P34
Stable Constrained Dynamics
✅ 没有展开讲,见after reading中的论文
From a mass-spring system, we know spring Hessian (tangent stiffness) is:
$$
\mathbf{H} (\mathbf{x} )=∑_{e=(i,j)}\begin{bmatrix}
\Box & \Box & \Box & \Box \\
\Box & \mathbf{H} _e & -\mathbf{H} _e & \Box \\
\Box & -\mathbf{H} _e &\mathbf{H} _e & \Box \\
\Box & \Box & \Box & \Box
\end{bmatrix}
$$
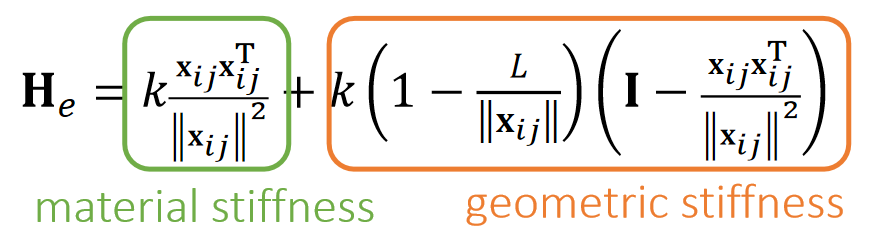
According to constrained dynamics:\(\mathbf{f} (\mathbf{x} )=\mathbf{J^Tλ}\) and \(\mathbf{λ} =−\mathbf{C} ^{−1}\mathbf{ϕ} \), so:

$$ \mathbf{J}_e=\frac{∂\phi _e}{∂\mathbf{x} }=\begin{bmatrix} \frac{\mathbf{x} _{ij}^\mathbf{T} }{||\mathbf{x} _{ij}||} & -\frac{\mathbf{x} _{ij}^\mathbf{T} }{||\mathbf{x} _{ij}||} \end{bmatrix} $$
P35
Stable Constrained Dynamics
According Lecture 5, Page 16, implicit integration is:
$$ (\frac{1}{∆t^2}\mathbf{M+H} (\mathbf{x} ^{[0]}))∆\mathbf{x} = \frac{1}{∆t^2}\mathbf{M} (∆t\mathbf{v} ^{[0]})+\mathbf{f} (\mathbf{x} ^{[0]}) $$
$$ \Downarrow $$
$$ (\mathbf{M} +∆t^2\mathbf{H} (\mathbf{x} ^{[0]}))\mathbf{v} ^{\mathrm{new} }= \mathbf{Mv} ^{[0]}+∆t\mathbf{f} (\mathbf{x} ^{[0]}) $$
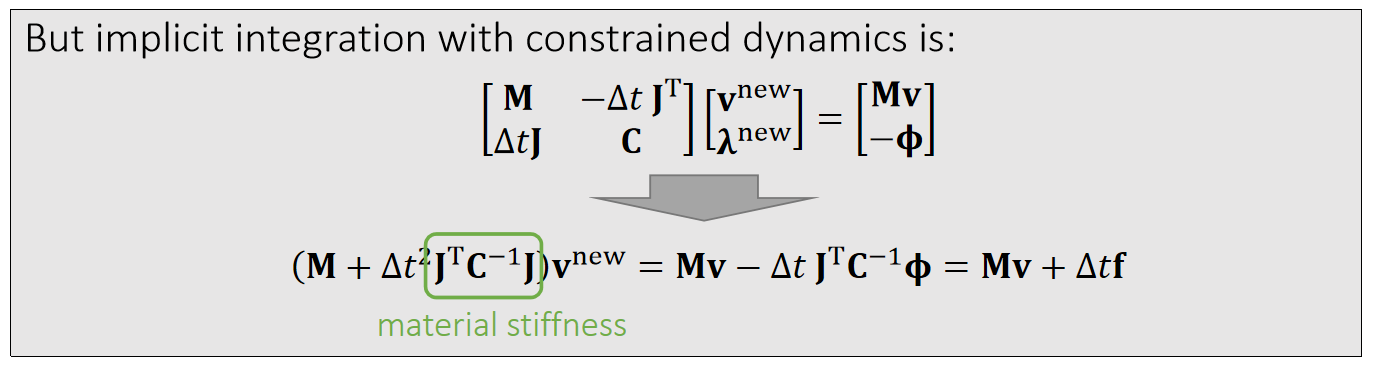
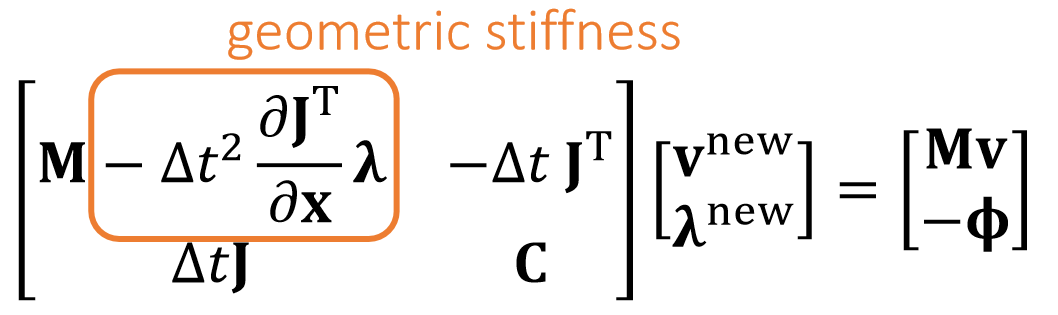
Missing geometric stiffness matrix here…
P36
After-Class Reading (optional)
Tournier et al. 2015. Stable Constrained Dynamics. TOG (SIGGRAPH).
✅ Method 2 Gauss 消元,如果把\(\lambda\)消掉,会得到一个基本上与隐式积分相似的公式,唯一的区别是\(\mathbf{H}\)上略有不同 —— 隐式积分多了一项。如果把用这一项加回去,会使constrain dynamic 变得稳定。
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES103_mdbook/