Pose-NDF: Modeling Human Pose Manifolds with Neural Distance Fields
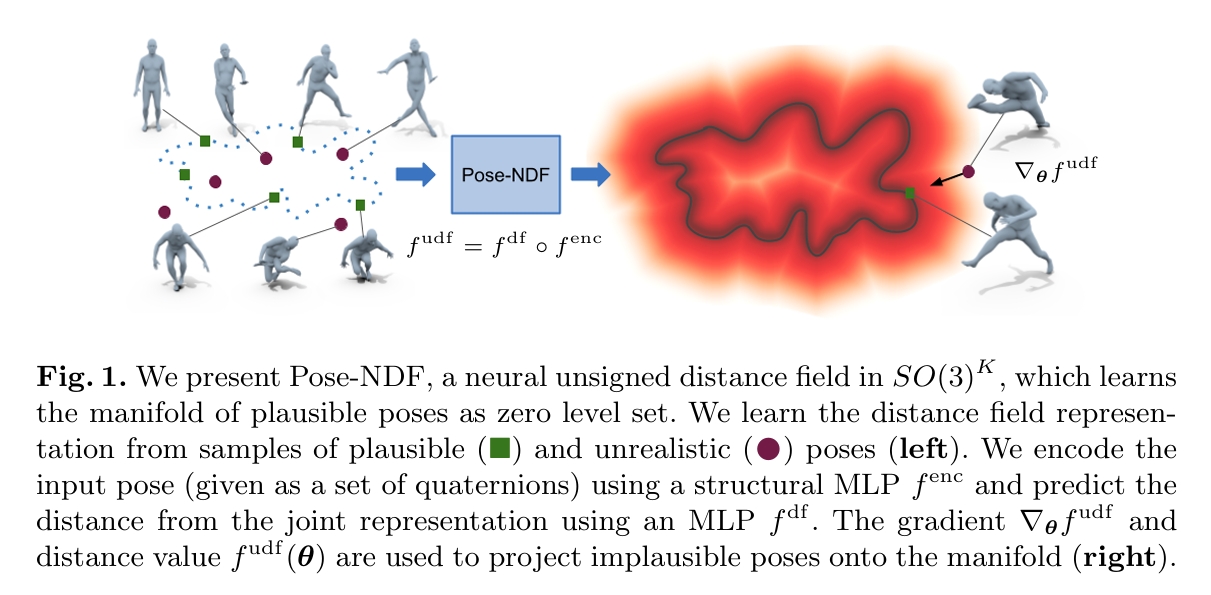
本文提出Pose-NDF——一种基于神经距离场(NDF)的连续型人体姿态概率模型。姿态或运动先验对于生成真实的新姿态,以及从含噪声或局部观测数据中重建精确姿态至关重要。Pose-NDF通过神经隐函数的零水平集学习合理姿态流形,将三维隐式曲面建模思想拓展至高维空间SO(3)^K(人体姿态由K个四元组构成的单数据点定义)。所得高维隐函数可对输入姿态求导,从而通过在三维超球面上执行梯度下降,将任意姿态投影至该流形。与现有基于VAE、将姿态空间转换为高斯分布的方法不同,本方法直接建模真实姿态流形并保持姿态间距离。实验表明,在去噪真实动作捕捉数据、遮挡姿态恢复、图像至三维姿态重建等下游任务中,Pose-NDF作为先验模型均优于当前最优方法。此外,通过随机采样与投影,本方法能比基于VAE的方法生成更多样化的姿态。我们将公开代码与预训练模型以供进一步研究,详见https://virtualhumans.mpi-inf.mpg.de/posendf/。
主要方法
数据定义
θ = {θ1, ..., θK}
其中θk是每个关节在其父坐标系下的四元数表达
距离定义

训练
---
title: NDF训练过程
---
flowchart LR
θ[("动作数据")]
noise["add noise"]
θ1..k(["每个关节的动作数据"])
hat_θ(["加噪数据"])
d_gt(["d_gt"])
v1..k(["关节1..k Latent Code"])
d(["Unsigned Distance"])
Loss(["Loss"])
θ --> noise --> hat_θ
hat_θ --> θ1..k -->Encoder1..k --> v1..k --> MLP --> d
θ & hat_θ --> 动作距离公式 --> d_gt
d & d_gt --> Loss
Loss e1@-->Encoder1..k
Loss e2@-->MLP
e1@{ animation: fast }
e2@{ animation: fast }
优化
---
title: 基于NDF的推断过程
---
flowchart LR
θ[("动作数据")]
θ1..k(["每个关节的动作数据"])
v1..k(["关节1..k Latent Code"])
d(["Unsigned Distance"])
θ --> θ1..k -->Encoder1..k --> v1..k --> MLP --> d
d e1@-->θ
e1@{ animation: fast }
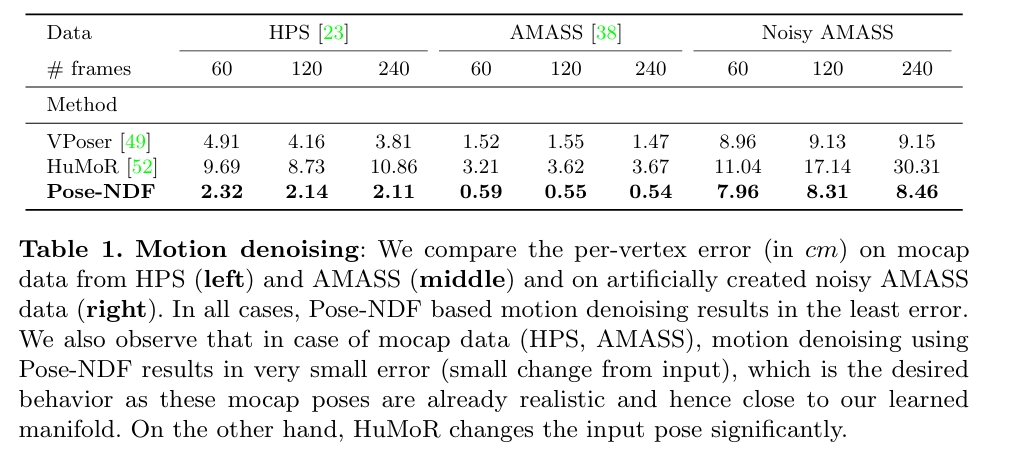
效果