GaussiAnimate: Reconstruct and Rig Animatable Categories with Level of Dynamics
- 作者: Jiaxin Wang, Dongxin Lyu, Zeyu Cai, Zhiyang Dou, Cheng Lin, Anpei Chen, Yuliang Xiu (西湖大学)
- 机构: Westlake University, Nanjing University, HKU, MUST
- 会议: arXiv 2604.08547 (Apr 2026)
- 代码: cookmaker.cn/gaussianimate
1. 研究背景与问题
核心问题
如何让 3DGS 重建的动态角色具备可操控的动画能力——从 "reconstruction for replay" 转向 "reconstruction for reanimation"?
控制力 vs. 形变精度的本质矛盾
| 需求 | 内层(控制) | 外层(表现) |
|---|---|---|
| 目标 | 紧凑、刚性的运动学骨架 | 高保真、非刚性表面形变 |
| 适用表示 | 层次化骨架 (SMPL 等) | Free-form bones / blobs |
| 典型例子 | 关节旋转驱动 | 衣物褶皱、软组织形变 |
现有方法的局限:
- 基于模板的方法 (SMPL, SMAL):依赖预定义骨架,无法泛化到新类别
- Bag-of-Bones (BANMo):缺少运动学约束,拓扑不正确
- RigGS:将骨架提取与渲染耦合,优化慢(~2小时 vs 本文~15分钟)
- CAMM:依赖首帧骨架初始化,缺乏运动自适应性
本文方法:Skelebones(骨架-骨骼脚手架蒙皮系统)
提出 Scaffold-Skin Rigging System,显式建模 Level of Dynamics:
- 内层:运动学骨架(Kinematic Skeleton)→ 捕捉低频刚性关节运动
- 外层:自由骨骼(Free-form Bones)→ 表示高频非刚性表面形变
- 绑定:PartMM(部件级运动匹配)→ 骨架驱动骨骼

2. 方法总览
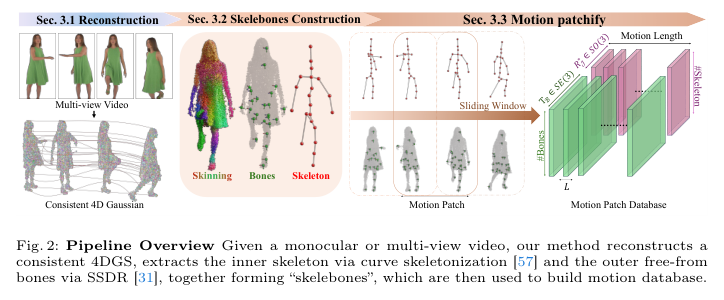
整体流程分为三个阶段:
输入视频(单目/多视)
↓
[阶段1] 重建(Sec 3.1)
Deformable 3DGS + ARAP 正则化 → 时序一致的 4D 高斯序列
↓
[阶段2] Skelebones 构建(Sec 3.1 + 3.2)
运动聚类 + SSDR → 外层 Bones
MCS 骨架化 + 关节检测 + IK → 内层 Skeleton
↓
[阶段3] PartMM 绑定与动画(Sec 3.3)
构建运动数据库 → 部件级匹配 + 对齐 + 粗到细细化 → 新姿态动画
3. 阶段一:时序一致的 4D 高斯重建
3.1 Deformable 3DGS
采用 SC-GS 的框架,用 MLP 形变场 $D_{\text{MLP}}(f)$ 将 canonical 高斯 $\mathcal{G}_c$ 变形到第 $f$ 帧 $\mathcal{G}_f$:
$$\mathcal{G} _f ^{(\cdot)} = \mathcal{G} _c ^{(\cdot)} + D _{\text{MLP}} ^{(\cdot)}(f), \quad (\cdot) \in {\mu, c, \sigma, q, s}$$
📖 参考笔记:SC-GS 的详细内容参见 234(Sparse-Controlled Gaussian Splatting,CVPR 2024)。核心思路是用稀疏控制点 + MLP 形变场将 canonical 高斯映射到各帧,GaussiAnimate 直接借用了这一 deformable 建模框架。
设计选择:使用各向同性高斯(而非各向异性),牺牲少量渲染质量以换取对新姿态更好的泛化能力(following RigGS)。
训练损失:光度损失(L1 + D-SSIM):
$$\mathcal{L} _{\text{photo}} = \sum _{f=1} ^{F} \left[(1-\lambda)|I _f - \hat{I} _f|_1 + \lambda(1 - \text{D-SSIM}(I _f, \hat{I} _f))\right]$$
3.2 局部刚性正则化(ARAP)
为了满足后续 SSDR 对时序一致性的要求,引入 ARAP 约束 + 距离保持约束:
$$\mathcal{L} _{\text{rigid}} = \sum _{(i,j)\in K} \left[ \underbrace{|(x _f ^i - x _f ^j) - R _i(x _c ^i - x _c ^j)|_2 ^2} _{\text{ARAP 项}} + \underbrace{(|x _f ^i - x _f ^j|_2 - |x _c ^i - x _c ^j|_2) ^2} _{\text{距离保持项}} \right]$$
其中 $R_i \in SO(3)$ 通过 SVD 从协方差矩阵计算得到。$K_m$ 为第 $m$ 个聚类的 KNN 邻域集合。
ARAP 的作用:抑制高斯点的过度变形,使后续运动聚类更稳定,骨骼结构更连贯。
3.3 运动聚类
📖 参考笔记:LBG-VQ 运动聚类的详细内容参见 236(Robust and Accurate Skeletal Rigging from Mesh Sequences, SIGGRAPH 2014,Le & Deng)。本文直接采用其运动感知聚类策略,将高斯点按运动相似性分组为刚性簇。
基于 Gestalt 共同命运定律——具有相似运动的元素被视为同一组——采用 LBG-VQ(Linde-Buzo-Gray Vector Quantization)将高斯点分组为刚性聚类。
- 输入:所有帧的高斯点位置 ${\mathcal{G}f}{f=1}^F$
- 输出:每帧每聚类的刚性变换 $\hat{T}_B \in SE(3)^{F \times B}$
- 聚类数量 $B$ 通过从粗到细的分裂细化过程自动确定(最大 50)
💡 为什么只借用 236 的聚类,而不使用其完整的绑定流程?
236 的完整绑定流程(拓扑重建 MST、迭代权重更新、关节约束优化、骨骼剪枝)是为网格(Mesh)设计的,严重依赖三角面片的邻接拓扑关系。而 3DGS 是无拓扑的点云表示,没有面片连接信息,因此 236 中依赖拓扑的步骤(如边权重计算、刚性拉普拉斯正则化)无法直接移植。
LBG-VQ 运动聚类是 236 中唯一纯运动驱动的步骤——它只看每个点的位移轨迹是否相似,不依赖任何拓扑信息,因此可以无缝适配到 3DGS 上。
3.4 SSDR 皮肤分解
📖 参考笔记:SSDR 的详细内容参见 235(Smooth Skinning Decomposition with Rigid Bones, SIGGRAPH 2012)。该方法从示例姿态中自动提取 LBS 参数(骨骼变换 + 皮肤权重),本文直接借用该算法作为后处理步骤,将运动聚类结果压缩为稀疏的 LBS 表示。
用 SSDR(Smooth Skinning Decomposition with Rigid Bones)拟合 LBS 参数:
- 输入:运动聚类得到的初始刚体变换 $\hat{T}_B$
- 输出:
- 皮肤权重 $W \in \mathbb{R}^{N \times B}$($N$ 个高斯、$B$ 个骨骼)
- 优化后的骨骼变换 $T_B \in SE(3)^{F \times B}$
这步将密集的 4D 变形压缩为稀疏的刚体骨骼变换,近似非刚性表面动力学,形成 Skelebones 的外层 Bones。
235(SSDR, SIGGRAPH 2012)和 236(Le & Deng, SIGGRAPH 2014)出自同一作者组,是同一研究路线的两篇递进工作:
236 可以看作是 235 的"加强版",补齐了自动确定骨骼数量和拓扑的能力。但 236 的迭代绑定和拓扑重建依赖网格拓扑,无法在 3DGS 上直接使用。
本文的选用策略:从 236 取其"分组能力"(LBG-VQ 运动聚类,确定骨骼数量和初始变换),从 235 取其"求解能力"(块坐标下降 + 闭式 SVD 精确求解 LBS 参数)。两者拼成一条适配 3DGS 无拓扑场景的管道:
[236] LBG-VQ 聚类 → 初始刚体变换 T̂_B(骨骼分组 + 初始化) ↓ (不运行 236 的拓扑重建、迭代绑定、剪枝) [235] SSDR → 皮肤权重 W + 优化后的骨骼变换 T_B(LBS 参数精炼)内层运动学骨架的拓扑则由本文原创的 MCS 曲线骨架 + 皮肤权重梯度关节检测方案生成,与 236 的 MST 拓扑重建无关。
4. 阶段二:内层运动学骨架提取
外层 bones 虽然能捕捉表面变形,但缺乏解剖学对应关系,无法直观操控。因此需要提取内层运动学骨架。
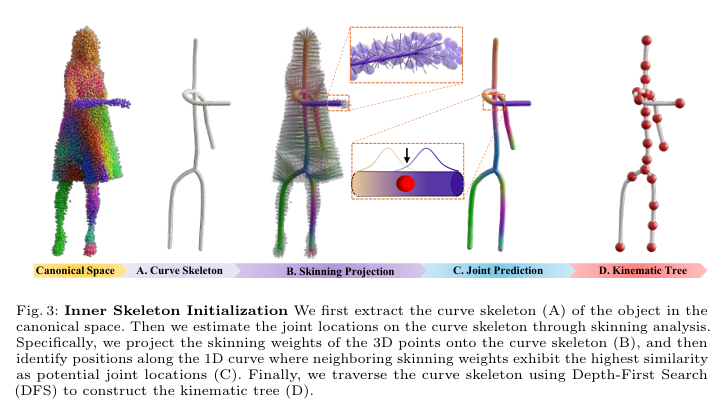
4.1 Mean Curvature Skeleton 提取
从 canonical 形状 $\mathcal{G}_c$(取第 0 帧)直接提取 Mean Curvature Skeleton (MCS),记为 $\mathcal{S}$。
选择 MCS 而非 MAT 的原因:
- MAT 对表面噪声敏感,容易产生虚假分支
- MCS 提供直接的表面-骨架对应关系,便于后续将 SSDR 皮肤权重投影到骨架上
4.2 基于皮肤权重梯度的关节检测
核心观察:解剖学关节处,皮肤权重 $W$ 会出现急剧的空间变化。
$$\mathcal{J} = { s _j \in \mathcal{S} \mid \nabla W(s _j) > \tau }$$
- $\mathcal{S} = {s_j \in \mathbb{R}^3 \mid j = 1, \ldots, M}$:曲线骨架的离散点集
- $\nabla W(s_j)$:骨架点 $s_j$ 处的皮肤权重梯度
- $\tau = 0.3$:权重变化的阈值
具体过程:
- 将 3D 高斯点的 SSDR 皮肤权重投影到曲线骨架上
- 沿一维曲线骨架计算权重的空间梯度
- 梯度超过阈值的点即为关节候选
4.3 运动学树构建
将检测到的关节组织为树状结构 $T = (\mathcal{J}, A)$:
- 保留边:保留与曲线骨架空间对齐的边
- 确定父子关系:从根关节(距全局质心最近的关节)出发,DFS 遍历
- 输出:稀疏骨架表示 ${\mathcal{J}, E}$,$E \subset \mathcal{J} \times \mathcal{J}$ 编码关节间的边
Part 的定义:运动学树中两个关节之间的一段骨骼即为一个 Part。每个 Part 有对应的骨骼子集 $\mathcal{B}'$。实际中划分为 5 个重叠的 Part。
4.4 骨骼姿态优化(IK)
通过逆运动学求解每帧的局部关节旋转 $R_\mathcal{J} = {R_j}_{j=1}^J$,最小化:
$$R _\mathcal{J} ^* = \arg\min _{R _\mathcal{J}} \sum _{f=1} ^{F} \left[ \mathcal{L} _{\text{CD}}(\mathcal{J} _c(R _\mathcal{J}), \mathcal{S} _f) + \lambda , \mathcal{L} _{\text{L2}}(\mathcal{G} _c(R _\mathcal{J}), \mathcal{G} _f) \right]$$
- 第一项:Chamfer 距离,使变形后的骨架关节与每帧的曲线骨架对齐
- 第二项:L2 距离,使前向运动学变形后的高斯与观测高斯一致
4.5 渐进式骨架优化
随着更多运动帧被观测,骨架质量渐进提升:
- 少量帧 → 粗糙骨架,可能遗漏细节
- 更多帧 → 接触更丰富的姿态和变形 → 更准确的运动聚类 → 更好的骨架结构
- 关键特性:骨架从运动观测中"自然涌现"(motion-adaptive)
5. 阶段三:PartMM(部件级运动匹配)
重要纠正:PartMM 不是基于 MLP 的概率加权绑定,而是一个非参数化的运动匹配(Motion Matching)算法,灵感来自 motion retargeting 的 KV 检索思想。
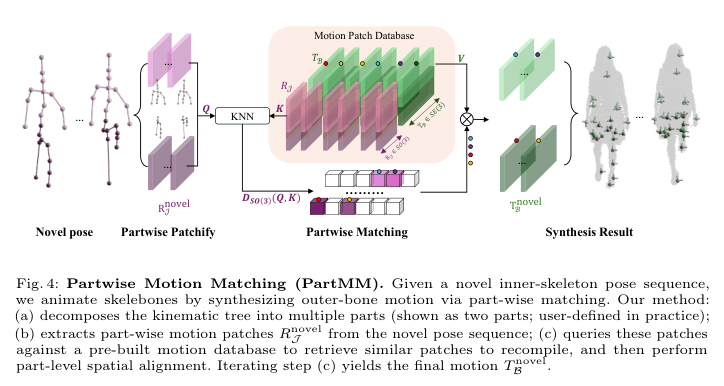
5.1 问题定义
已知:
- 内层关节旋转 $R_\mathcal{J} \in SO(3)^{F \times J}$
- 外层骨骼变换 $T_B \in SE(3)^{F \times B}$
- 皮肤权重 $W \in \mathbb{R}^{N \times B}$
问题:给定新的骨架姿态 $R_\mathcal{J}^{\text{novel}}$,如何合成对应的外层骨骼运动 $T_B^{\text{novel}}$?
核心困难:外层 free-form bones 与内层 kinematic skeleton 之间没有显式对应关系,无法直接映射。
5.2 KVQ 检索框架
将骨骼绑定转化为非参数化的 patch 匹配问题:
| 角色 | 含义 | 空间 |
|---|---|---|
| Query (Q) | 目标骨架运动(新姿态) | $SO(3)$ 关节旋转空间 |
| Key (K) | 源骨架运动(数据库中) | $SO(3)$ 关节旋转空间 |
| Value (V) | 源骨骼运动(数据库中) | $SE(3)$ 骨骼变换空间 |
5.3 运动分片(Motion Patchifying)
从重建的 Skelebones 序列中提取运动片段,构建源运动数据库:
$$\mathcal{D} _{\text{src}} = {\mathcal{P} _l \mid \mathcal{P} _l = (R _\mathcal{J} ^l, T _B ^l), ; l = 1, \ldots, L}, \quad L = F - p + 1$$
- $p = 7$:默认分片大小(7 帧一个 patch)
- 每个分片同时包含骨架旋转和骨骼变换的配对数据
5.4 部件级匹配与对齐
这是 PartMM 的核心创新——在 Part 级别而非全局进行匹配。
对于每个运动学 Part $\mathcal{J}'$(对应骨骼 Part $\mathcal{B}'$):
Step 1: KNN 检索(在 $SO(3)$ 空间)
$$\mathcal{P} ^{\text{match}} = \arg\min _{\mathcal{P} _l \in \mathcal{D} _{\text{src}}} d _{SO(3)}(R _{\mathcal{J}'} ^{\text{novel}}, R _{\mathcal{J}'} ^l)$$
- $d_{SO(3)}$:旋转流形上的测地距离
- $k = 7$:取 7 个最近邻
- 关键:每个 Part 独立匹配,允许跨 Part 灵活重组运动片段
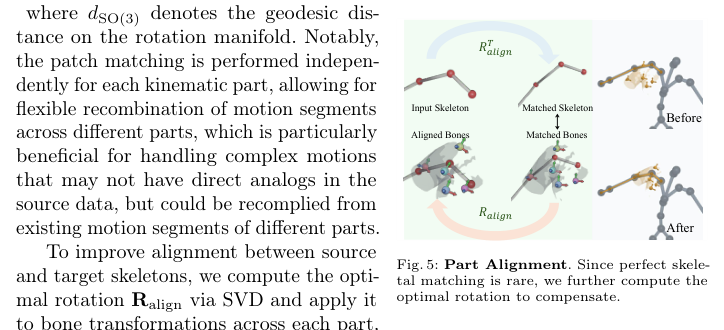
Step 2: SVD 刚性对齐
由于完美匹配很少,计算最优旋转 $R_{\text{align}}$(via SVD)来补偿源-目标骨架的旋转差异:
$$T _{\mathcal{B}'} ^{\text{aligned}} = R _{\text{align}} \circ T _{\mathcal{B}'} ^{\text{match}}$$
5.5 粗到细细化
通过运动金字塔进行多尺度细化:
$$T _{\mathcal{B}'} ^{\ell+1} = (1 - \lambda _\alpha) , T _{\mathcal{B}'} ^{\ell} + \lambda _\alpha , \bar{T} _{\mathcal{B}'} ^{\ell}$$
- 每层 $\ell$ 下采样率 $2^{5-\ell}$(共 5 层金字塔)
- $\lambda_\alpha = 0.7$:混合权重
- $\bar{T}_{\mathcal{B}'}^{\ell}$:该层匹配分片的加权平均
从粗尺度到细尺度迭代混合,确保平滑的时间过渡和几何合理性。
5.6 PartMM 伪代码
输入: R_query (新骨架运动), D_src (运动数据库), parts (Part 分组)
输出: T_out (新骨骼运动)
T_out = {}
for part in parts:
Q = R_query[part] # Query: 该 Part 的新骨架旋转
K = D_src[part].R # Key: 该 Part 的数据库骨架旋转
V = D_src[part].T # Value: 该 Part 的数据库骨骼变换
idx = knn_match(Q, K, k=7) # SO(3) 空间 KNN 检索
K_match = K[idx]
V_match = V[idx]
R_align = svd_align(Q, K_match) # SVD 对齐
V_aligned = bmm(R_align, V_match) # 对齐后的骨骼变换
T_out[part] = blend(V_aligned) # 混合输出
return T_out
5.7 PartMM vs 其他绑定方式
| LBS | BoB | MLP/GRU | PartMM | |
|---|---|---|---|---|
| 绑定方式 | 皮肤权重传递 | 骨骼袋 + 网络驱动 | 神经网络回归 | 非参数化运动匹配 |
| 变换类型 | 刚体(线性) | 刚体(LBS) | 非线性 | 复用数据库中的变换 |
| 泛化能力 | 关节处伪影严重 | 依赖模板 | 姿态外推退化 | 强(尤其低数据量) |
| 需要训练 | 否 | 是 | 是 | 否(training-free) |
| 新姿态处理 | 插值 | 网络推理 | 外推 | 检索+混合 |
| 计算开销 | 极低 | 中等 | 推理 | 极低(匹配+对齐) |
6. 实验结果
6.1 新视角合成(Table 2)
| 方法 | Rig | D-NeRF PSNR/SSIM/LPIPS | DG-Mesh PSNR/SSIM/LPIPS | 时间 |
|---|---|---|---|---|
| SC-GS | No | 43.04/0.998/0.007 | 38.96/0.993/0.014 | ~1hr |
| AP-NeRF | Yes | 30.94/0.970/0.035 | 31.83/0.967/0.046 | >1day |
| RigGS | Yes | 40.82/0.996/0.011 | 37.65/0.991/0.017 | ~2hrs |
| Ours | Yes | 41.00/0.996/0.015 | 37.59/0.990/0.022 | ~15min |
关键优势:解耦范式(rigging 与渲染分离)使得优化时间从 RigGS 的 ~2小时 降至 ~15分钟。
6.2 新姿态动画(Table 3 - 几何评估)
| 方法 | VTO T-shirt/Dress RMSE | D4D Animals RMSE |
|---|---|---|
| Robust LBS | 33.7/52.2 | 65.3 |
| Ours_MLP | 23.9/36.8 | 68.8 |
| Ours_GRU | 22.9/37.5 | 58.4 |
| FullMM | 38.2/37.0 | 53.3 |
| PartMM | 17.4/36.7 | 54.6 |
6.3 新姿态动画(Table 4 - 渲染评估)
| 方法 | DNA-Rendering PSNR/SSIM/LPIPS | ActorHQ PSNR/SSIM/LPIPS |
|---|---|---|
| D3DGS (GT) | 32.16/0.978/0.033 | 30.56/0.938/0.136 |
| SMPL+LBS | 0.948/0.049 | 17.54/0.738/0.315 |
| SMPL+BoB | 0.935/0.057 | 16.66/0.722/0.259 |
| SMPL+PartMM | 0.964/0.039 | 24.26/0.850/0.182 |
核心数字:
- vs LBS:+17.3% PSNR(DNA-Rendering)
- vs BoB:+21.7% PSNR(ActorHQ,实际 +45.6%)
- vs Robust LBS:48.4% RMSE 改进(VTO)
- vs MLP/GRU:>20% RMSE 改进
6.4 定性比较
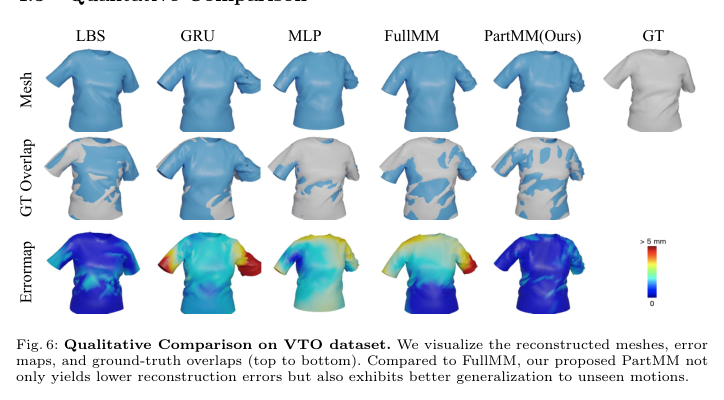
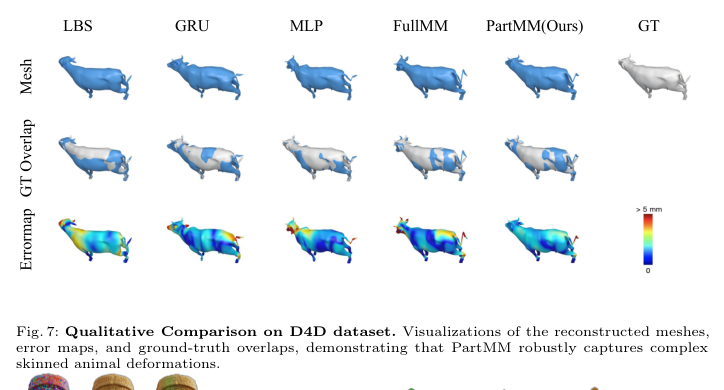
PartMM 在衣物(VTO)和动物(D4D)上均能稳健捕捉复杂的蒙皮变形。
6.5 消融实验
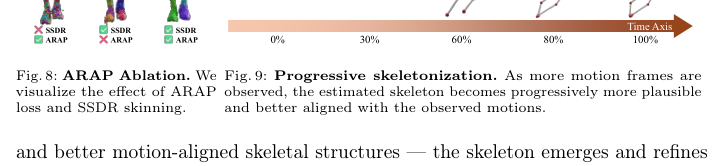
ARAP 的作用:
- 无 ARAP → 高斯点变形过度 → 运动聚类不稳定 → 骨骼结构碎片化
- 有 ARAP + 无 SSDR → 过密的骨骼集 → 碎片化皮肤权重 → 骨架退化
- 有 ARAP + 有 SSDR → 连贯的骨骼结构 + 平滑的皮肤权重
渐进式骨架化:
- 观测帧越多 → 接触更多姿态 → 更准确的运动聚类和皮肤权重 → 骨架从运动中自然涌现并逐步完善
7. 与现有方法的全面对比(Table 1)
| 方法 | 绑定方式 | Template Free | Motion Adaptive | Topology Correct | Non-rigid Dynamic |
|---|---|---|---|---|---|
| Robust | Skeleton | Yes | Yes | No | No |
| TAVA | Skeleton | No | No | Yes | No |
| BANMo | Skeleton | No | Yes | Yes | No |
| CAMM | Skeleton | Yes | No | No | No |
| AP-NeRF | Skeleton | Yes | No | No | No |
| WIM | Skeleton+Bones | Yes | Yes | No | No |
| SC-GS | Skeleton | Yes | No | No | Yes |
| DressRecon | SMPL+Bones | No | No | Yes | Yes |
| RigGS | Skeleton+Bones | Yes | Yes | No | Yes |
| CANOR | Bones | Yes | No | No | Yes |
| Ours | Skelebones | Yes | Yes | Yes | Yes |
GaussiAnimate 是唯一同时满足全部五个属性的方法。
8. 实现细节
- D_MLP:8 层 MLP,特征维度 256
- 重建训练:40,000 迭代,单张 RTX 4090D,~15 分钟(Adam)
- 后处理(训练无关):运动聚类 + SSDR + 骨架化 + PartMM,共 ~2 分钟
- 运动聚类:最大骨骼数 50,骨架化阈值 $\tau = 0.3$
- PartMM 匹配:5 个重叠 Part,KNN $k=7$,5 层金字塔,分片大小 $p=7$
9. 局限性与未来方向
- 计算性能:尚未达到实时,但数据库构建可通过神经压缩 / neural SSDR 加速
- 骨架提取敏感性:依赖皮肤权重质量和 canonical 形状精度,复杂衣物(如裙子)的髋关节定位可能偏差
- 渲染伪影:新姿态下可能因高斯覆盖不足出现空洞,可通过 mesh-based 渲染或 image-space refinement 解决
10. 核心贡献总结
| 贡献 | 内容 |
|---|---|
| 表示 (Skelebones) | 骨架-骨骼脚手架蒙皮系统,显式建模 Level of Dynamics,平衡控制力与形变精度 |
| 算法 (PartMM) | 非参数化部件级运动匹配,training-free,低数据量下强泛化 |
| 框架 (GaussiAnimate) | 完全自动的系统,从 4DGS 重建到稳健重动画,template-free,支持人/衣物/动物 |
11. 与知识库的关联
3DGSAnimation
- Skeleton Agent 类别的首篇条目
- Skelebones 表示 = 内层骨架 + 外层骨骼,填补了 "无代理" 和 "物理仿真代理" 之间的空白
- PartMM 的非参数化匹配思路可作为方法论标杆
GAMES105 — Skinning
- 直接对比并超越 LBS(Skinning 核心内容)
- SSDR 将非刚性形变压缩为 LBS 系统 → 本质上仍是 LBS 框架
- PartMM 不是 LBS 的替代,而是骨架到骨骼的绑定方式的替代
关键区别
- 之前笔记将 PartMM 错误描述为 "MLP 概率加权绑定",实际是非参数化运动匹配算法
- PartMM 不涉及 MLP 残差、softmax 概率或 affinity loss
- 骨骼变形仍通过 LBS($T_B$ + 皮肤权重 $W$),PartMM 解决的是如何从新骨架姿态得到 $T_B$
Reference
- arXiv: 2604.08547
- PDF: ReadPapers/220