Implicit Warping for Animation with Image Sets
NVIDIA
核心问题是什么?
摘要
这与现有方法不同,我们的框架的挑选能力有助于它在多个数据集上实现最先进的结果,这些数据集使用单个和多源图像进行图像动画。
https://deepimagination.cc/implicit-warping/
目的
用 driving 视频中的动作来 warp reference 图像中的角色,以实现视频驱动图像的视频生成任务。
现有方法:
要实现大幅度的运动,就需要借助大的光流,才能获得远处的特征。
.
.
.
.
现有方法及局限性
现有方法使用显式基于光流的方法进行动画,该方法设计用于使用单个源,不能很好地扩展到多个源。
.
.
.
.
本文方法
我们提出了一种新的隐式图像动画框架,使用一组源图像通过驱动视频的运动进行传输。使用单个跨模态注意力层在源图像和驱动图像之间找到对应关系,从不同的源图像中选择最合适的特征,并扭曲所选特征。
.
.
.
.
效果
在单 reference 和多 reference 场景中都达到了 SOTA.
.
.
.
.
核心贡献是什么?
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
大致方法是什么?
- 找出 source和driving 的 dense correspondence
- 基于 dense corresponence 的 warp.
作者认为一个CA可以完成 1 和 2. 称其为 impicit warping
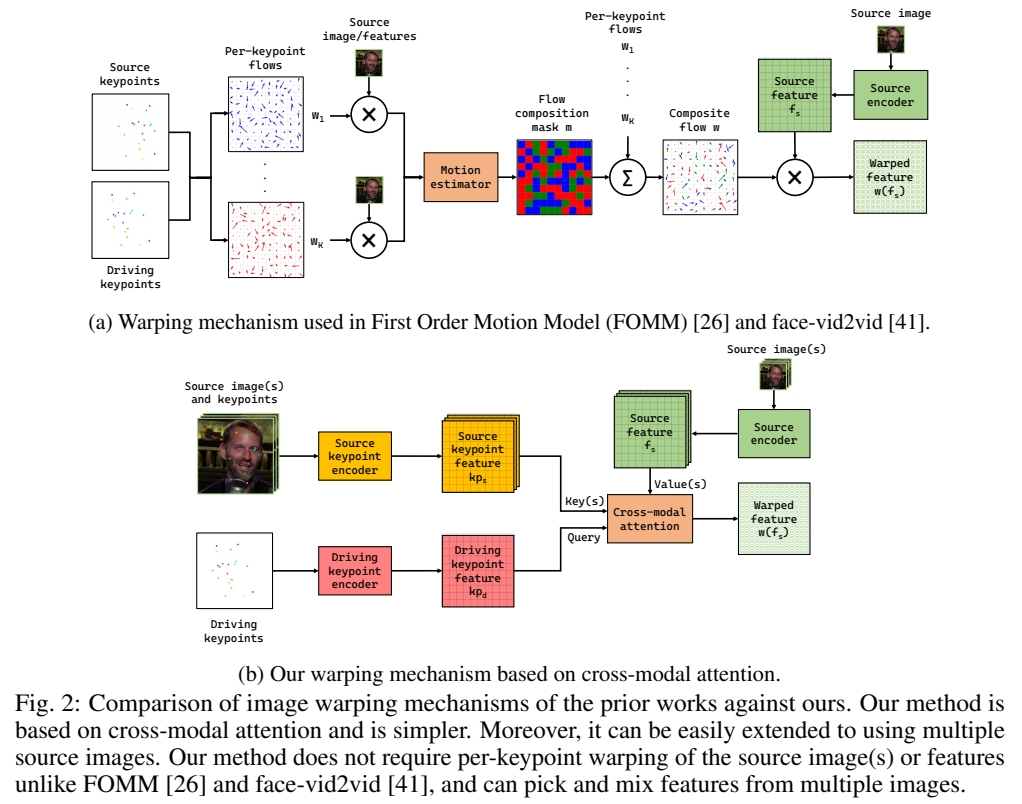
不需要显式地提取光流,Q 和 K 的相似度描述了隐式的光流。

构造 Q. K .V
K: Source keypoint feature
Q: driving keypoint feature
V: Source image feature
Q 的构造:

spatial keypoint 表示,[:,:,i] 为以第i个 keypoint 位置为中心,特定均值和方差的二维一通道高斯。
Strength: 描述关键点的可见性。
K 的构造:
K 和 Q 和构造过程相同,区别在于UNet 的输入,concat (scaled spatial keypoint 表示,source Image)
优势:把所有 keypoints 表示到一张图像上,后面的模块与 keypoint 的个数无关。
V 的构造:

Q、K、V 在空间上是对应的。
CA 存在的问题:所有的 key 与 query 都相似度不高时,也会从 key 中选择一个 Score 最高的 key 对应的 value,但这个 value 可能并不合适,或者选择任何一个 value 都不合适。例如张嘴时要生成牙齿。
解决方法:
- 增加额外的 KV
- 使用 dropout 随机丢弃 KV 来鼓励使用额外的 KV
这个方法对 “warp 方法缺少生成能力”的问题有一定弥补作用
[❓] 怎么制作额外的 KV? 每一对 KV 代表一个 Source Image 上的一个 Keypoints.
此处能对 KV 做 drop out,是因为 CA 把所有的 KV 看作是集合,不能应用于 Conv. 因为conv 是有位置关系的。
crsss - modal attention
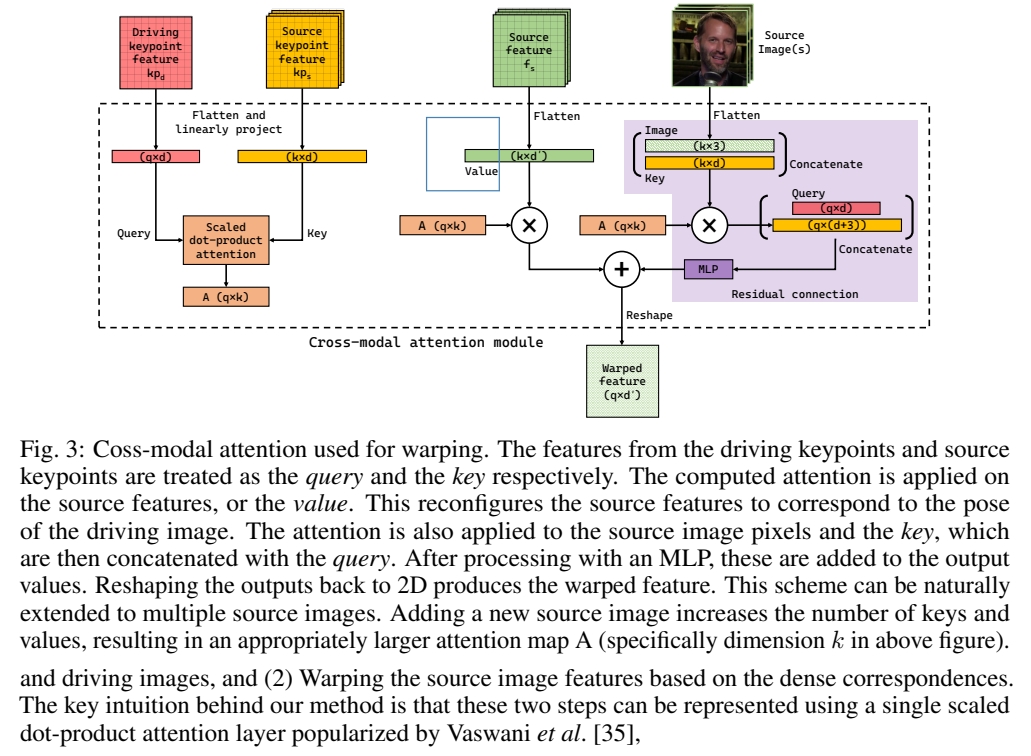
Q: q\(\times \)d, K: k\(\times \)d,V: k\(\times \)d'
$$ \begin{align*} q& =kps-num\\ K& =kps-num\cdot ref-num+add-num \end{align*} $$
$$ \begin{matrix} Q=Q+PE, &\\ K=K+PE &\\ A=\text{Softmax} (\frac{Q\cdot K^\top }{C}), & q\times k \\ \text{output feature} =A\cdot V,& q\times d{}' & \end{matrix} $$
$$ \text{residual feature} = MLP(\text{concat}(A \cdot \text{concat(pixel} , K),Q)) $$
$$ \text{warped feature = output feature + residual feature} $$
目的:除了用 A warp 了 V,还 warp 了原图和 key,用于提取 skew, rotation 等“对 V 做加权平均”难以学到的信息,可提升生成质量和颜色一致性。
效率提升:1- D attention layer , spatial-reduction attention
.
.
.
.
.
.
.
训练
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
数据集
TalkingHead-1kH
VoxCeleb2
TED Talk
评价指标
生成图像质量:PSNR,L1,LPIPS,FID
运动相似度:AKD (average keypoint distance)
MKR(missing keypoint ratio)
.
.
.
.
.
.
loss
- GAN Loss(参考face-vidzvid)
- perceptual loss (参考 VCG-19)
- equivariance loss (参考 FoMM)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
训练策略
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
实验与结论
实验1: 横向对比,单 reference
.
.
.
.
.
.
.
.
.
效果1:
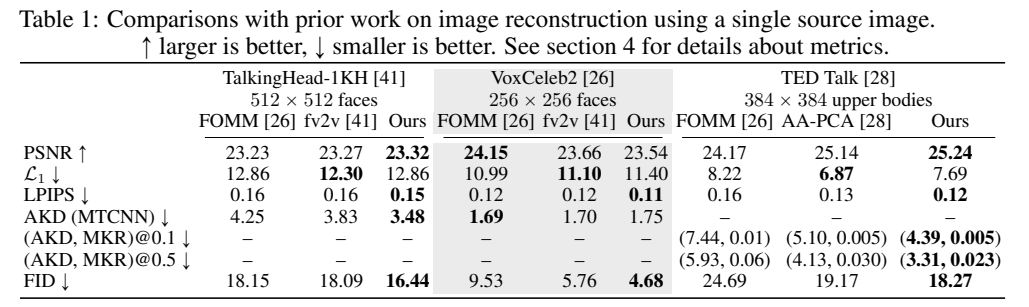
结论1: 3 的生成质量更高且与动作一致性更好。
效果2:
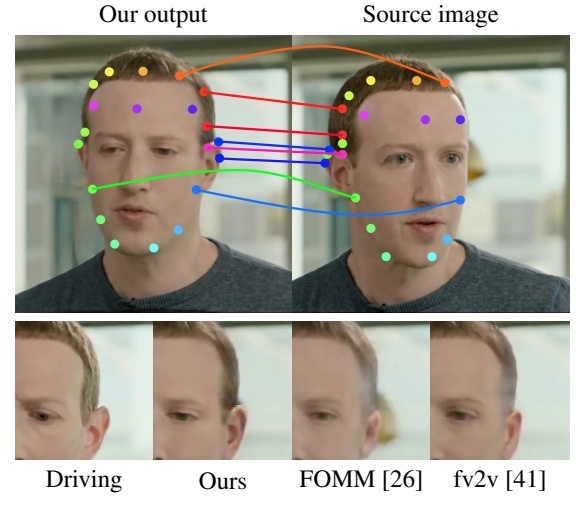
结论2:
3 所使用的 attention 是 global 的,因此可以从空间上距离较远的位置提取特征,但显式光流的方法,需要借助较大的光流才能获得远处的特征。
实验2: 横向对比,多 reference
- FOMM (face,upper body)
- AA- PCA (upper body)
- 本文方法
- fv2v(face)
1,2,4 不支持多 source Image 因此分别用每个 source Image 做 warping, 并在 Warp feature map 上做平均。
效果:
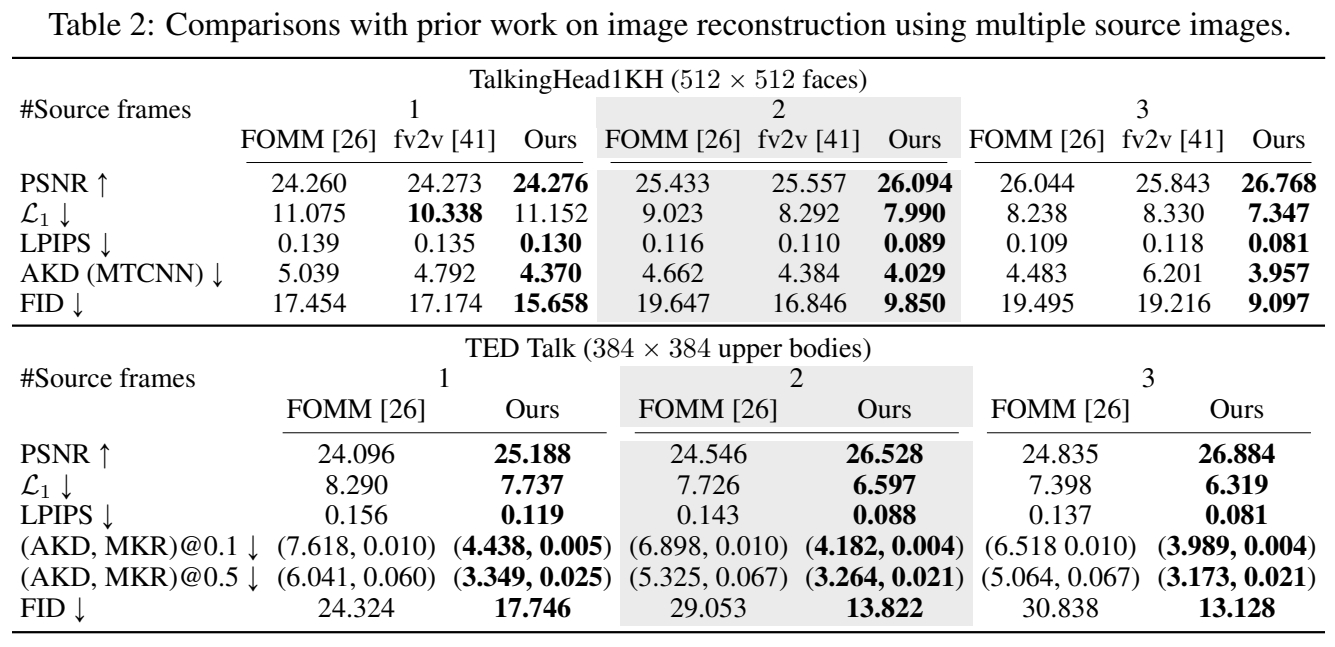
Source Image 为少于 180 帧的连续帧序列。
结论: 随着 Source image 数量的增加,3 的效果会更好,而1、2、4 的效果会更差。
分析: 用同一 pose warp 不同的 image,得到的结果之间会有 misalignment. 但 1、2 不知道该选取哪个 warp 结果。而 3 使用 global attention 从所有 source 中提取信息。
实验3: Ablation
- 无 residual 分支,无 Extra KV
- 引入 residual 分支
- 引入 Extra KV
效果:
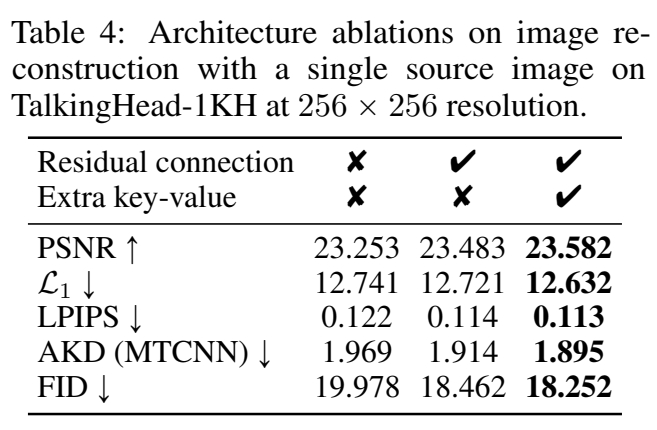
结论: 残差结构与额外的 K/V 对结果都有提升。
实验4: 可视化 strength
效果:
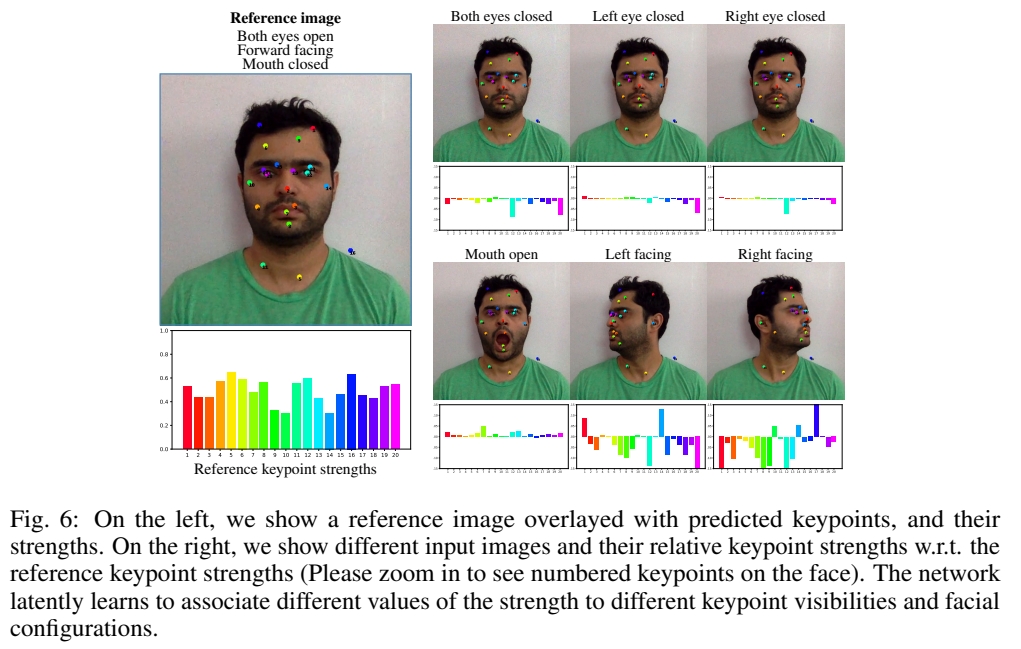
[❓] 怎样预测 Strength?
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
有效
.
.
.
.
.
.
.
.
.
.
.
.
局限性
缺少生成能力,例如给背面生成正面,生成极端表情等。
.
.
.
.
.
.
.
.
.
.
.
.
.
.
启发
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
遗留问题
- 如何预测 Strength?
- 如何构造 extra KV?
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
相关工作
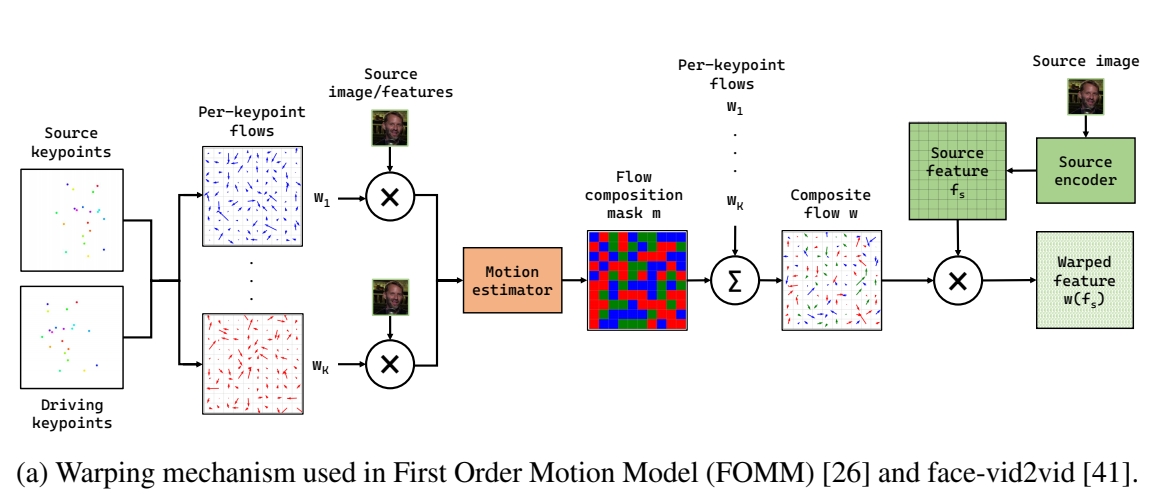
source/target 表示为:2D keypoints, Jacobian Matrics
Warp 的过程:每个 source/target keypoint 对生成
一个对 source Image Warp 的光流。再用 motion estimator 模块把这些光流合并成 Composite flow. 用 Composite flow warp reference Image
以上方法存在的问题:
- 每个 keypoint 求个光流,时间复杂度与 keypont 的个数成正比
- 当有多个 reference Image 时,每个 reference 会生成一个对应的 composite flow 和 output Image,如何将结果合并?average 会导致 blurry,heuristic to choose 会导致flicker.
参考材料
https://deepimagination.cc/implicit-warping/