AnimateAnyMesh: A Feed-Forward 4D Foundation Model for Text-Driven Universal Mesh Animation
研究背景与问题
要解决的问题
根据文本驱动对任意3D网格进行动画化
本文方法及优势
- 采用了一种新颖的 DyMeshVAE 架构,通过将空间特征和时间特征解耦,并保留局部拓扑结构,从而有效地压缩并重建动态网格序列。
- 为了实现高质量的文本条件生成,我们在压缩后的潜在空间中采用了一种基于修正流(Rectified Flow) 的训练策略。 贡献了一个名为 DyMesh Dataset 的大规模数据集,包含超过400万个带有文本标注的多样化动态网格序列。
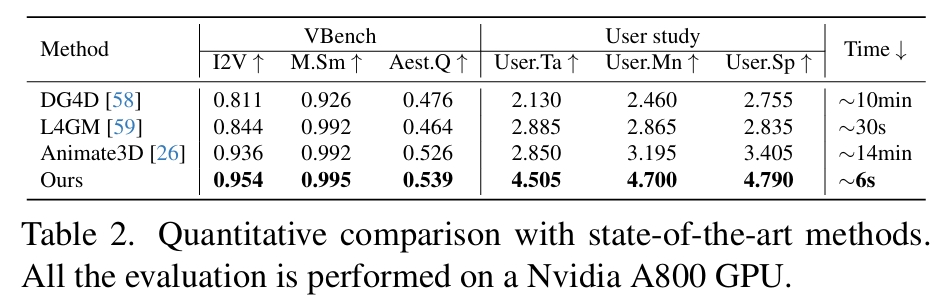
实验结果表明,AnimateAnyMesh能够在几秒钟内生成语义准确且时间连贯的网格动画,在质量和效率方面均显著优于现有方法。
主要方法
DyMeshVAE
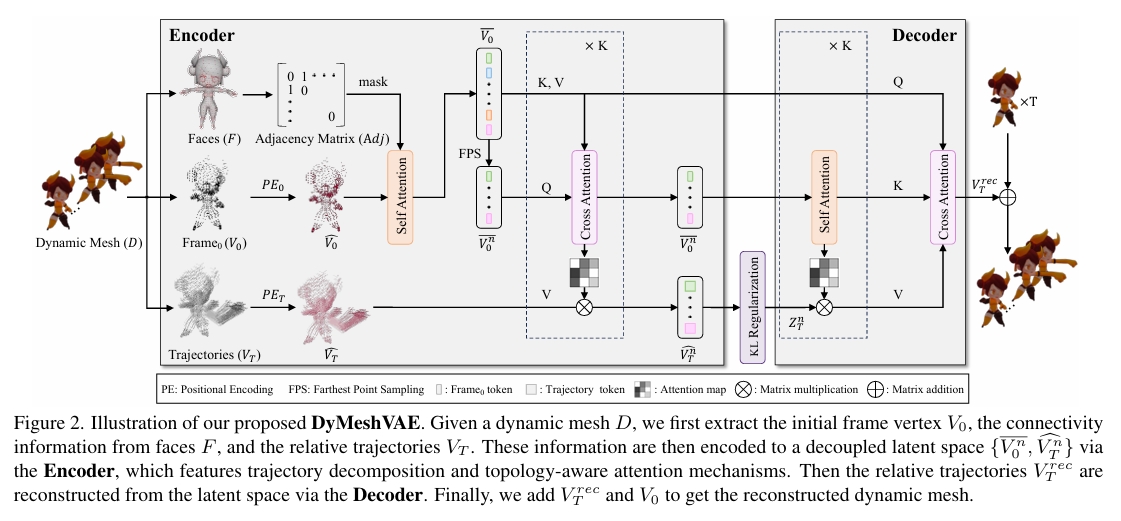
顶点编码
给定一个动态网格序列 \( \mathcal{D} \subset { F \in \mathbb{R}^{M\times3},\ V \in \mathbb{R}^{T\times N\times3} } \)
首先将顶点序列 \( V \) 分解为初始帧顶点 \( V_0 \in \mathbb{R}^{N\times3} \) 和相对运动轨迹 \( V_T \in \mathbb{R}^{N\times(T\cdot3)} \),满足以下关系:
$$ V^t = V^0_t + V^t_T,\quad \text{其中 } t = 1, 2, \dots, T $$
其中 \( t \) 表示时间序列的索引。
将顶点序列 V 拆分为 V0 和 VT 是DyMeshVAE 的关键建模思想之一。这种分解方式有助于实现形状与运动的解耦建模,同时使得运动分布更接近一个均值为零的正态分布。
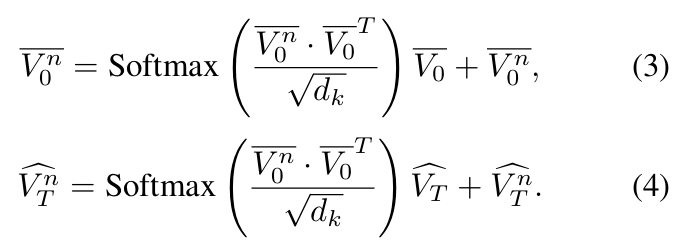
位置编码
目的:增强轨迹重建的稳定性并防止粘连效应
方法:对 \( V_0 \) 和 \( V_T \) 使用不同的位置编码策略,从而得到编码后的特征 \( \hat V_{0} \) 和 \( \hat V_{T} \)。
拓扑编码
从输入网格的面片信息 F 中构建一个邻接矩阵 Adj。该邻接矩阵随后作为自注意力层中的注意力掩码,使每个顶点能够聚合其相邻顶点的信息:
$$ \bar V_0 = \text{Softmax}\left( \frac{\hat V_{0} \cdot \hat V_{0}^T \odot \text{Adj}}{\sqrt{d_k}} \right)\hat V_{0} + \hat V_{0} \tag{2} $$
捕捉运动模式之间的相关性
对拓扑感知顶点特征 \(\bar \V_0\)应用最远点采样(Farthest Point Sampling, FPS)55,得到\(\bar \V_0^n\)
attention map
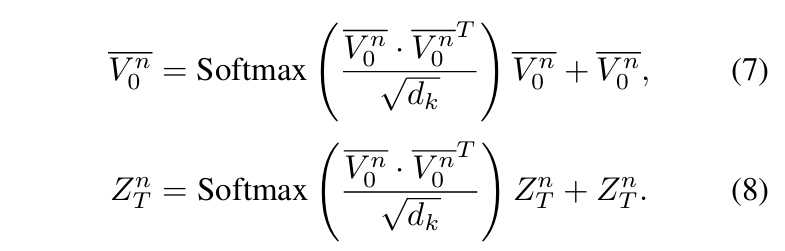
KL Regularization
目的:对相对轨迹 \(\hat \V_T^n\) 的分布进行建模。
- 在潜空间采用 KL 正则化以调控特征多样性。即:
通过两个全连接层对 \(\hat \V_T^n\) 进行线性投影,预测其分布的均值和标准差 - 随后按以下方式对 VAE 潜变量进行采样:

- 正则化约束为:

DyMeshVAE Decoder


形状引导的文本到轨迹模型
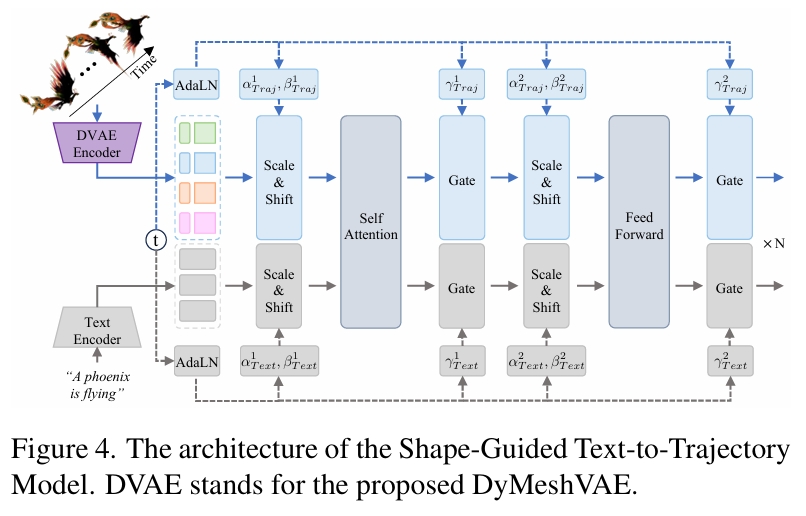
目的:在给定初始网格和文本提示的条件下估计相对轨迹的后验分布。
每个动态网格序列 \( \mathcal{D} \) 被编码为一对潜表示 \( {V_n^0, Z_n^T} \)。
- 使用全局统计量(均值 \( \mu_0, \mu_T \) 和标准差 \( \sigma_0, \sigma_T \))标准化潜变量以消除数值差异
- 沿通道维度拼接标准化特征 → 形成综合轨迹嵌入
- 通过预训练CLIP文本编码器获取文本嵌入
- 采用时间步 \( t \) 相关的独立自适应层归一化(AdaLN)参数分别调制轨迹嵌入和文本嵌入
- 重缩放后的特征拼接进行自注意力计算
- 多注意力块处理后,分解输出特征并基于保存的统计量 \( \mu_0, \mu_T, \sigma_0, \sigma_T \) 还原原始尺度
训练
训练
遵循修正流(Rectified Flow, RF)[42]的扩散范式,我们旨在最小化预测流与真实流之间的均方误差。
修正流:Flow straight and fast: Learning to generate and transfer data with rectified flow
推断
基于流式的常微分方程(ODE)公式实现修正流的采样过程。
采样完成后,将生成的轨迹特征 \( Z_n^T \) 与拓扑感知顶点特征 \( V_n^0 \) 输入解码器生成相对轨迹,最终通过将解码的顶点位移应用于给定网格,生成动态网格序列。
实验
估计指标
- 重建质量评估:计算重建顶点轨迹与真实轨迹间的逐帧平均 L2 距离
- 从固定视角渲染动画网格,并从视觉质量上评估
- 人工评估
横向对比
- DG4D [58]:基于微分几何的变形模型
- L4GM [59]:潜在空间网格运动生成器(使用 DynamiCrafter [86] 作为视频生成组件)
- Animate3D [26]:神经渲染驱动的动画框架
| 方法 | 技术缺陷 | 本方案解决策略 |
|---|---|---|
| DG4D | 视频蒸馏导致3D表示退化 • 高斯球参数无法精确描述拓扑变化 | ✅ 直接操作网格顶点 • 保留显式几何结构 |
| L4GM | 视频生成依赖背景信息 • 孤立物体缺乏纹理线索 → 运动估计失真 | ✅ 端到端轨迹学习 • 无需中间视频表示 |
| Animate3D | 多阶段误差传递 网格→高斯→视频→轨迹的转换损失 | ✅ 单阶段预测框架 • 消除累计误差 |
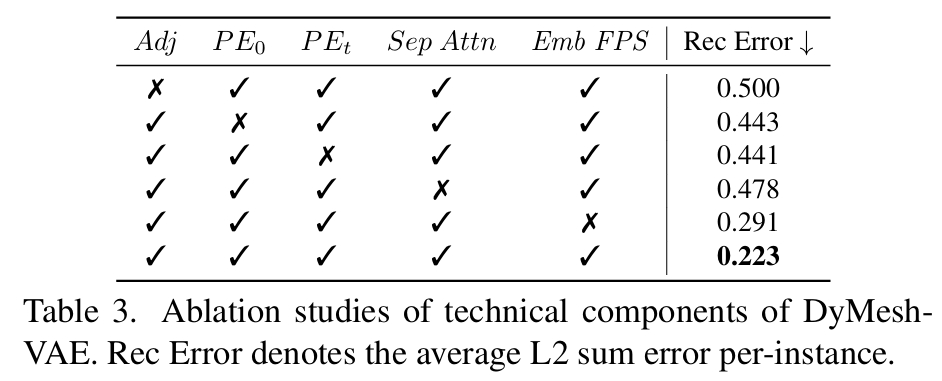
消融实验
| 组件 | 输入对象 | 核心功能 | 失效后果 |
|---|---|---|---|
| Adj | 网格边连接关系 | 建立顶点语义边界(如手指关节 vs 手掌) | 跨语义区域粘连(图 7) |
| PE₀ | 初始顶点坐标 | 编码空间位置信息 → 增强静态特征区分度 | 对称部位运动混淆 |
| PEₜ | 轨迹向量 | 描述运动方向/幅度 → 提升时序建模能力 | 运动轨迹抖动(图 8) |
| Sep Attn | 初始特征 \(V_n^0\) | 仅基于拓扑计算注意力 → 强化 "结构-运动" 关联规则 | 局部运动协调性下降 23% |
| Emb FPS | 邻域增强特征 | 保留语义信息的采样 → 512 令牌覆盖关键运动区域 | 重建误差上升 15.7% |