P39
Shape Matching
先让每个粒子独立仿真,也不需要考虑弹簧力。
将每个面片的变形程度构建为能量,通过优化能量的方式使 Mesh 减少形变,所有面片以统一的方式进行优化,因此是一种全局优化方法。
所有方法最后都归结为一个分式:
$$ \psi(x)=k||x-y||_m^2+E(x) $$
关键是如何定义,以及非线性方程如何求解
P40
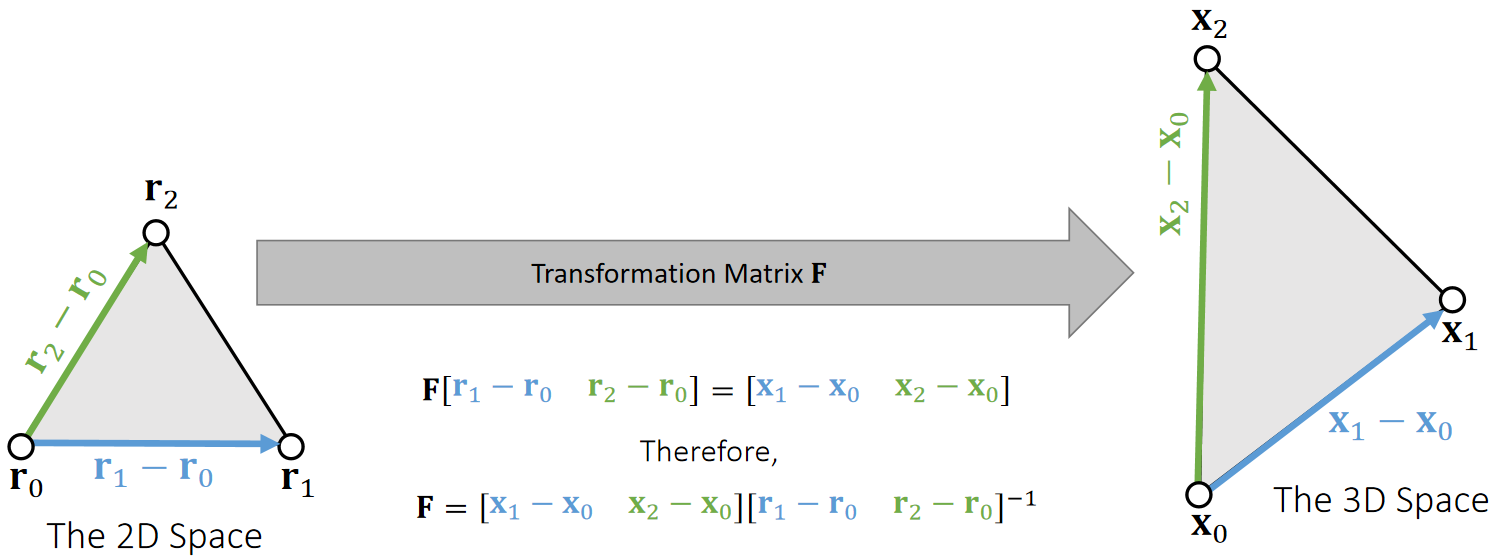
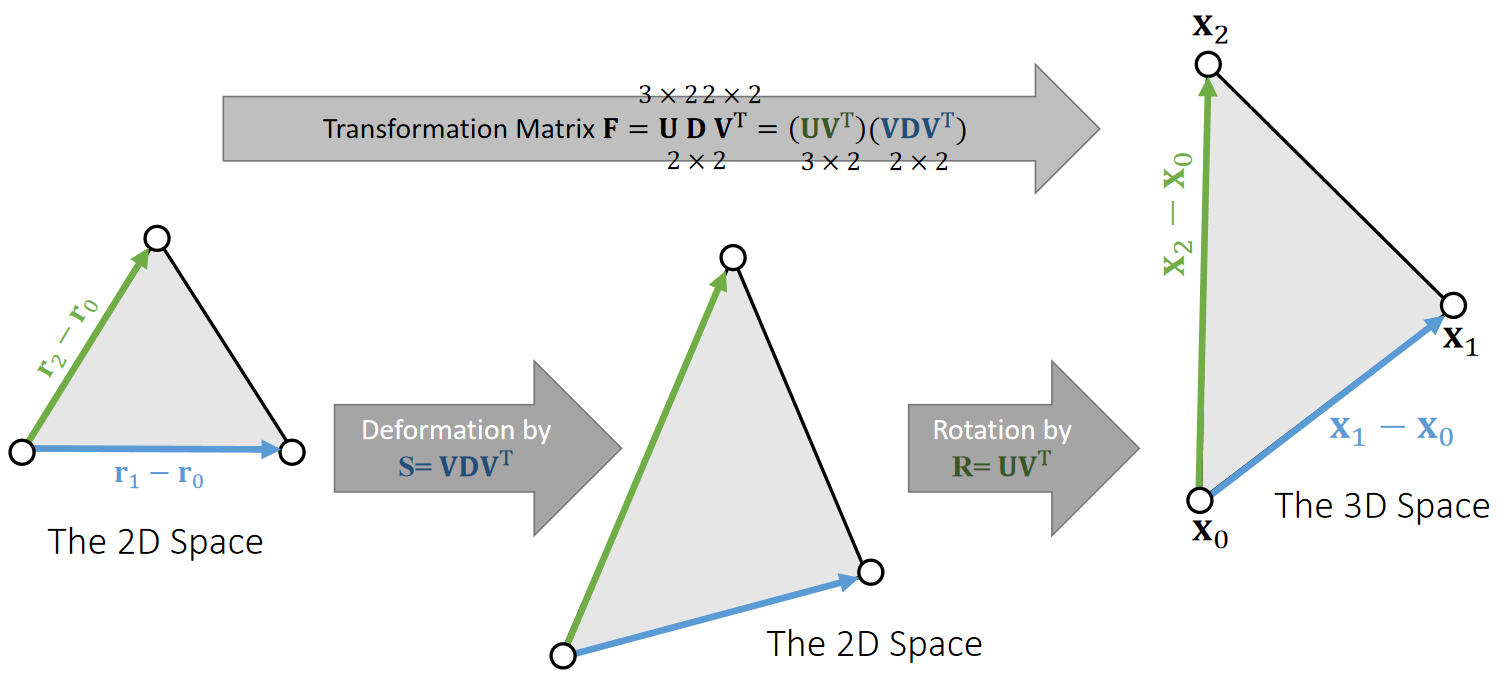
量化形变
The basic idea is to define a quadratic energy based on the rotated reference element. To do so, we split transformation into deformation + rotation.
P41
P42
计算能量
We can then define the quadratic energy as:
$$ E (\mathbf{x} )=\frac{1}{2}||\mathbf{F−R} ||^2 $$
(\(\mathbf{R}\) is the rotation inside of \(\mathbf{F}\). This energy tries to penalize the existence of \(\mathbf{S}\)).
Assuming that \(\mathbf{R}\) is constant, this \(E(\mathbf{x})\) becomes a quadratic function. We can then derive the force and the Hessian.
$$ E(\mathbf{x} ) =\frac{1}{2} ||\begin{bmatrix} \mathbf{x} _1-\mathbf{x} _0 &\mathbf{x} _2-\mathbf{x} _0 \end{bmatrix}\begin{bmatrix} \mathbf{r} _1-\mathbf{r} _0 &\mathbf{r} _2-\mathbf{r} _0 \end{bmatrix}^{−1}−\mathbf{R}||^2 $$
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES103_mdbook/