4D Gaussian Splatting for Real-Time Dynamic Scene Rendering
论文信息
- 作者: Guanjun Wu, Taoran Yi, Jiemin Fang, Lingxi Xie, Xiaopeng Zhang, Wei Wei, Wenyu Liu, Qi Tian, Xinggang Wang
- 单位: 华中科技大学、华为
- arXiv: 2310.08528
- 代码: https://guanjunwu.github.io/4dgs/
一句话总结
提出 4D Gaussian Splatting (4D-GS) 方法,通过结合 3D 高斯表示和 4D 神经体素,在单个 RTX 3090 GPU 上实现动态场景的实时渲染(最高 82 FPS)。
背景知识(让零基础也能看懂)
什么是"新视角合成"(Novel View Synthesis)?
想象你有一组从不同角度拍摄的照片,比如一个跳舞的人。你想看到这个人从侧面或背后看到的样子——但你没有拍过那些角度的照片。新视角合成的任务就是用 AI 生成这些"不存在"的视角图片。
这项技术在 VR/AR、电影特效等领域非常重要。
什么是"动态场景"?
普通的 3D 重建只能处理静止不动的场景(比如一座雕塑)。但现实世界中大多数场景都是动态的——人在走动、物体在运动。
动态场景的难点在于:不仅要重建空间信息,还要捕捉时间维度上的变化。
什么是 NeRF?
NeRF (Neural Radiance Fields) 是 2020 年提出的一种革命性方法,用神经网络来隐式表示 3D 场景。它的工作原理是:
- 将 3D 空间中的每个点 $(x, y, z)$ 映射到颜色和密度
- 使用体素渲染(Volume Rendering)技术从任意视角"合成"图像
问题:NeRF 训练很慢(通常需要几小时甚至几天),渲染也很慢(每秒只能渲染几张图),无法实时应用。
什么是 3D Gaussian Splatting (3D-GS)?
2023 年提出的 3D Gaussian Splatting 是一种更高效的方法:
- 用高斯分布(Gaussian)来表示 3D 场景中的点
- 用可微分的泼溅(Differentiable Splatting)技术直接将 3D 高斯投影到 2D 平面
- 不需要耗时的体素渲染,可以实时渲染
但 3D-GS 只适用于静态场景,无法处理动态内容。
什么是 4D?
我们平时说的 3D 是三维空间 $(x, y, z)$。加上时间维度 $t$,就是 4D。
所以 "4D 场景" = "3D 空间 + 时间变化"
核心问题
现有的方法存在以下问题:
- NeRF 类方法:训练慢、渲染慢,无法实时
- 3D-GS:只能处理静态场景
- 扩展 3D-GS 到动态场景:需要在每个时间点都构建一套 3D 高斯,存储成本呈线性增长(时间越长,存储越多)
核心挑战:如何在保持实时渲染能力的同时,处理动态场景?
方法详解
核心思想
不是为每个时间点都存储一套完整的 3D 高斯,而是:
- 维护一套canonical(标准)3D高斯
- 用一个变形网络来描述高斯如何随时间移动和变形
这样,存储成本就与时间无关了!
方法流程图
graph TB
subgraph Input
G[原始3D高斯 G]
t[时间戳 t]
end
subgraph "时空结构编码器 H"
G --> |"中心坐标 X"| R1["多分辨率HexPlane R(i,j)"]
t --> |"时间信息"| R1
R1 --> |"体素特征"| MLP["小型MLP φd"]
end
MLP --> |"融合特征 fd"| D["多头高斯变形解码器 D"]
subgraph "多头解码器"
D --> |"fd"| DX["ΔX 位置变形"]
D --> |"fd"| DR["Δr 旋转变形"]
D --> |"fd"| DS["Δs 缩放变形"]
end
DX --> |"X + ΔX"| GX["变形后的位置 X'"]
DR --> |"r + Δr"| GR["变形后的旋转 r'"]
DS --> |"s + Δs"| GS["变形后的缩放 s'"]
GX --> |"X', r', s', α, C"| SG["变形后的3D高斯 G'"]
SG --> |"可微分泼溅"| Output["渲染图像 I"]
关键技术 1:时空结构编码器 (Spatial-Temporal Structure Encoder)
灵感来自 HexPlane/K-Planes 方法,将 4D 神经体素分解为 6 个 2D 平面:
- 空间平面:$(x,y)$, $(x,z)$, $(y,z)$
- 时空平面:$(x,t)$, $(y,t)$, $(z,t)$
每个 3D 高斯的位置 $(x,y,z)$ 和时间 $t$ 可以在这些平面中查询到对应的特征。
关键技术 2:多头高斯变形解码器 (Multi-head Gaussian Deformation Decoder)
变形包括三个部分:
- 位置变形 $\Delta X$:高斯移动到新位置
- 旋转变形 $\Delta r$:高斯朝向改变
- 缩放变形 $\Delta s$:高斯大小/形状改变
变形公式: $$\left( X', r', s' \right) = \left( X + \Delta X, r + \Delta r, s + \Delta s \right)$$
关键技术 3:两阶段优化
- Warm-up 阶段(前 3000 次迭代):只用静态 3D 高斯训练
- 完整训练:开启完整的 4D 变形学习
这样做的好处是让动态部分的学习更稳定。
实验结果
性能对比(合成数据集)
| 方法 | PSNR (dB) | SSIM | 训练时间 | FPS | 存储 (MB) |
|---|---|---|---|---|---|
| TiNeuVox-B | 32.67 | 0.97 | 28 min | 1.5 | 48 |
| K-Planes | 31.61 | 0.97 | 52 min | 0.97 | 418 |
| 3D-GS | 23.19 | 0.93 | 10 min | 170 | 10 |
| Ours (4D-GS) | 34.05 | 0.98 | 8 min | 82 | 18 |
关键优势:
- 最高渲染质量(PSNR 最高)
- 极快的渲染速度(82 FPS 实时)
- 合理的训练时间(8 分钟)
- 紧凑的存储(18 MB)
视觉效果对比
从左到右:Ours、TiNeuVox、Ground Truth、K-Planes、HexPlane、3D-GS
可以看到 4D-GS 渲染的图像最接近 Ground Truth(真实图像)。

优化过程:从随机初始化的 3D 高斯逐渐学习到正确的结果。
技术细节
3D 高斯的数学表示
一个 3D 高斯由以下属性定义:
- 位置 $X \in \mathbb{R}^3$:高斯的中心点
- 颜色 $C$:用球谐函数 (SH) 系数表示
- 不透明度 $\alpha \in \mathbb{R}$:控制透明度
- 旋转 $r \in \mathbb{R}^4$:用四元数表示
- 缩放 $s \in \mathbb{R}^3$:三个方向的缩放因子
高斯的形状由协方差矩阵 $\Sigma$ 决定: $$\Sigma = RS S^T R^T$$
其中 $R$ 是旋转矩阵,$S$ 是缩放矩阵。
渲染公式
对于每个像素,渲染颜色 $C$ 的公式: $$C = \sum_{i \in N} c_i \alpha_i \prod_{j=1}^{i-1}(1 - \alpha_j)$$
这里 $N$ 是覆盖该像素的有序高斯集合,$c_i$ 和 $\alpha_i$ 是每个高斯的颜色和不透明度。
损失函数
$$\mathcal{L} = \left| \hat{I} - I \right| + \mathcal{L}_{tv}$$
- $\left| \hat{I} - I \right|$:L1 颜色损失
- $\mathcal{L}_{tv}$:基于网格的总变差损失(来自 K-Planes)
应用场景
1. 单目动态场景渲染
从一段视频中重建整个动态场景,可以从任意角度观看。
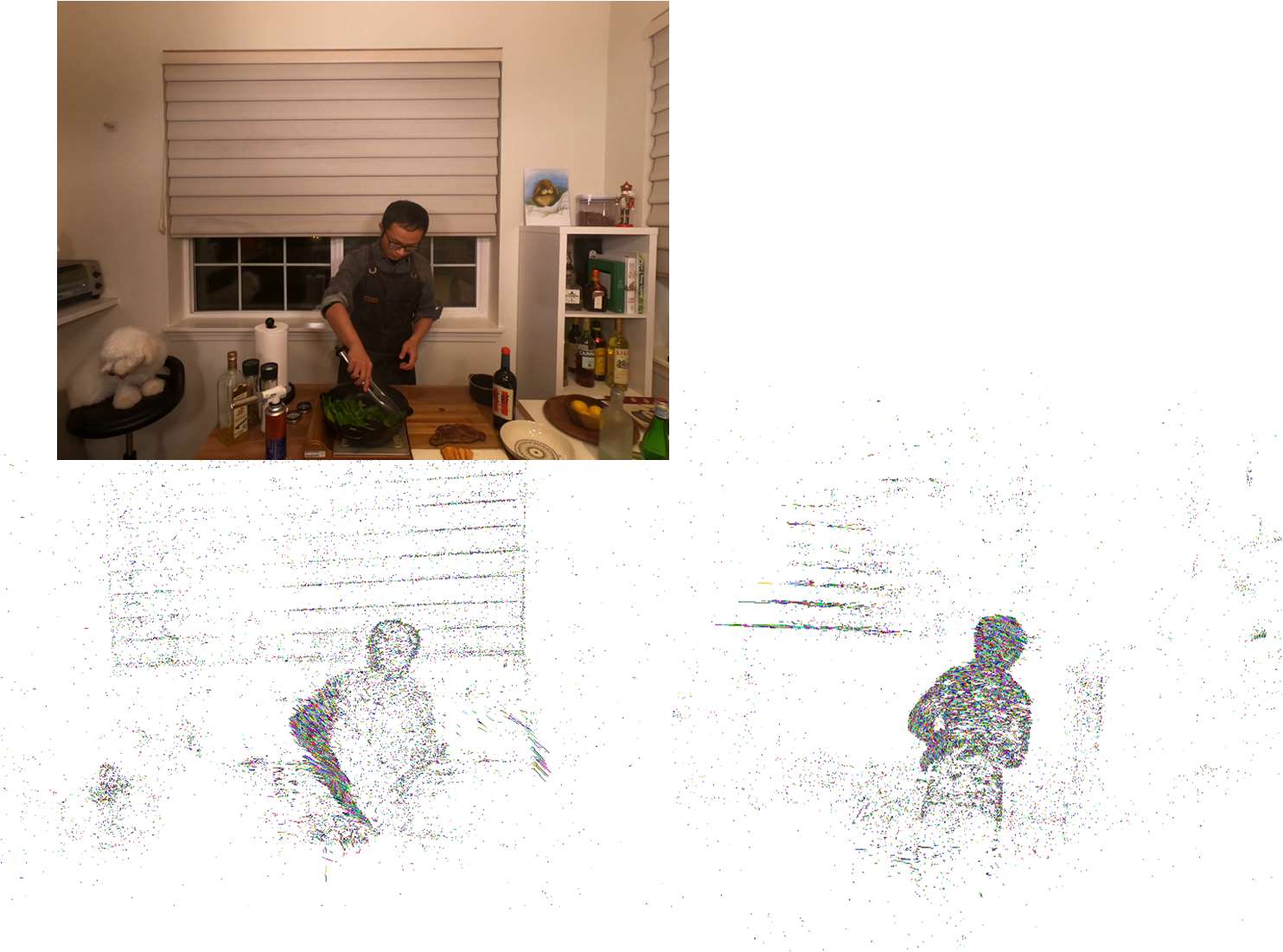
2. 3D 跟踪
跟踪场景中物体的 3D 运动轨迹:
![]()
3. 4D 编辑
对动态场景进行编辑,添加新物体或修改场景:

性能分析
FPS 与高斯数量的关系
当 3D 高斯数量少于 30,000 时,渲染速度可达 90 FPS。
这为实际应用提供了很好的参考:
- 简单场景 → 高 FPS
- 复杂场景 → 降低 FPS 但保持质量
局限性与未来工作
当前局限
- 大运动:对于运动幅度很大的场景,训练困难
- 缺少背景点:如果没有足够的背景点,效果下降
- 相机位姿不准确:影响重建质量
- 单目设置下的动静分离:静态和动态物体难以自动分离
- 大规模场景:城市级重建需要更紧凑的算法
未来方向
- 更好的动静分离方法
- 更紧凑的表示以支持大规模场景
- 与其他编辑工具的结合
总结
4D-GS 的核心贡献:
- 提出了一个高效的 4D 高斯泼溅框架,在单一 GPU 上实现实时动态场景渲染
- 设计了 时空结构编码器,用多分辨率 HexPlane 连接相邻高斯
- 开发了 多头变形解码器,分别预测位置、旋转、缩放变形
- 在多个数据集上达到 SOTA 质量,同时保持 82 FPS 的实时渲染能力
为什么重要:
- 首次将 3D-GS 的实时渲染能力扩展到动态场景
- 为 VR/AR、电影制作等应用提供了实用方案
- 开源代码,促进社区发展
参考
如果你想深入学习,建议按以下顺序阅读:
- NeRF (Mildenhall et al., ECCV 2020) - 理解隐式场景表示的基础
- 3D Gaussian Splatting (Kerbl et al., SIGGRAPH 2023) - 理解高斯泼溅基础
- HexPlane/K-Planes - 理解时空特征编码
- 4D-GS (本文) - 理解如何结合两者
本笔记由 AI 自动生成,如有疏漏请指正。