OmniControl: Control Any Joint at Any Time for Human Motion Generation
这是一篇聚焦于人体运动生成控制的创新性研究论文,旨在解决现有方法在灵活控制人体运动生成中的局限性。以下从研究背景、核心方法、技术亮点及实验成果等方面进行解读:
1. 研究背景与问题
传统基于文本条件的人体运动生成模型(如扩散模型)通常仅能通过文本描述生成整体动作,但对具体关节的精细化控制能力不足。例如,现有方法大多只能控制骨盆轨迹,而无法针对不同关节在不同时间点施加动态约束。这种局限性限制了模型在需要高精度运动控制的应用场景(如动画制作、康复训练等)中的实用性。因此,OmniControl提出了一种新的框架,旨在实现任意关节、任意时间点的灵活空间控制。
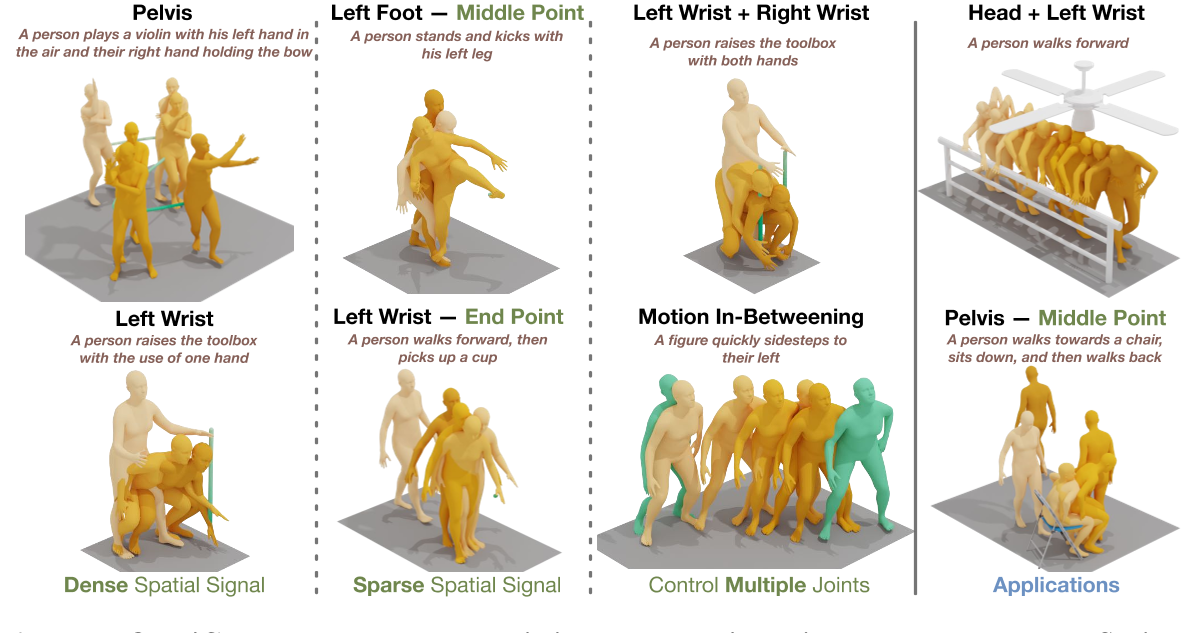
颜色由浅至深代表动作的时间顺序。较深的颜色表示序列中的后期帧。
绿线或点表示输入控制信号。
前情提要
Diffusion process for human motion generation

Baseline: MDM
Human pose representations
类似于T2M(Generating diverse and natural 3d human motions from text)中的表示,但把所有相对位置转换为绝对位置。
2. 核心方法
OmniControl的核心创新在于将**空间引导(Spatial Guidance)与真实感引导(Realism Guidance)**结合,通过扩散模型框架实现精准且自然的运动生成。
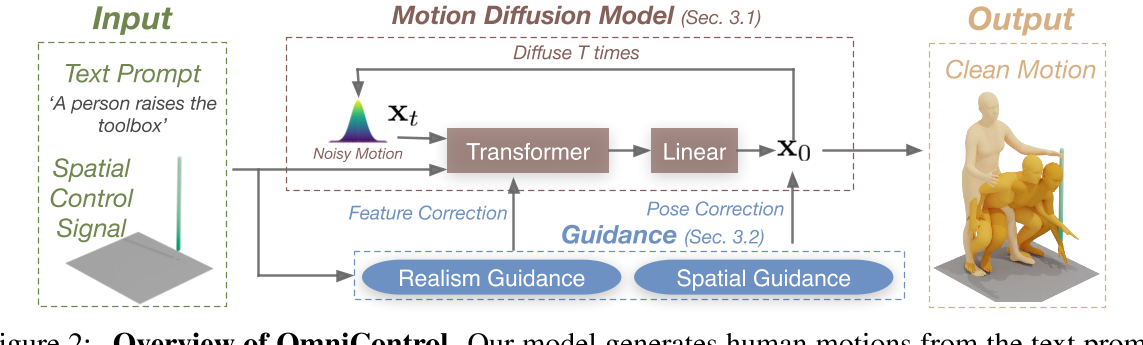
(1)空间引导
- 功能:确保生成的运动严格符合用户输入的空间控制信号(如关节位置、轨迹等)。
- 实现:通过分析几何约束,将控制信号映射为运动序列的梯度,直接优化扩散模型的生成过程。
- 例子:
假设用户希望手腕在时间点 \( t \) 的位置为 \( p_{\text{target}} \),而当前生成的手腕位置为\( p_{\text{current}} \),则两者的几何偏差为:
\(\text{偏差} = | p_{\text{current}} - p_{\text{target}} |^2 \)
梯度信号即为该偏差对当前生成动作序列 \( x_t \) 的导数:
\( \text{梯度} = \frac{\partial \text{偏差}}{\partial x_t} \)
它指明了如何调整 \( x_t \),才能使手腕位置更接近目标。
在扩散模型的每一步去噪过程中:
- 模型预测噪声 \( \epsilon_{\text{model}} \)(常规扩散过程);
- 同时计算控制信号约束的梯度 \( \nabla_{x_t} \mathcal{C}(x_t) \),并调整预测的噪声:
\( \epsilon_{\text{adjusted}} = \epsilon_{\text{model}} - \lambda \cdot \nabla_{x_t} \mathcal{C}(x_t) \)
其中,\( \lambda \) 是控制信号强度的权重系数。
以上过程仅在推断时使用
(2)真实感引导
尽管空间引导可以有效地强制受控关节遵守输入控制信号,由于相对人体姿势表示的性质,空间引导的梯度不能反向传播到其他关节,因此对其他关节没有影响,正如我们前面提到的。这将导致不切实际的运动。此外,由于扰动位置只是整个运动的一小部分,运动扩散模型可能会忽略空间引导的变化,无法对其余人体关节进行适当的修改,导致人体运动不连贯,脚滑动等artifacts。
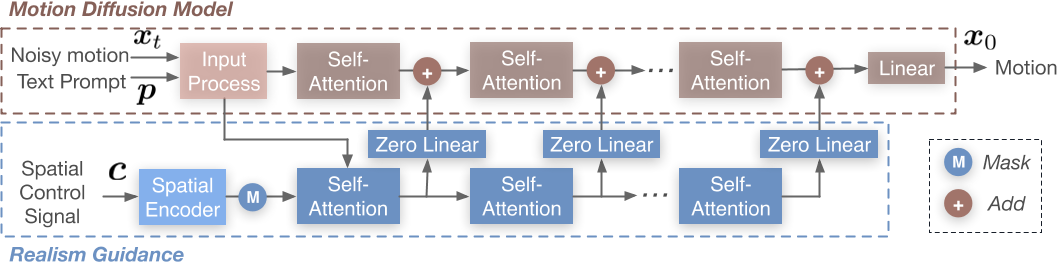
- 功能:修正所有关节的运动细节,提升动作的连贯性和自然性。
- 实现:引入物理合理性约束(如关节运动范围、动力学特性)和运动风格一致性,避免单纯满足空间控制导致的机械感或不合理姿态。
实际上没有显示地引入物理约束,而是用ControlNet的方式引入控制信号,然后自己从数据中学到满足物理约束的控制生成。
(3)互补性设计
两种引导机制通过权重平衡协同工作:空间引导优先满足控制精度,真实感引导则优化整体动作质量。实验表明,二者的结合显著优于单一引导方法。
4. 实验结果
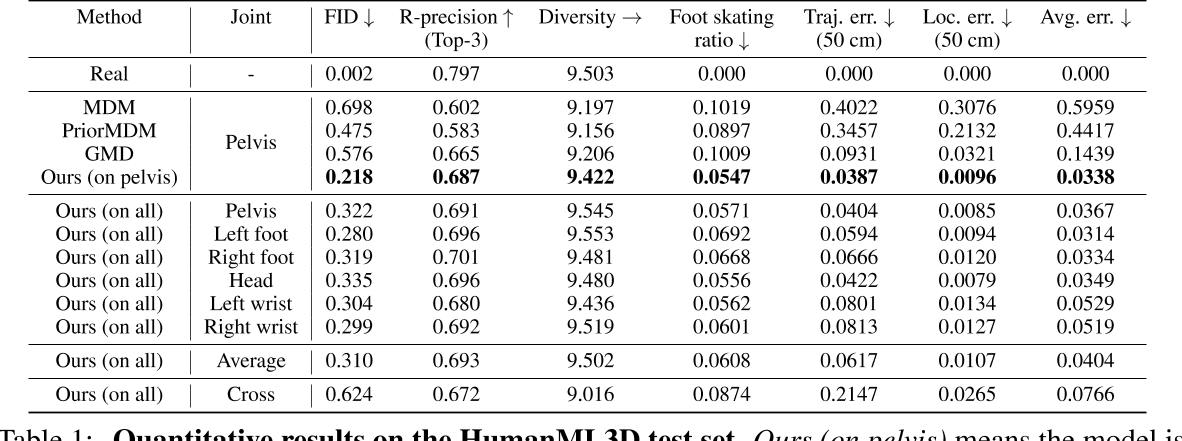
- HumanML3D test data
-
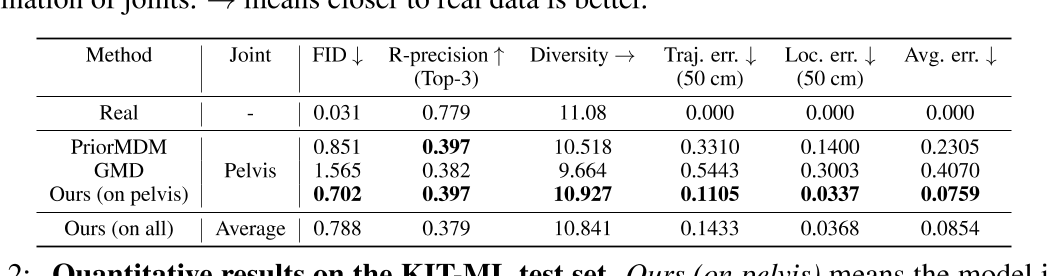
KIT-ML test data
-
骨盆控制精度提升:在骨盆轨迹控制任务中,OmniControl的误差较现有方法更低且生成质量更好,证明了空间引导的有效性。
-
多关节控制能力:实验展示了对手腕、膝盖等非核心关节的精细化控制能力,例如生成“挥手时手腕保持固定高度”的动作,且不影响整体行走的自然性。
-
真实感评估:通过用户主观评分和物理合理性指标(如关节加速度连续性),OmniControl生成的动作在真实感上优于纯控制优化的基线模型。
5. 应用与意义
- 动画与游戏:为角色动画提供高效、精准的动作设计工具,减少手动调整成本。
- 医疗康复:生成符合患者特定关节活动需求的训练动作,辅助个性化康复方案制定。
- 机器人运动规划:为仿人机器人提供更接近人类运动模式的参考轨迹。
6. 局限性与未来方向
- 实时性限制:扩散模型的迭代生成过程导致计算延迟较高,未来可通过蒸馏或加速采样算法优化。
- 复杂场景扩展:当前实验集中于单人物体交互,多人与环境交互的复杂场景仍需探索。
总结
《OmniControl》通过梯度驱动的空间引导与物理约束的真实感引导,在扩散模型框架内实现了人体运动生成的精细化控制。其核心创新在于将控制信号直接映射为生成过程的优化目标,而非依赖外部模块。其代码和数据集的开源将进一步推动相关领域的研究。