P26
Matrix: Basics
Matrix: Definition
A real matrix is a set of real elements arranged in rows and columns.
$$ A=\begin{bmatrix} a_{00} & a_{01} & a_{02} \\ a_{10}& a_{11} & a_{12} \\ a_{20}& a_{21} & a_{22} \end{bmatrix}=[a_{0} \quad a_{1} \quad a_{2}]\in \mathbf{R} ^{3\times 3} $$

$$ \mathbf{A^T=A} \quad \mathrm{Symmetric} $$
P27
Matrix: Multiplication
How to do matrix-vector and matrix-matrix multiplication? (Omitted)
- \(\mathbf{AB≠BA} \quad \quad \quad \quad \quad \quad \quad \quad \mathbf{(AB)x=A(Bx)} \)
- \(\mathbf{(AB)^T=B^TA^T} \quad \quad \quad \quad \quad \quad \mathbf{(A^TA)^T=A^TA}\)
- \(\mathbf{Ix=x} \quad \quad \quad \quad \quad \quad \quad \quad \quad \mathbf{AI=IA=A}\)
\(\quad\) - \(\mathbf{A^{−1}: AA^{−1}=A^{−1}A=I} \quad \quad \mathrm{inverse}\)
- \(\mathbf{(AB)^{−1}=B^{−1}A^{−1}}\)
- Not every matrix is invertible, e.g., \(\mathbf{A} =\begin{bmatrix} 0 & 0 & 0\\ 0 & 0 & 0\\ 0 & 0 & 0 \end{bmatrix}\)
P28
Matrix: Orthogonality
An orthogonal matrix is a matrix made of orthogonal unit vectors.
$$ \mathbf{A} =[\mathbf{a} _0\quad \mathbf{a} _1\quad \mathbf{a} _2]\quad\mathrm{such \quad that } \quad \mathbf{a}_i^\mathbf{T}\mathbf{a}_j =\begin{cases} 1,& \text{ if } i= j \text{(unit)}\\ 0.& \text{ if } i\ne j \text{(orthogonal)} \end{cases} $$
$$ \mathbf{A^TA}=\begin{bmatrix} \mathbf{a}_0^\mathbf{T} \\ \mathbf{a}_1^\mathbf{T} \\ \mathbf{a}_2^\mathbf{T} \end{bmatrix}\begin{bmatrix} \mathbf{a}_0 & \mathbf{a}_1 &\mathbf{a}_2 \end{bmatrix}=\begin{bmatrix} \mathbf{a}_0^\mathbf{T} \mathbf{a}_0 & \mathbf{a}_0^\mathbf{T} \mathbf{a}_1 & \mathbf{a}_0^\mathbf{T} \mathbf{a}_2\\ \mathbf{a}_1^\mathbf{T} \mathbf{a}_0 & \mathbf{a}_1^\mathbf{T} \mathbf{a}_1 & \mathbf{a}_1^\mathbf{T} \mathbf{a}_2\\ \mathbf{a}_2^\mathbf{T} \mathbf{a}_0 & \mathbf{a}_2^\mathbf{T} \mathbf{a}_1 & \mathbf{a}_2^\mathbf{T} \mathbf{a}_2 \end{bmatrix}=I $$
$$ \mathbf{A^T=A^{-1}} $$
P29
Matrix Transformation
A rotation can be represented by an orthogonal matrix.
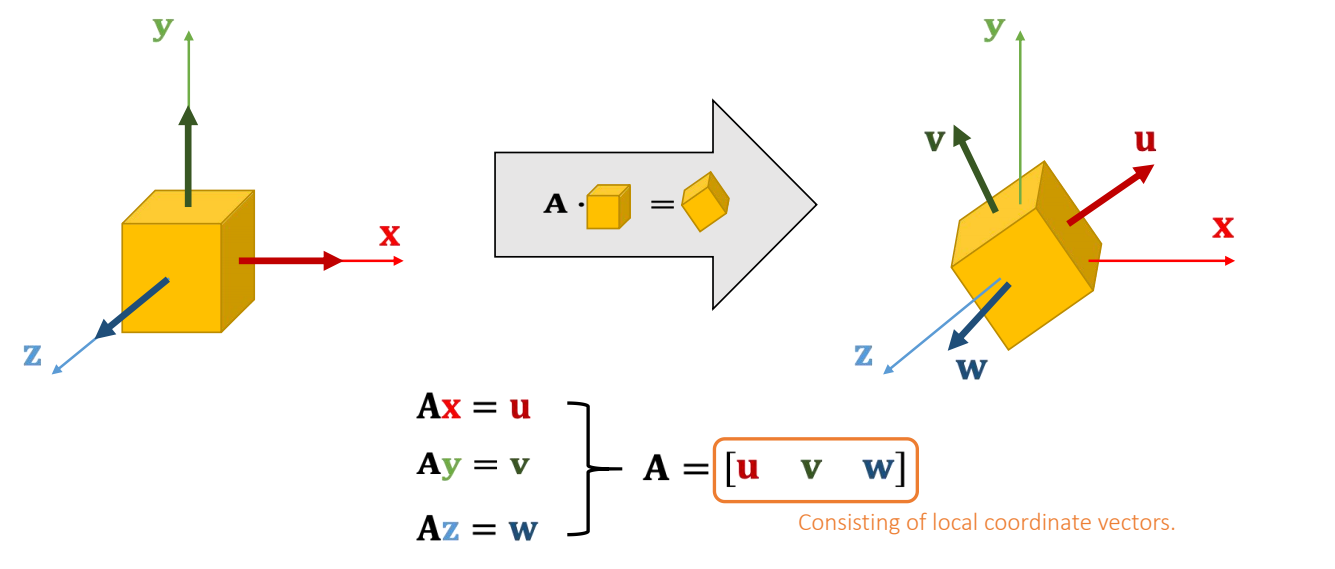
✅ \(\mathbf{x、y、z}\) 是世界坐标系、 \(\mathbf{u、v、w}\) 是局部坐标系,旋转矩阵是局部坐标系在世界坐标系中的状态的描述。
P30
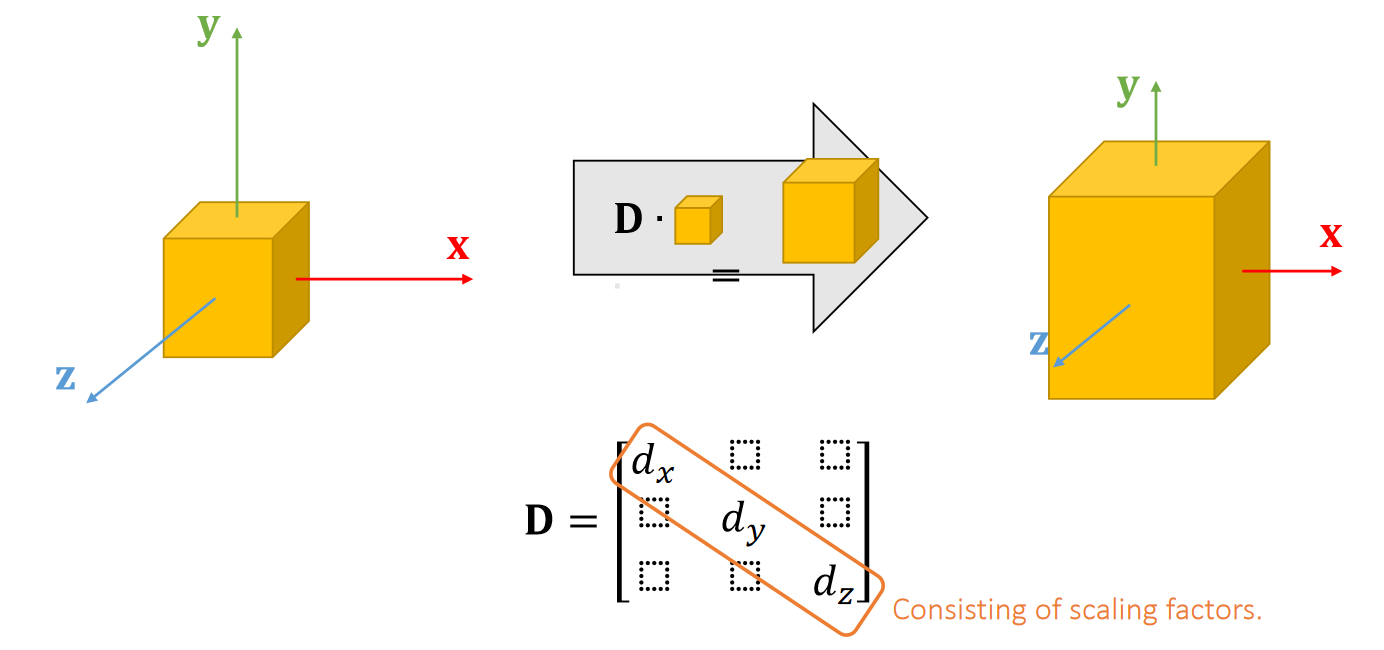
A scaling can be represented by a diagonal matrix.
P31
矩阵分解
Singular Value Decomposition
A matrix can be decomposed into:
\(\mathbf{A=UDV^T} \quad\)such that \(\mathbf {D}\) is diagonal,and \(\mathbf {U}\) and \(\mathbf {V}\) are orthogonal.
\(\quad \quad \quad \quad\quad\) D 的对角线元素是singular values(奇异值)
Any linear deformation can be decomposed into three steps: rotation, scaling and rotation:
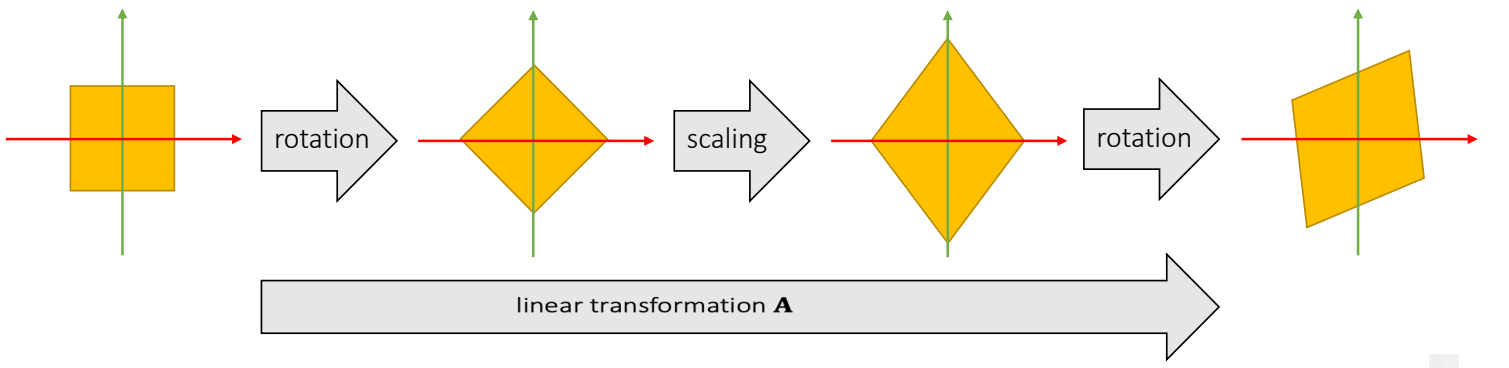
✅ rotation \(\longrightarrow\) scaling \(\longrightarrow\) rotation 分别对应 \(\mathbf{V}_2^\mathbf{T},\mathbf{D}, \mathbf{U}\). 注意顺序!!!
所有 \(\mathbf{A}\) 都能做 \(\mathbf{SVD} \)
P32
Eigenvalue Decomposition
A symmetric matrix can be decomposed into:
\(\mathbf{A=UDU^{-1}}\quad\)such that \(\mathbf {D}\) is diagonal,and \(\mathbf {U}\) is orthogonal.
\(\quad \quad \quad \quad\quad\) D 的对角线元素是eigenvalues(特征值)
✅ \(\mathbf{ED}\) 看作是\(\mathbf{SVD}\)的特例,仅应用于对称矩阵,此时 \(\mathbf{U=V}\)
\(\mathbf{U}\) 是正交矩阵,因此也可写成 \(\mathbf{A = UVU^T}\)
As in the textbook
Let \(\mathbf{U} =\begin{bmatrix} \cdots & \mathbf{u} _i &\cdots \end{bmatrix}\), we have:
$$ \mathbf{Au} _i= \mathbf{UDU^T} \mathbf{u} _i=\mathbf{UD} \begin{bmatrix} \vdots \\ 0\\ 1\\ 0\\ \vdots \end{bmatrix}=\mathbf{U} \begin{bmatrix} \vdots \\ 0\\ d_i\\ 0\\ \vdots \end{bmatrix}=d_i\mathbf{u} _i $$ \(\mathbf{U}\): 是 the eigenvector of \(d_i\)
\(d_i\): 是 eigenualue
We can apply eigenvalue decomposition to asymmetric matrices too, if we allow eigenvalues and eigenvectors to be complex. Not considered here.
✅ complex:复数
图形学不考虑虚数,因此也不考虑非对称矩阵的 \(\mathbf{ED}\)
P33
Symmetric Positive Definiteness (s.p.d.)
定义
\(\mathbf{A}\) is s.p.d. if only if: \(\quad\quad\quad\quad\quad\quad\quad\quad \) \(\mathbf{v^TAv}>0\), for any \(\mathbf{v} ≠ 0. \)
\(\mathbf{A}\) is symmetric semi-definite if only if: \(\quad\quad \) \(\mathbf{v^TAv}≥0\), for any \(\mathbf{v}≠ 0\).
✅ 计算矩阵的有限元或 Hession 时会用到正定性
| What does this even mean??? |
|---|
怎么理解SPD
\(d>0 \quad\quad\quad\quad\Leftrightarrow \quad \mathbf{v^T} d\mathbf{v} >0\), for any \(\mathbf{v} ≠ 0. \)
\(d_0, d_1,…>0 \quad\Leftrightarrow \quad \mathbf{v^TDv=v^T} \begin{bmatrix} \ddots & \Box & \Box\\ \Box & d_i & \Box\\ \Box &\Box &\ddots \end{bmatrix}\mathbf{v} >0\), for any \(\mathbf{v} ≠0.\)
✅ 一堆大于零的实数组成一个对角矩阵, 公式1的扩展
\(d_0, d_1,…>0 \quad\Leftrightarrow \quad \mathbf{v^T(UDU^T)v=v^TUU^T(UDU^T)UU^Tv}\)
\(\mathbf{U}\) orthogonal \(\quad\quad\quad\quad\quad\quad\quad\quad=\mathbf{(U^Tv)^T(D)(U^Tv)>0 } \), for any \(\mathbf{v} ≠0 \)
✅ 公式3是公式2的扩展
P34
怎么判断SPD
-
A is s.p.d. if only if all of its eigenvalues are positive:
\(\mathbf{A=UDU^T}\) and \(d_o,d_1,\cdots > 0.\) -
But eigenvalue decomposition is a stupid idea most of the time, since it takes lotsof time to compute.
✅ 实际上不会通过 \(\mathbf{ED}\) 来判断矩阵的正定性。因为ED的计算量很大。
- In practice, people often choose other ways to check if A is sp.d. For example,
\(a_{ii}>∑_{i≠j}|a_{ij}|\) for all \(i\)
A diagonally dominant matrix is p.d.
$$ \begin{bmatrix} 4&3 & 0\\ -1& 5 &3 \\ -8& 0 &9 \end{bmatrix}\begin{matrix}\quad\quad \quad4>3+0\\ \quad\quad\quad 5>1+3 \\ \quad\quad9>8 \end{matrix} $$
✅ 对角占优矩阵必定正定,正定不一定对角占优
- Finally, a s.p.d.matrix must be invertible:
$$ \mathbf{A^{-1} =(U^T)^{-1}D^{-1}U^{-1} = UD^{-1}U^T}. $$
P35
例子
Prove that if A is s.p.d., then \(\mathbf{B} =\begin{bmatrix} \mathbf{A} &\mathbf{-A} \\ \mathbf{-A} &\mathbf{A} \end{bmatrix}\)is symmetric semi-definite.
For any \( \mathbf{x}\) and \(\mathbf{y}\), we know:
$$ \begin{bmatrix} \mathbf{ x^T}&\mathbf{ y^T} \end{bmatrix}\mathbf{B}\begin{bmatrix} \mathbf{x} \\ \mathbf{y} \end{bmatrix}=\begin{bmatrix} \mathbf{ x^T}&\mathbf{ y^T} \end{bmatrix}\begin{bmatrix} \mathbf{A} &\mathbf{-A} \\ \mathbf{-A} &\mathbf{A} \end{bmatrix}\begin{bmatrix} \mathbf{x} \\ \mathbf{y} \end{bmatrix} $$
$$ \quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\mathbf{=x^TA(x-y)-y^TA(x-y)=(x-y)^TA(x-y)} $$
Since A is sp.d., we must have:
$$ \begin{bmatrix} \mathbf{ x^T} & \mathbf{y^T} \end{bmatrix}\mathbf{B} \begin{bmatrix} \mathbf{x} \\ \mathbf{y} \end{bmatrix}\ge 0 $$
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES103_mdbook/