PFNN: Phase-Functioned Neural Networks for character control
研究背景与问题
当前方法及存在的问题
- 传统数据驱动方法(如 Motion Matching):依赖海量动捕数据,运行时最近邻检索成本高、内存占用大,复杂环境下泛化能力弱,需要大量人工预处理。
- 自回归模型(RNN/LSTM/ERD):虽适配实时场景,但长序列运动生成会出现误差累积,导致动作「逐渐消失」「噪声爆炸」、角色漂浮、姿态僵硬等伪影,且静止起步时存在相位歧义问题。
- CNN 类模型:属于离线框架,需要提前输入完整的控制序列,无法适配游戏中玩家实时输入的动态交互场景。 基于物理的控制方法:可控性极差,调参难度极高,难以同时保证动作自然度和实时响应性。
- 同时,传统动捕数据均在平地采集,无法支撑角色在复杂地形的运动生成,也是行业的核心瓶颈之一。
本文主要创新点
- 架构创新:相位函数神经网络(PFNN) 首次将运动相位从「网络输入特征」升级为「网络权重的全局参数化变量」,通过周期相位函数动态计算每帧的网络权重,从根源上避免了不同相位的动作混合,彻底解决了自回归模型的误差累积问题,同时保证了相位对运动的强影响力,不会出现传统方法中相位信息被稀释的问题。
- 数据创新:动捕 - 环境耦合的训练数据流水线 提出了一套全自动的动捕数据与虚拟环境高度图适配方案,从游戏引擎场景中提取高度图,通过误差函数匹配与网格编辑,将平地动捕数据与复杂地形耦合,生成了400 万条带环境信息的训练数据点,让模型学会了根据地形自动调整动作。
主要方法
flowchart LR NN1 & NN2 & NN3 & NN4 & 相位 --> 混合专家模型 混合专家模型 & 前一帧状态 & 目标(轨迹位置 / 方向 / 高度) & 步态语义标签 --> 推理输出 推理输出 --> 当前帧状态 & 未来轨迹 & 触地信息 & 相位变化量 相位变化量 --> 相位 触地信息 -->|IK| 动作输出 当前帧状态 & 未来轨迹 --> 动作输出
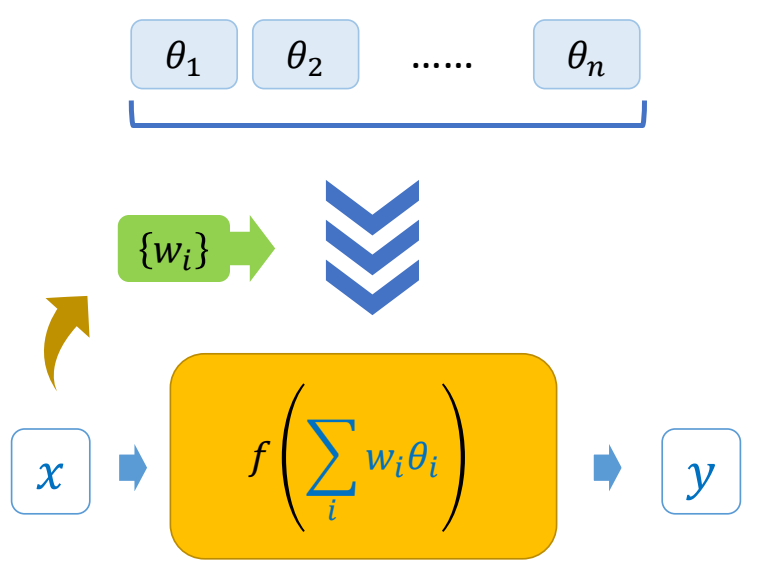
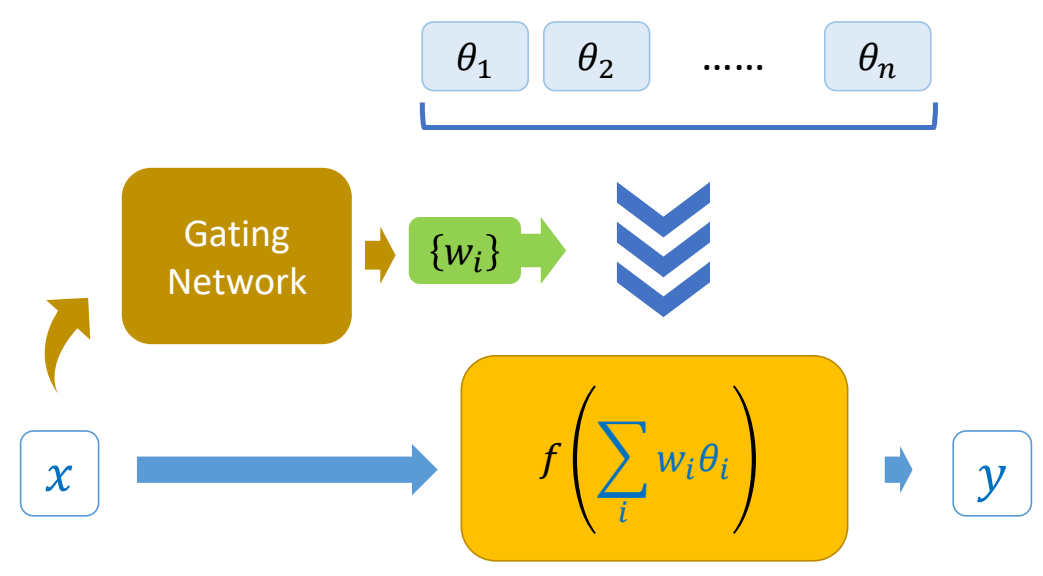
混合专家模型 Mixture of Experts
| 对专家结果混合。 | 对专家模型参数混合。 |
|---|---|
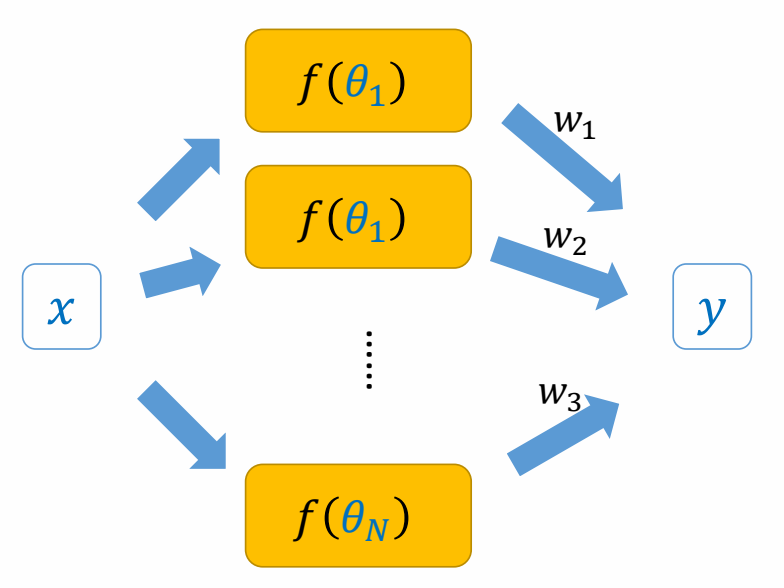 | 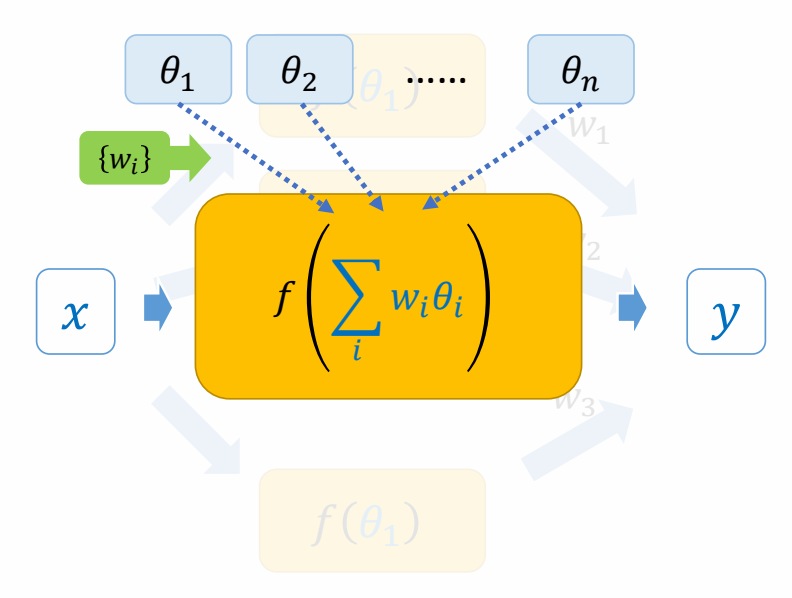 |
| \(y=\sum_{i}^{} w_if(x;\theta _i)\) | \(y=f(x;\sum_{i}^{} w_i\theta _i)\) ✅ PFNN 使用的是这种。 |
✅ 专家混合的权重由 phase 决定。
✅ 让每个专家专一地学特定的 phase.
$$ x_t = f (x_{t-1}; c_t, \theta _ t = \sum _ {i}^{} w_i(\phi _t) \theta _i) $$
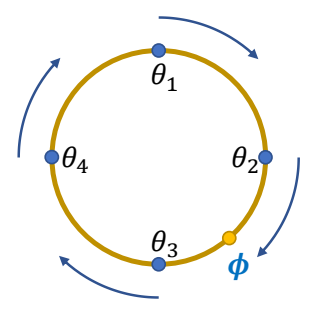
相位
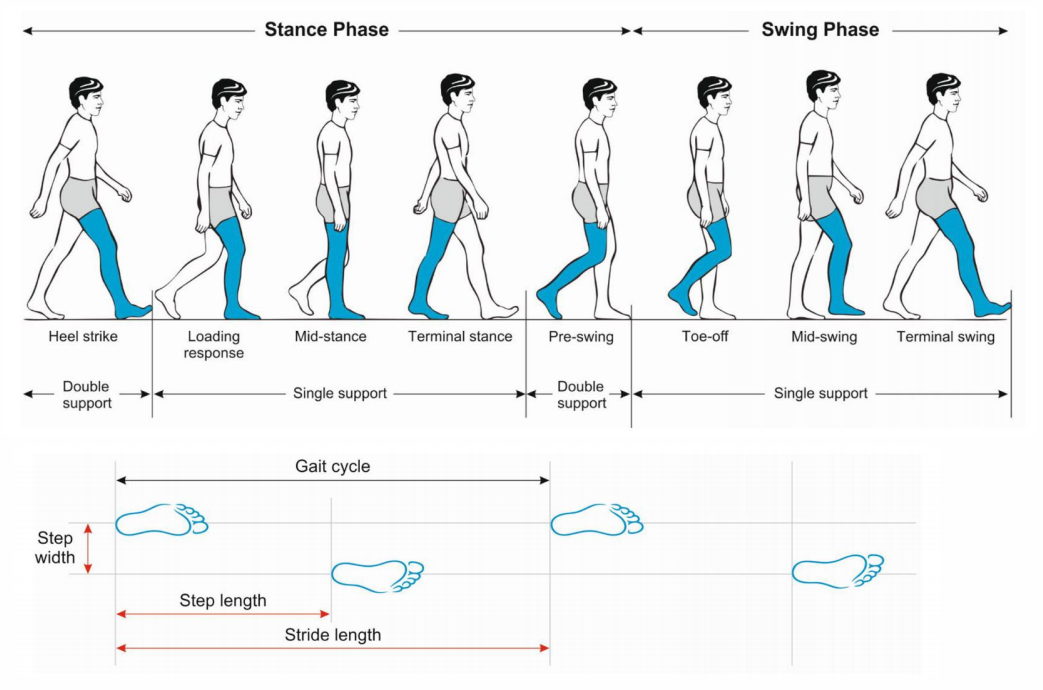
👆 phases of a walking gait cycle
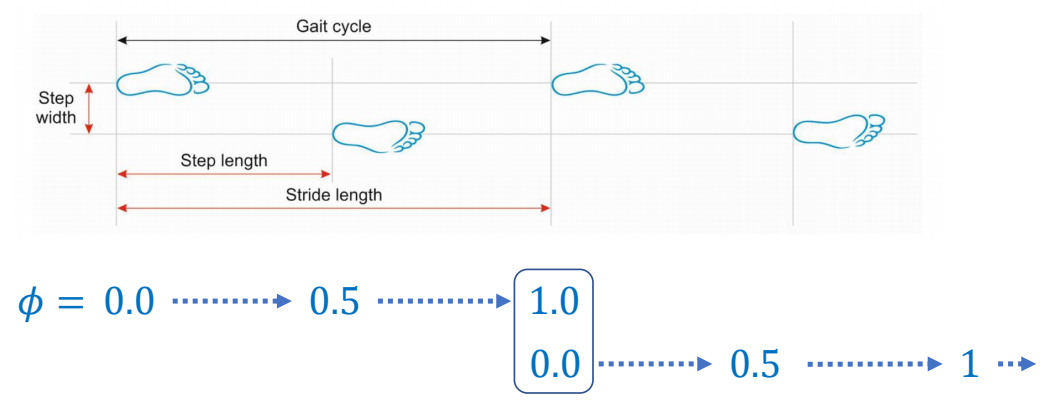
✅ 调整相位与时间的对应关系,可影响走路速度。
权重:Cubic Catmull-Rom Spline的混合计算方式
Cubic Catmull-Rom Spline:
$$ \begin{align*} \theta _t & = \theta _2 \\ & +\phi (-\frac{1}{2} \theta _1 + \frac{1}{2} \theta _3) \\ & +\phi^2 (\theta _1-\frac{5}{2} \theta _2 + 2\theta _3-\frac{1}{2} \theta _4)\\ & +\phi^3 (-\frac{1}{2} \theta _1+\frac{3}{2} \theta _2 - \frac{3}{2} \theta _3+\frac{1}{2} \theta _4) \end{align*} $$
模型推理
输入输出参数化
输入:
- 前一帧状态:前一帧关节位置 / 速度
- 轨迹控制与环境特征:轨迹位置 / 方向 / 高度、
- 步态语义标签
步态语义标签是5 维二进制向量,标识用户期望的是动作是站立、行走 、慢跑、跳跃、俯身中的一种,由人工标注得到。
轨迹控制与环境特征及步态语义标签,覆盖过去 1 秒、未来 0.9 秒的 12 个采样帧;
前一帧状态仅覆盖过去一帧。
输出:
- 当前帧状态:当前帧关节姿态 / 速度 / 角度、根节点运动速度、
- 相位变化量
- 足部接触标签
- 下一帧轨迹预测。
关键问题与解答
为什么 PFNN 选择将相位作为网络权重的参数化变量,而非像传统方法一样作为普通的输入特征?
- 更好地将不同相位的运动信息解耦,避免相位混合导致的Artifacts。
- 避免Dropout导致训练中相位的影响被稀释
- 通过相位动态生成权重,仅用 4 个控制点的样条,就让极简的 3 层全连接网络具备了海量运动数据的拟合能力,同时保持了 10MB 的极小内存占用,实现了表达能力与轻量化的平衡,这是固定权重的传统网络无法实现的。
地形匹配的核心的逻辑
人体移动的核心逻辑:无论平地还是崎岖地形,人类行走的「触地 - 抬脚 - 腾空 - 落地」的周期时序规律是完全一致的,地形仅改变「落地位置的高度」,不改变运动的核心时序逻辑。这就为平地动作与地形的匹配,提供了唯一且精准的锚点。
动捕数据不仅包含平地行走,还覆盖了慢跑、奔跑、不同高度的跳跃、不同幅度的俯身等动作,这些动作本身就包含了「腿部抬高 / 降低、身体重心调整」的能力,只是在平地采集时没有触发,而地形匹配的过程,就是把这些能力和地形高度做了对应。
P53
Advanced Phase Functions
| 改进前 | 改进后 |
|---|---|
 |  |
✅ PFNN 有确定的象位及对应的权重,但打篮球等动作,或动物走路,没有确定的象位。
✅ 因此不再显示地定义相位和权重,权重由当前状态与用户输入算出来。