Humans in 4D: Reconstructing and Tracking Humans with Transformers
核心问题是什么?
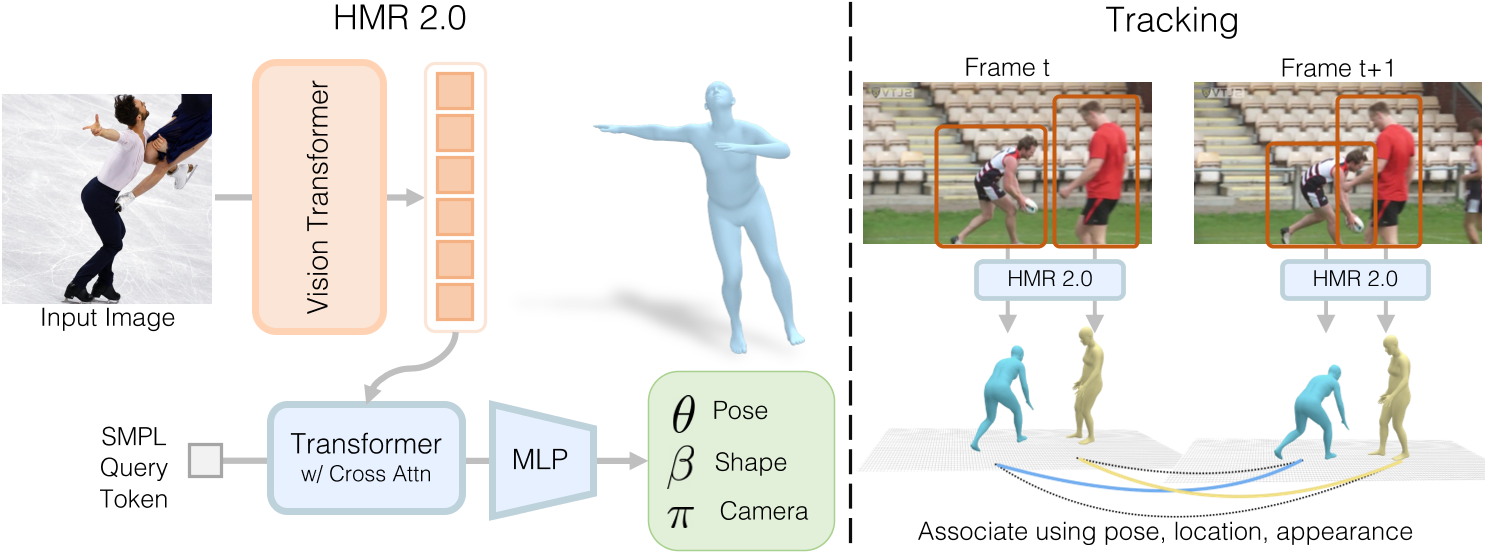
我们提出了一种重建人类并随着时间的推移追踪他们的方法。
Human Mesh Recovery:我们提出了一个用于人类mesh reconvery的完全“transformer”的网络版本。该网络 HMR 2.0 可以从单个图像中进行人体重建。
Human Tracking:以 HMR 2.0 的 3D 重建作为以 3D 运行的跟踪系统的输入,使得我们可能在多人场景及遮挡场景中保持身份。
核心贡献是什么?
-
HMR 2.0:这是一个完全基于Transformer的架构,用于从单张图像中恢复人体网格。它不依赖于特定领域的设计,但在3D人体姿态重建方面超越了现有方法。
-
4DHumans:这是一个建立在HMR 2.0基础上的系统,可以联合重建和跟踪视频中的人体。它在PoseTrack数据集上实现了最先进的跟踪结果。
-
动作识别:通过在AVA v2.2数据集上的动作识别任务,展示了HMR 2.0在3D姿态估计方面的改进,最终为AVA基准测试贡献了最先进的结果(42.3 mAP)。
大致方法是什么?
Reconstructing People
模型结构
| 输入 | 输出 | 方法 |
|---|---|---|
| 视频 | 图像 | cv2 |
| 图像 | 人物的bbox | VitDet |
| Image | image tokens | ViT-H/16 |
| a single (zero) input token, image tokens | 3D rotations | a standard transformer decoder [74] with multi-head self-attention |
class SMPLTransformerDecoderHead(nn.Module):
""" HMR2 Cross-attention based SMPL Transformer decoder
"""
def __init__(self, ):
super().__init__()
transformer_args = dict(
depth = 6, # originally 6
heads = 8,
mlp_dim = 1024,
dim_head = 64,
dropout = 0.0,
emb_dropout = 0.0,
norm = "layer",
context_dim = 1280,
num_tokens = 1,
token_dim = 1,
dim = 1024
)
# a standard transformer decoder [74] with multi-head self-attention
self.transformer = TransformerDecoder(**transformer_args)
dim = 1024
npose = 24*6
# Transformer生成的是latent code,使用MLP把latent code转为实际的信息
self.decpose = nn.Linear(dim, npose)
self.decshape = nn.Linear(dim, 10)
self.deccam = nn.Linear(dim, 3)
# MLP层的常用权重初始化方法
nn.init.xavier_uniform_(self.decpose.weight, gain=0.01)
nn.init.xavier_uniform_(self.decshape.weight, gain=0.01)
nn.init.xavier_uniform_(self.deccam.weight, gain=0.01)
mean_params = np.load('data/smpl/smpl_mean_params.npz')
init_body_pose = torch.from_numpy(mean_params['pose'].astype(np.float32)).unsqueeze(0)
init_betas = torch.from_numpy(mean_params['shape'].astype('float32')).unsqueeze(0)
init_cam = torch.from_numpy(mean_params['cam'].astype(np.float32)).unsqueeze(0)
self.register_buffer('init_body_pose', init_body_pose)
self.register_buffer('init_betas', init_betas)
self.register_buffer('init_cam', init_cam)
def forward(self, x, **kwargs):
batch_size = x.shape[0]
# vit pretrained backbone is channel-first. Change to token-first
x = einops.rearrange(x, 'b c h w -> b (h w) c')
init_body_pose = self.init_body_pose.expand(batch_size, -1)
init_betas = self.init_betas.expand(batch_size, -1)
init_cam = self.init_cam.expand(batch_size, -1)
# Pass through transformer
# 使用a single (zero) input token来解码
token = torch.zeros(batch_size, 1, 1).to(x.device)
token_out = self.transformer(token, context=x)
token_out = token_out.squeeze(1) # (B, C)
# Readout from token_out
# 不输出绝对信息,而是相对于第一帧的信息
pred_pose = self.decpose(token_out) + init_body_pose
pred_shape = self.decshape(token_out) + init_betas
pred_cam = self.deccam(token_out) + init_cam
return pred_pose, pred_shape, pred_cam
Loss
- SMPL参数Loss
- 3D keypoint重建loss
- 2D keypoint重建loss
- SMPL参数的差别器loss
Tracking People
- 逐帧检测各个帧中的人物,将它们“lifting”到 3D,提取它们的 3D 姿势、3D 空间中的位置(来自估计的相机)和 3D 外观(来自纹理贴图)。
- 随着时间的推移,构建出每个人的tracklet representation。
- 针对每个tracklet,预测下一帧中人的姿势、位置和外观(全部以 3D 形式进行)。
- 在这些自上而下的预测(来自第3步)和该帧中人的自下而上的检测(来自第1步)之间找到最佳匹配。
- 更新tracklet representation并迭代该过程。
有效
缺陷
验证
-
数据集和基线:使用标准的H3.6M、MPI-INF3DHP、COCO和MPII数据集进行训练,并使用InstaVariety、AVA和AI Challenger作为额外数据,其中生成了伪地面真实拟合。
-
实验:作者们在多个数据集上定性和定量地评估了他们的重建和跟踪系统。首先,他们展示了HMR 2.0在标准2D和3D姿态精度指标上超越了以前的方法。其次,他们展示了4DHumans是一个多才多艺的跟踪器,实现了最先进的性能。最后,他们通过在动作识别的下游应用中展示优越的性能,进一步证明了恢复姿态的鲁棒性和准确性。
-
模型设计:在开发HMR 2.0的过程中,作者们探索了一系列设计决策,包括不同的模型架构、训练数据的影响、ViT预训练的影响以及SMPL头部架构的影响。
启发
遗留问题
参考材料
- https://shubham-goel.github.io/4dHumans/.