GENMO:AGENeralist Model for Human MOtion
NVIDIA
研究背景与问题
要解决的问题
运动生成(如从文本生成动作)和运动估计(如从视频重建3D动作)
现有方法及局限性
视频运动估计通常关注确定性预测以追求精度,文本/音乐到运动生成则需输出多样性以覆盖可能动作,因此将运动生成和运动估计视为独立任务。
这导致模型冗余且知识无法共享。但实际上这两类任务本质均依赖对时空运动规律的理解,而技术路线分离阻碍了性能提升。
本文方法
将运动估计与生成整合至单一框架中。
- 将运动估计重新定义为受约束的运动生成,要求输出运动必须严格满足观测到的条件信号。
- 通过结合回归与扩散模型的协同效应,既能实现精准的全局运动估计,又能支持多样化运动生成。
- 一种估计引导的训练目标,利用带有2D标注和文本描述的野外视频数据来增强生成多样性。
- 支持处理可变长度运动及混合多模态条件(文本、音频、视频),在不同时间区间提供灵活控制。
这种统一方法产生了协同效益:生成先验能提升遮挡等挑战性条件下的运动估计质量,而多样视频数据则增强了生成能力。
主要贡献
-
首个通用模型:GENMO 首次统一了SOTA 全局运动估计与灵活的、多模态条件(视频、音乐、文本、2D 关键点、3D 关键帧)运动生成。
-
灵活架构设计:支持可变长度运动生成,并允许任意多模态输入组合,无需复杂后处理。
-
双模式训练范式:探索回归与扩散的协同作用,并提出估计引导的训练目标,使模型能有效利用野外视频数据。
-
双向提升:生成先验 提升遮挡等挑战条件下的估计鲁棒性;多样化视频数据 增强生成表现力。
通用人体运动模型
多模态输入
- 条件信号集 \(\mathcal{C}\):包含一种或多种模态输入:
- 视频特征 \(\mathbf{c}_ {\text{video}} \in \mathbb{R}^{N \times d_{\text{video}}}\)
- 相机运动 \(\mathbf{c}_ {\text{cam}} \in \mathbb{R}^{N \times d_{\text{cam}}}\)
- 2D骨架 \(\mathbf{c}_ {\text{2d}} \in \mathbb{R}^{N \times d_{\text{2d}}}\)
- 音乐片段 \(\mathbf{c}_ {\text{music}} \in \mathbb{R}^{N \times d_{\text{music}}}\)
- 2D包围框 \(\mathbf{c}_ {\text{bbox}} \in \mathbb{R}^{N \times d_{\text{bbox}}}\)
- 自然语言描述 \(\mathbf{c}_ {\text{text}} \in \mathbb{R}^{M \times d_{\text{text}}}\)(\(M\)为文本词元数)
- 条件掩码集 \(\mathcal{M}\):为每个条件类型 \(\mathbf{c}_ {\star}\) 定义二元掩码矩阵 \(\mathbf{m}_ {\star} \in \mathbb{R}^{N \times d_ {\star}}\),当条件特征可用时掩码值为1,否则为0。
运动序列 x 的表示
- 全局轨迹(第 \(i\) 帧):
- 重力视图朝向 \(\Gamma_{i}^{\text{gv}} \in \mathbb{R}^6\)
- 局部根节点速度 \(v_{i}^{\text{root}} \in \mathbb{R}^3\)
- 局部运动(第 \(i\) 帧):
- SMPL模型参数[45]:
- 关节角 \(\theta_i \in \mathbb{R}^{24 \times 6}\)
- 身形参数 \(\beta_i \in \mathbb{R}^{10}\)
- 根节点位移 \(t_{i}^{\text{root}} \in \mathbb{R}^3\)
- SMPL模型参数[45]:
- 相机位姿(第 \(i\) 帧):
- 相机到世界的变换 \(\pi_i = (\Gamma_{i}^{\text{cv}}, t_{i}^{\text{cv}})\)
- 相机视图朝向 \(\Gamma_{i}^{\text{cv}} \in \mathbb{R}^6\)
- 相机位移 \(t_{i}^{\text{cv}} \in \mathbb{R}^3\)
- 相机到世界的变换 \(\pi_i = (\Gamma_{i}^{\text{cv}}, t_{i}^{\text{cv}})\)
- 接触标签 \(p_i \in \mathbb{R}^6\)(手足接触状态)
统一估计与生成设计
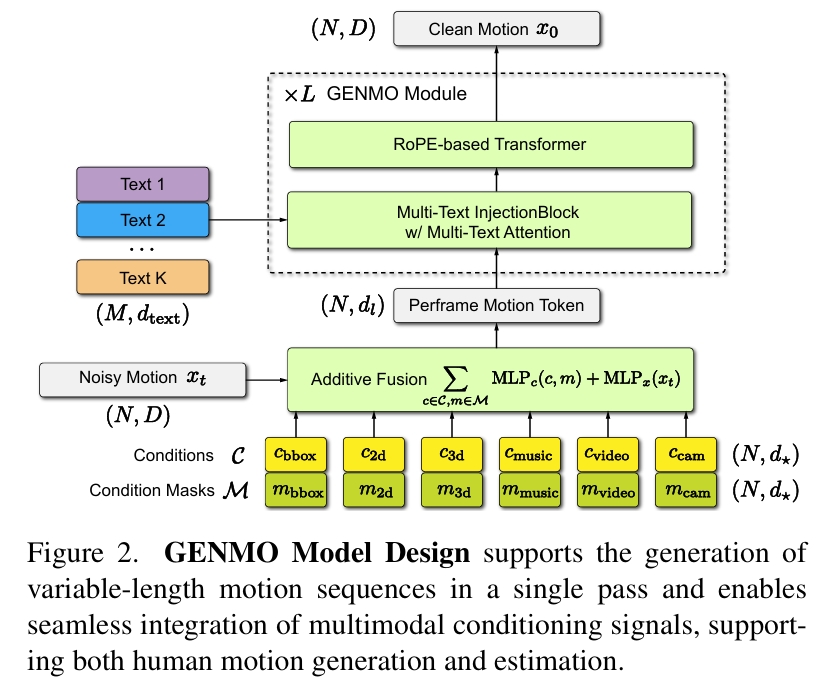
输入:带噪声的运动序列 \(x_t\) 与条件信号 \(C\)、条件掩码 \(M\)
输出:干净运动序列 \(x_0\)
其中Multi-Text Attention为:
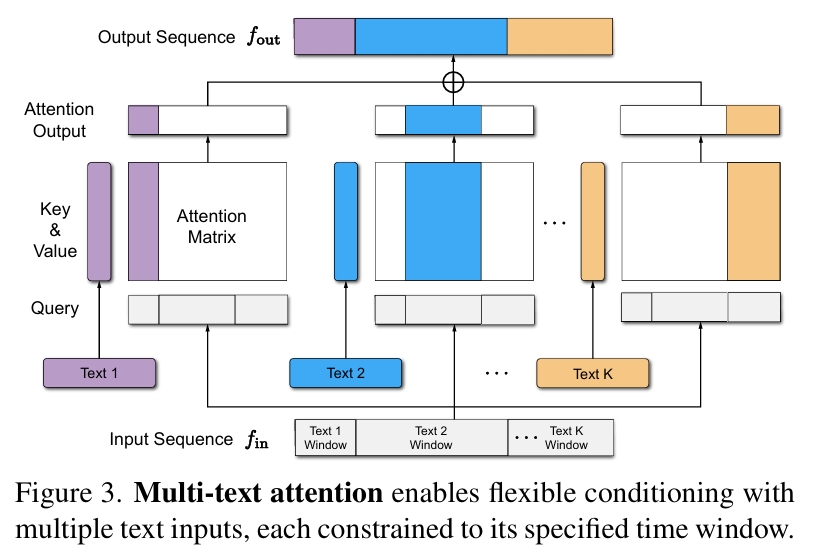
每一个文本序列与特定窗口的x部分做cross attention。
任意长度运动推理
在基于 RoPE 的 Transformer 块中引入滑动窗口注意力机制:每个令牌仅关注其前后 W 帧邻域内的令牌。
该设计使模型能生成远超训练时长的运动序列,同时保持计算效率并确保运动过渡平滑连贯。
混合多模态条件处理
文本条件(无帧级对齐)→ 通过多文本注意力机制处理
时序对齐模态(视频/音乐/2D骨架)→ 通过时序掩码策略管理
双模式训练范式
当前的diffusion model不足以支撑与输入视频严格一致的运动重建。
作者发现运动估计与文本生成任务存在一下差异:
- 运动估计结果变异性极低(确定性行为)。文本生成结果变异性显著(概率性行为)。
- 视频条件模型:首步预测接近最终结果,后续步变化极小。文本条件模型:各步预测方差显著。
得出结论:首步预测精度成为关键。
因此提出提出双模式训练范式。
估计模式
对纯噪声z预测时间步T下的输出x0,强制模型退化为确定性映射。
除了diffusion model本身的重建Loss意外,再增加2D/3D关节点位置的正则项约束。
生成模式
- 伪标签生成:以视频/2D骨架为条件,通过估计模式输出伪干净运动
- 噪声注入:对伪标签执行前向扩散
- 2D重投影损失:约束预测运动与真实2D关键点对齐
- 物理约束:同步施加几何损失
实验
动作估计
Global Motion Estimation
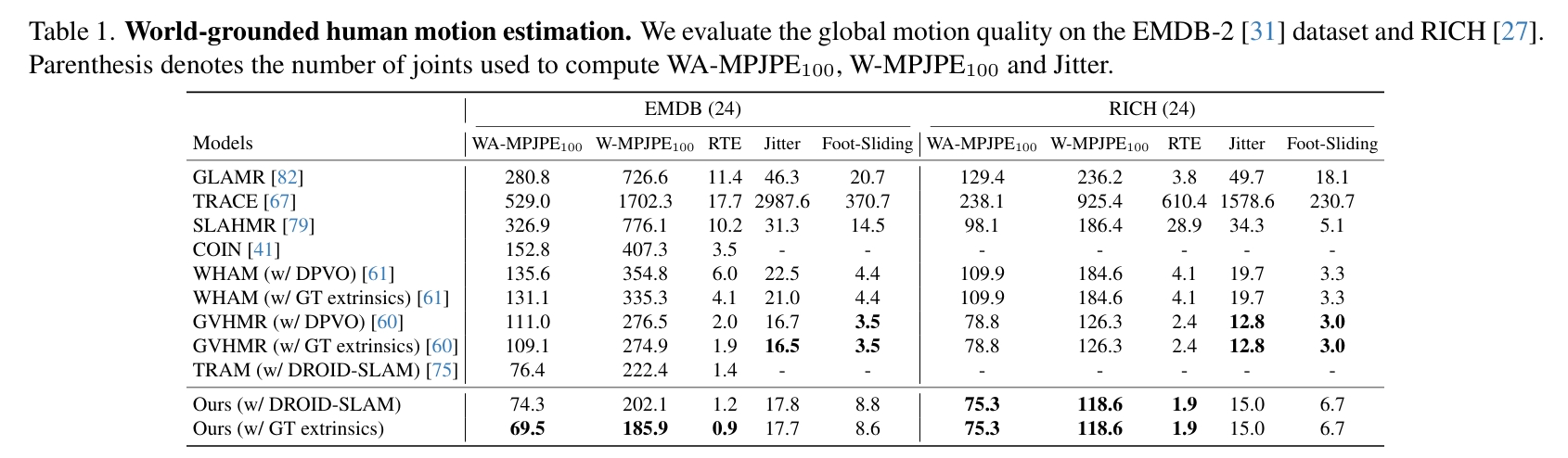
global motion主要关注的是滑步与轨迹。
分析:
WHAM的Motion Encoder&Decoder使用纯3D数据训练,相当于是3D动作先验模型,但这个先验模型主要是为了预测local motion。它借助SLAM结果和motion latent code共同预测轨迹,这一步需要结合视频。经测试,可能轨迹主要由motion latent code决定,因此无法区分踏步与向前走的场景。
本文根据3D动作生补全出合理的轨迹(类似WHAM)。区别在于,
- WHAM只是借助视频-3D数据来学习这个知识,而本文借助的通过大量数据的3D生成模型,因此在这方面能力更强大。
- WHAM预测轨迹的另一个输入是SLAM结果,提供的额外信息有限,而且依赖于SLAM的准确性。但本文会输入完整的视频,信息更丰富。应该可能区分踏步与向前走的场景。
WHAM和GVHMR都会显式地预测stationary并以此约束foot sliding,因此滑步问题比较小。本文只是约束了2d/3d position或速度,没有显示地预测stationary。
TRAM没有使用纯3D数据或3D动作先验模型。它完全依靠SLAM解耦相机运动和人物运动,以获得真实的人物轨迹。
Local Motion Estimation
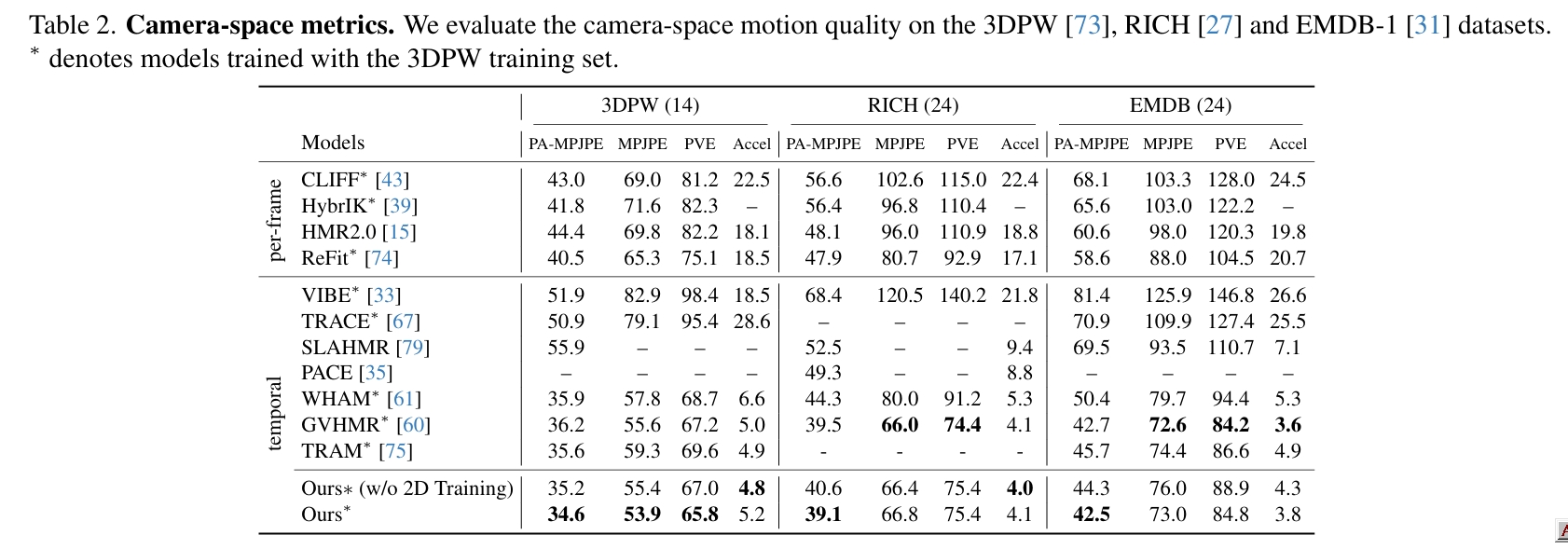
global motion主要关注的是动作准确度以及与视频的贴合度。
diffusion由于其泛化能力,很难约束它生成的动作跟视频完全一致,因此本文使用了双模式训练范式,从指标上看,这个训练策略非常有效。
动作生成
Music to Dance
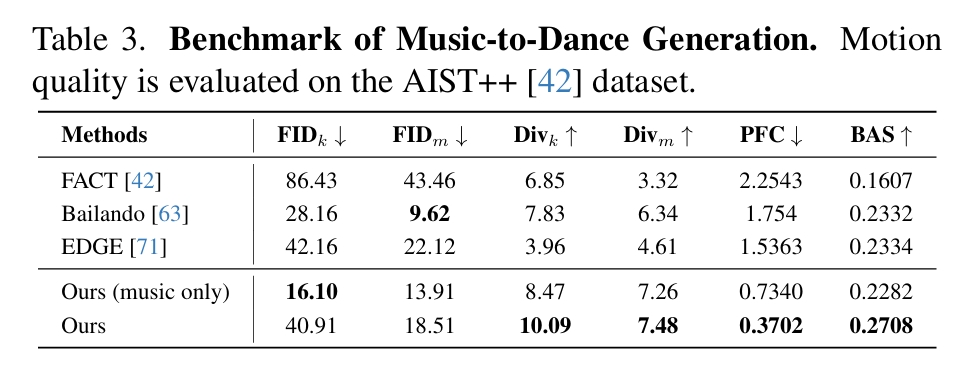
| 指标 | 物理意义 |
|---|---|
| Divk | 关键帧多样性 |
| Divm | 运动序列多样性 |
| PFC | 足部接触物理合理性 |
| BAS | 节拍对齐精度 |
| FID | 分布相似性(越低越好) |
Text-to-Motion
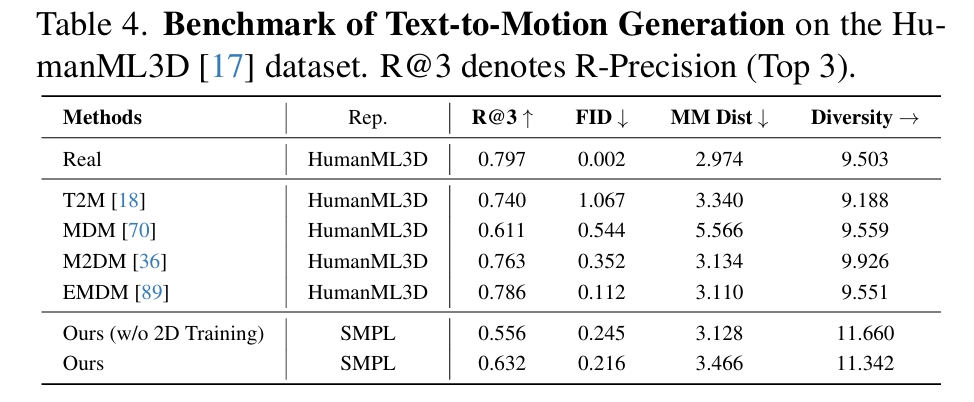
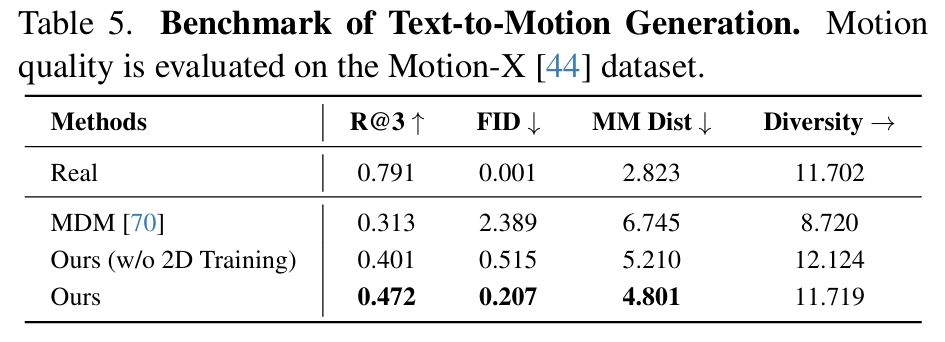
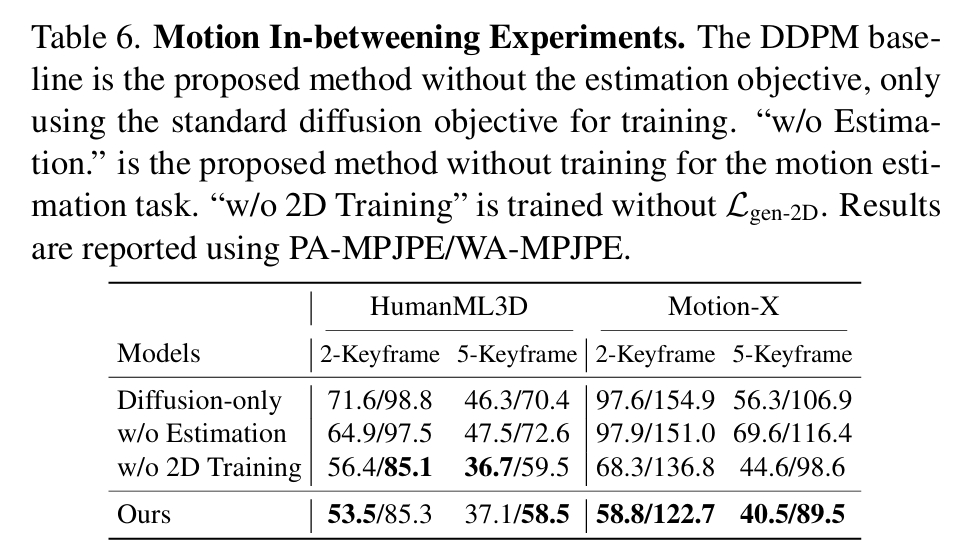
通过Ours (w/o 2D Training)和Ours的对比,可见引入2D训练数据确实能对模型各方面性能有提升。
在表4中,GENMO的客观分数偏低,文中解释是因为本文所使用的动作表示与其它不同,在不同动作表示之间的迁移影响了结果的精度。
Motion In-betweening