P22
投影动力学 (Projective Dynamics)
原理
✅ PBD方法直接拿约束来修复顶点位置,没有物理含义。而Projective Dynatics把projection方法跟物拟模拟结合起来。
✅ Projective Dynamics与PBD的差别主要体现在用约束来做什么。
Projective Dynamics将约束转化为能量,通过最小化能量函数来求解系统的状态。因此是一种基于优化的物理仿真方法
PD 与弹簧系统的区别在于,弹簧系统基于弹簧力计算能量。PD 基于约束计算能量。
能量和力
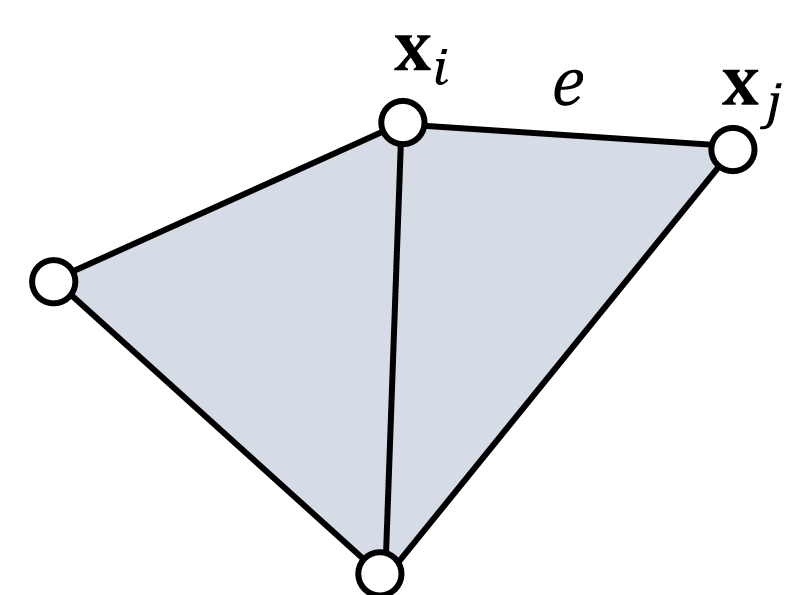
\(E(\mathbf{x} ) = {\textstyle \sum_{e = (i,j)}}\frac{1}{2} ||(\mathbf{x} _i−\mathbf{x} _j)−(\mathbf{x} _{e,i}^{\mathrm{new} }−\mathbf{x} _{e,j}^{\mathrm{new} })||^2\)
{\(\mathbf{x} _{e,i}^{\mathrm{new} },\mathbf{x} _{e,j}^{\mathrm{new} }\)} = \(\mathrm{Projection} _e(\mathbf{x}_i,\mathbf{x}_j)\) for every edge \(e\)
✅ 本文基于约束定义能量。{\(\mathbf{x} _{e,i}^{\mathrm{new} },\mathbf{x} _{e,j}^{\mathrm{new} }\)}为期望的顶点位置。不直接把顶点从当前位置移到期望位置。而是把当前位置和期望位置的距离转化为能量,通过能量推动顶点从当前位置移到目标位置。
$$ E(\mathbf{x})=\sum _{e=(i,j)}\frac{k}{2}(||\mathbf{x}_i-\mathbf{x}_j||-L_e)^2 $$
$$ \mathbf{f} _i=−\nabla_iE(\mathbf{x} )=−{\textstyle \sum _{e:i\in e}}(\mathbf{x} _i−\mathbf{x} _j)−(\mathbf{x} _{e,i}^{\mathrm{new}} −\mathbf{x} _{e,j}^{\mathrm{new} }) $$
✅ 基于 \(E(\mathbf{x})、\mathbf{x}_i^{\mathrm{new} } 、\mathbf{x}_j^{\mathrm{new} }\) 计算力,此时假设\(\mathbf{x}_i^{\mathrm{new} }\)和 \(\mathbf{x}_j^{\mathrm{new} }\)都是定值,\(\mathbf{x}_i\)和 \(\mathbf{x}_j\)是变量。
✅ 本文基于约束定义能量和力,得到的结果与基于弹簧能量计算的能量和力相同。
✅ 既然 \(E\) 和 \(F\) 是一样的,何必多此一举? 答:H不同。
P23
Hessian 矩阵
Instead of blending projections in a Jacobi or Gauss-Seidel fashion as in PBD, projective dynamics uses projection to define a quadratic energy.
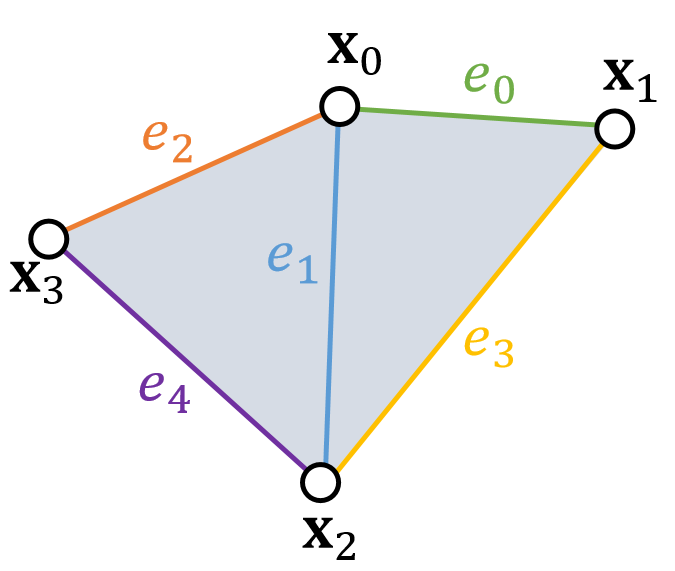
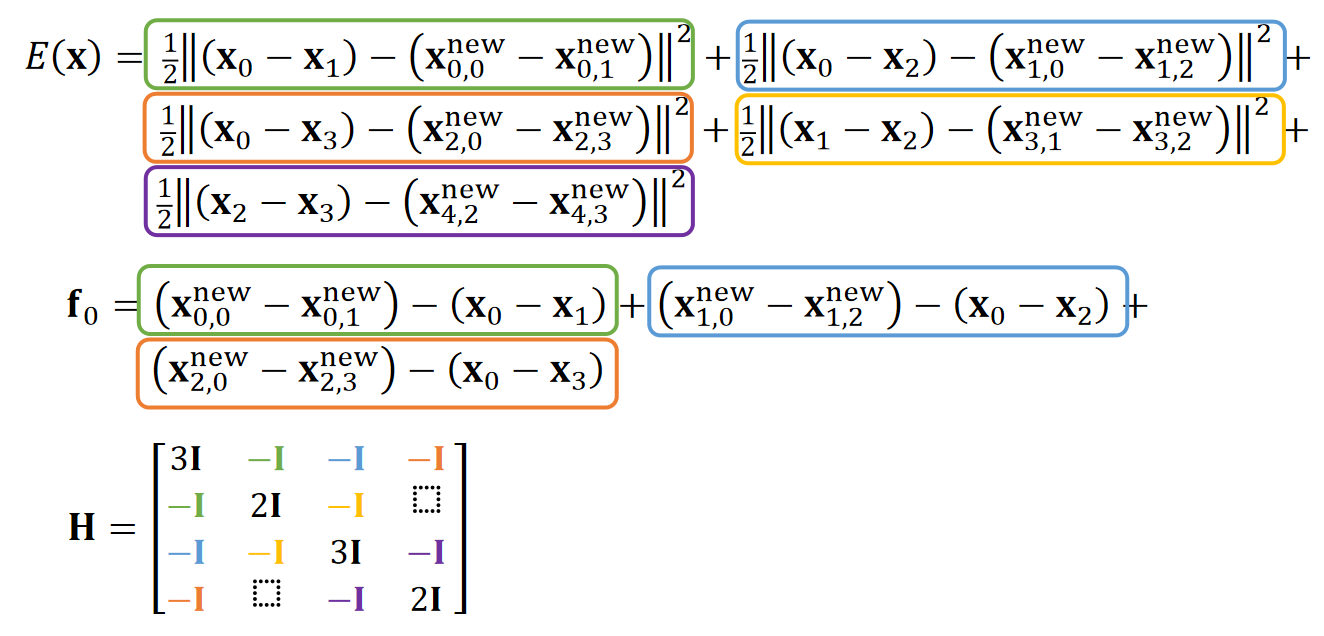
✅ 同一个顶点在三个不同边上的投影是不同的。
✅ 可以直接根据Mesh的拓扑关系构造H矩阵。
✅ 为什么能简化\(\mathbf{H}\)的计算?答:在计算某一个端点时,假设另一个端点不动(常量),那么能量就是只关于这个端点的二次函数
P24
Shape Matching
Shape matching is also projective dynamics, if we view rotation as projection:
|

| The 2D Space | The 3D Space |
|---|---|
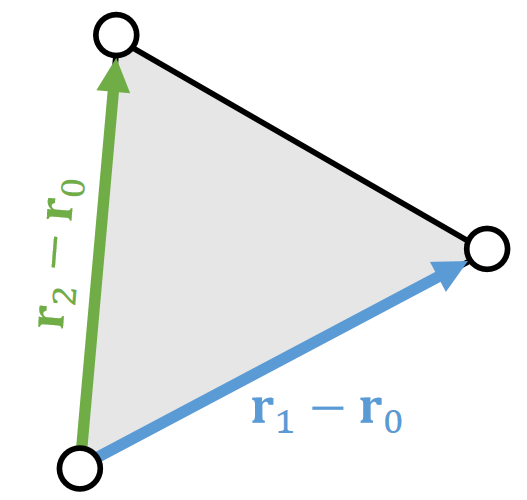 | 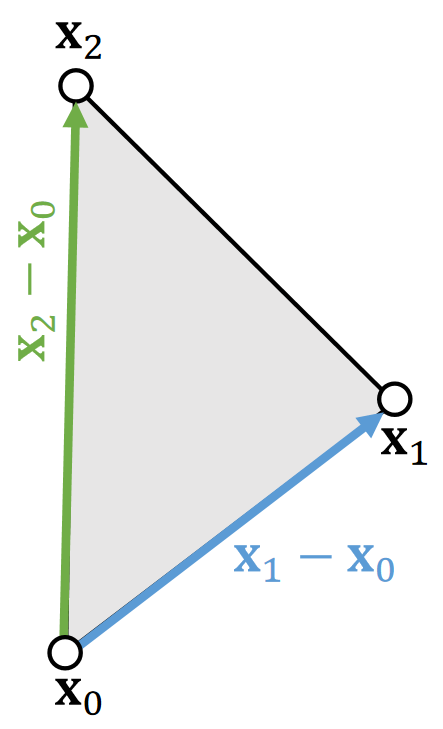 |
Assuming that \(\mathbf{{\color{Orange} R} }\) is constant,
$$
\begin{matrix}
\mathbf{f} _0=−\nabla_0E(\mathbf{x} )\\
\mathbf{f} _1=−\nabla_1E(\mathbf{x} ) \\
\mathbf{f} _2=−\nabla_2E(\mathbf{x} )\\
\mathbf{H} =\frac{∂E^2(\mathbf{x} )}{∂x^2} \quad \text{is a constant !}
\end{matrix}
$$
P25
Simulation by Projective Dynamics
-
According to implicit integration and Newton’s method, a projective dynamics simulator looks as follows, with matrix \(\mathbf{A} =\frac{1}{∆t^2}\mathbf{M+}\mathbf{H} \) being constant.
-
We can use a direct solver with only one factorization of A.
✅ 解线性系统的主要耗时在LU分解,而这个算法中\(\mathrm{H}\)是常数矩阵,只需要做一次LU分解,简化了对\(\mathrm{H}\)分解的计算量。
Initialize \(\mathbf{x} ^{(0)}\), often as\( \mathbf{x} ^{[0]} \)or \(\mathbf{x} ^{[0]} +∆t\mathbf{v} ^{[0]} \)
For \(k=0\dots K\)
\(\quad\) Recalculate projection
✅ 对于弹簧系统,Recaculate projection 这一步实际上不需要,因为直接用弹簧系统的公式算力,得到的\(f\)是一样的。
✅ 如果是做 shape matching, 还是需要这一步,用于算 \(f\)
\(\quad\) Solve \((\frac{1}{∆t^2}\mathbf{M} +\mathbf{H} )∆\mathbf{x} =−\frac{1}{∆t^2}\mathbf{M} (\mathbf{x} ^{(k)}−\mathbf{x} ^{[0]}−∆t\mathbf{v} ^{[0]})+\mathbf{f} (\mathbf{x} ^{(k)})\)
\(\quad\) \(\mathbf{x} ^{(k+1)}\longleftarrow \mathbf{x} ^{(k)}+∆\mathbf{x} \)
\(\quad\) If \(||∆\mathbf{x}||\) is small \(\quad\) then break
\(\mathbf{x} ^{[1]}\longleftarrow \mathbf{x} ^{(k+1)}\)
\(\mathbf{v} ^{[1]}\longleftarrow (\mathbf{x} ^{[1]}-\mathbf{x} ^{[0]})/∆t\)
“Newton’s Method”
P26
Preconditioned Steepest Descent
- Mathematically, this approach is preconditioned steepest descent, in which:

$$ F(\mathbf{x} )=\frac{1}{2∆t^2} ||\mathbf{x} −\mathbf{x} ^{[0]}−∆t\mathbf{v} ^{[0]}||_\mathbf{M} ^2+E(\mathbf{x} ) $$
The performance depends on how well \(\mathbf{{\color{Orange} H} }\) approximates the real Hessian.
✅\(\mathrm{H}\)不需要很精确,一个近似的正定的矩阵,就能让结果收敛。
P27
Pros and Cons of Projective Dynamics
Pros
- By building constraints into energy, the simulation now has a theoretical solution with physical meaning.
- Fast on CPUs with a direct solver. No more factorization!
Cons
✅ Fast on CPU,因为它只作一次\(\mathbf{LU}\)分解。
- Fast convergence in the first few iterations.
- Slow on GPUs. (GPUs don’t support direct solver wells.)
✅ Slow on GPU,因为\(\mathbf{LU}\)分解不适用于 \(\mathbf{GPU}\)
- Slow convergence over time, as it fails to consider Hessian caused by projection.
- Still suffering from high stiffness
- Cannot easily handle constraint changes.
✅ constraint changes: 网格关系改变导至弹簧结构改变,原来的\(\mathbf{H}\)将不再适用。
- Contacts
- Remeshing due to fracture, etc.
✅ 课后答疑:
能量优化的方法很少用于刚体,主要是有限元、弹性体、衣服模拟。
P28
After-Class Reading
| ID | Year | Name | Note | Tags | Link |
|---|---|---|---|---|---|
| 2014 | Projective Dynamics: Fusing Constraint Projections for Fast Simulation |
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES103_mdbook/