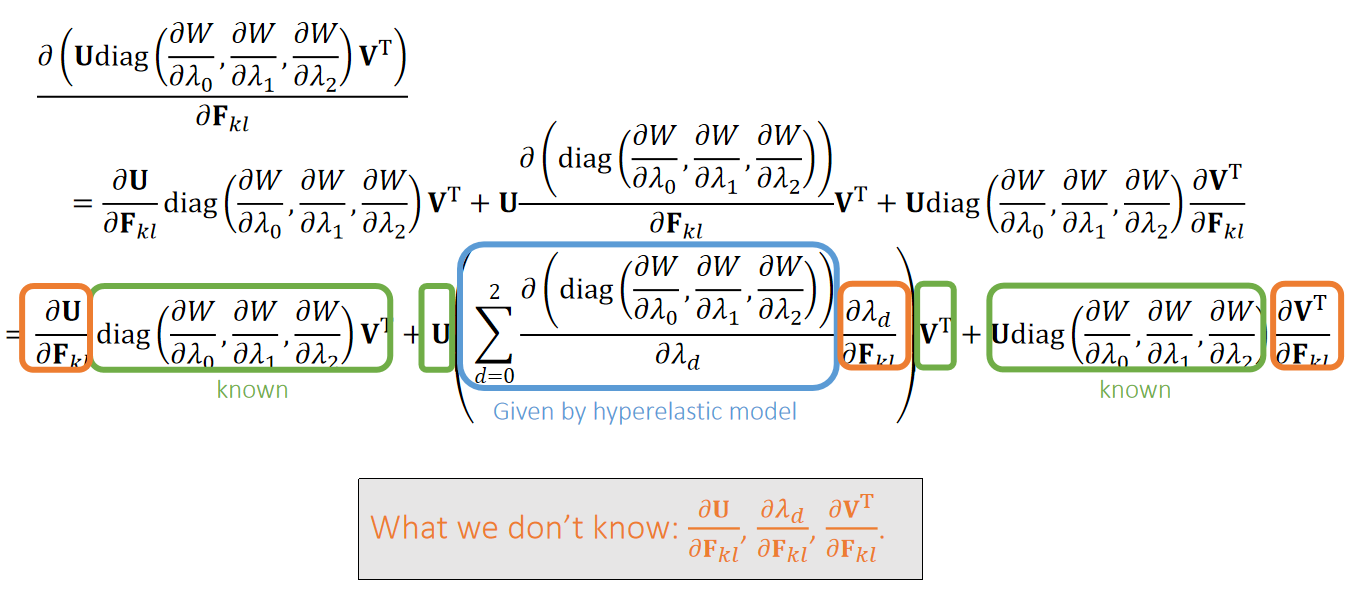
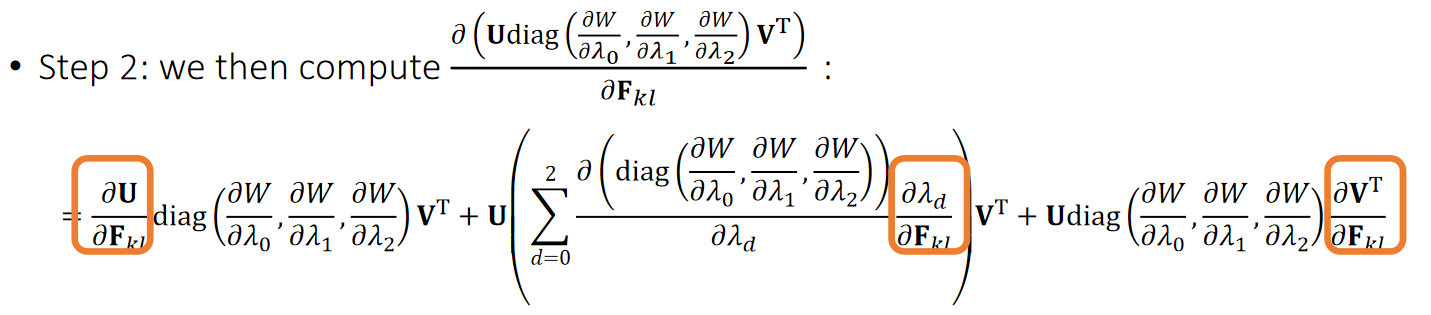
- Step 1: By SVD derivatives, we get: \(\frac{∂\mathbf{U} }{∂\mathbf{F} _{kl}},\frac{∂λ_d}{∂\mathbf{F} _{kl}},\frac{∂\mathbf{V^T} }{∂\mathbf{F} _{kl}}\).
- Step 3: Finally, we reach our goal in Hessian matrix:
$$ \frac{∂\mathbf{f} _i}{∂\mathbf{x} _j}=\sum _ {k,l}\frac{∂\mathbf{f} _i}{∂\mathbf{F} _{kl}} \frac{∂\mathbf{F} _{kl}}{∂\mathbf{x} _j}=\sum _ {k,l} \frac{∂(\mathrm{Udiag} (\frac{∂W} {∂λ_0},\frac{∂W} {∂λ_1},\frac{∂W} {∂λ_2})\mathbf{V^T}) }{∂\mathbf{F} _{kl}}−V\mathbf{d} _i\frac{∂\mathbf{F} _{kl}}{∂\mathbf{x} _j} $$
P12
After-Class Reading
Xu et al. 2015. Nonlinear Material Design Using Principal Stretches. TOG (SIGGRAPH).
Definitely read this paper if you decide to implement it.
P13
Implicit Integration
P14
Implicit Integration
Recall that we need implicit integration to avoid numerical instability (Class 5, page 13):
$$
\begin{cases}
\mathbf{v} ^{[1]}=\mathbf{v} ^{[0]}+∆t\mathbf{M} ^{−1}\mathbf{f} ^{[1]} \\
\mathbf{x} ^{[1]}=\mathbf{x} ^{[0]}+∆t\mathbf{v} ^{[1]}
\end{cases}
$$
$$\mathrm{or} $$
$$
\begin{cases}
\mathbf{x} ^{[1]}=\mathbf{x} ^{[0]}+∆t\mathbf{v} ^{[0]}+∆t^2\mathbf{M} ^{−1}\mathbf{f} ^{[1]} \\
\mathbf{v} ^{[1]}=(\mathbf{x} ^{[1]}−\mathbf{x} ^{[0]})/∆t
\end{cases}
$$
We also said that:
$$ \mathbf{x} ^{[1]}=\mathbf{x} ^{[0]}+∆t\mathbf{v} ^{[0]}+∆t^2\mathbf{M} ^{−1}\mathbf{f}(\mathbf{x}^{[1]}) $$
$$ \Updownarrow $$
$$ \mathbf{x} ^{[1]}=\mathrm{argmin } F (\mathbf{x} ) \quad \mathrm{for} \quad\mathbf{F} (\mathbf{x} )=\frac{1}{2∆t^2}||\mathbf{x} −\mathbf{x} ^{[0]}−∆t\mathbf{v} ^{[0]}||_M^2+E(\mathbf{x} ) $$
P15
Newton-Raphson Method
The Newton-Raphson method, commonly known as Newton’s method, solves the optimization problem: \(x^{[1]}\)=argmin \(F(x)\). \(\quad\quad\) \((F(x)\) is Lipschitz continuous.)
Given a current \(x^{(k)}\), we approximate our goal by:
$$ 0={F}'(x)≈{F}'(x^{(k)})+{F}'' (x^{(k)})(x−x^{(k)}) $$
P16
Newton-Raphson Method
Now we can apply Newton’s method to: \(\mathbf{x} ^{[1]}\)= argmin \( F (\mathbf{x} )\).
Given a current \(\mathbf{x}^{(k)}\), we approximate our goal by:
$$ \mathbf{0} =∇F(\mathbf{x} )≈∇F(\mathbf{x} ^{(k)})+\frac{∂F^2(\mathbf{x} ^{(k)})}{∂\mathbf{x} ^2} (\mathbf{x} −\mathbf{x} ^{(k)}) $$
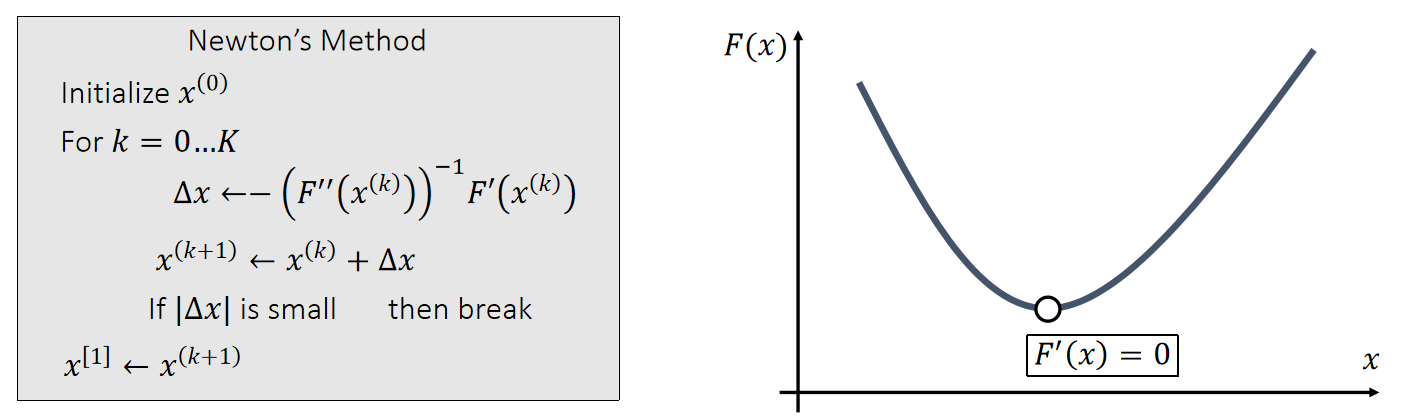
Newton’s Method
Initialize \(x^{(0)}\)
For \(k=0…K\)
$$ ∆\mathbf{x} \longleftarrow −(\frac{∂F^2(\mathbf{x} ^{(k)})}{∂\mathbf{x} ^2})^{−1}∇F(\mathbf{x} ^{(k)}) $$ $$ \mathbf{x} ^{(k+1)}\longleftarrow \mathbf{x} ^{(k)}+∆\mathbf{x} $$ If \(||∆\mathbf{x}||\) is small \(\quad\quad\)then break
$$ \mathbf{x} ^{[1]}\longleftarrow \mathbf{x} ^{(k+1)} $$
P17
Simulation by Newton’s Method
Specifically to simulation, we have:
$$ F (\mathbf{x} )=\frac{1}{2∆t^2} ||\mathbf{x} −\mathbf{x} ^{[0]}−∆t\mathbf{v} ^{[0]}||_M^2+E(\mathbf{x} ) $$
$$ ∇F(\mathbf{x} ^{(k)})=\frac{1}{∆t^2}\mathbf{M} (\mathbf{x} ^{(k)}−\mathbf{x} ^{[0]}−∆t\mathbf{v} ^{[0]})−\mathbf{f} (\mathbf{x} ^{(k)}) $$
$$ \frac{∂^2F(\mathbf{x} ^{(k)})}{∂\mathbf{x} ^2} =\frac{1}{∆t^2}\mathbf{M} +\mathbf{H} (\mathbf{x} ^{(k)}) $$
Initialize \(\mathbf{x}^{(0)}\), often as \(\mathbf{x} ^{[0]}\) or \(\mathbf{x} ^{[0]} +∆t\mathbf{v} ^{[0]}\)
For \(k=0…K\)
$$ \mathrm{Solve}\quad (\frac{1}{∆t^2} \mathbf{M+H} (\mathbf{x} ^{(k)}))∆\mathbf{x} =− \frac{1}{∆t^2}\mathbf{M} (\mathbf{x} ^{(k)}−\mathbf{x} ^{[0]}−∆t\mathbf{v} ^{[0]})+\mathbf{f} (\mathbf{x} ^{(k)}) $$ $$ \mathbf{x} ^{(k+1)}\longleftarrow \mathbf{x} ^{(k)}+∆\mathbf{x} $$ If ||\(∆\mathbf{x}\)|| is small \(\quad\quad\) then break
$$ \mathbf{x} ^{[1]}\longleftarrow \mathbf{x} ^{(k+1)} $$ $$ \mathbf{v} ^{[1]}←(\mathbf{x} ^{[1]}−\mathbf{x} ^{[0]})/ ∆t $$
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES103_mdbook/