Drive Any Mesh: 4D Latent Diffusion for Mesh Deformation from Video
研究背景与问题
要解决的问题
对现有 3D Mesh进行动画化
本文方法及优势
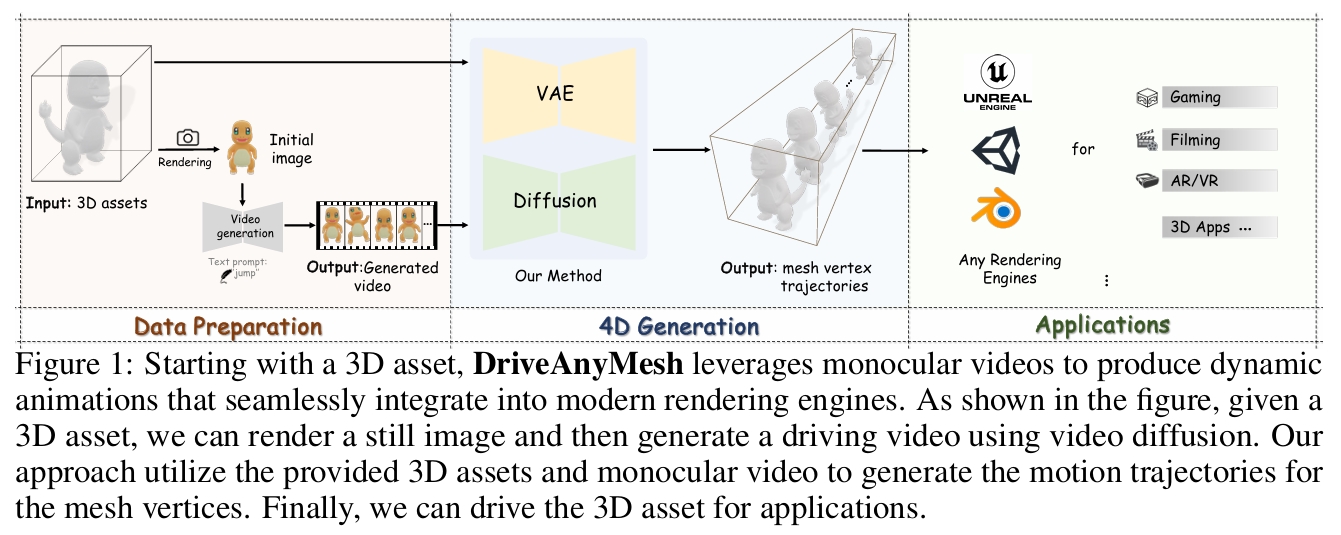
- 输入 1:初始几何 - 一个表示目标物体的初始点云
P1。它包含N个三维点(pi ∈ R³),通常通过对用户提供的静态 3D 网格进行采样获得。P1定义了物体的初始形状。 - 输入 2:运动参考 - 一个单目视频
V。它包含T帧图像(It),由固定相机拍摄。视频提供了期望的运动模式或姿态序列参考。 - 输出:运动轨迹序列 - 一个点云序列
P = {P1, P2, ..., PT}。 - 实现手段: 使用一个 4D 潜在扩散模型 来建模和学习这个条件分布
p(P|P1, V)。该模型的核心功能是进行条件去噪:从一个噪声版本的点云序列开始,在P1和V的引导下,逐步去噪,最终得到干净的、代表目标动画的点云轨迹序列P。
主要贡献
一种新颖的 4D 生成方法,利用单目视频为 3D 资产生成动画;
一个大规模 4D 资产数据集,包含多视角视频和网格顶点序列;
一种新的基于潜在扩散模型的方法,配备了专为 4D 生成设计的新型 VAE 架构和扩散结构。
主要方法
数据准备
从庞大的 Objaverse 数据集 [5, 4] 中精心策划了一个新的 4D 数据集,该数据集包含大量带标注的 3D 对象。
基于点云轨迹的运动表示
核心思想: 将物体的运动表示为其网格顶点随时间的移动路径(轨迹)。
优点: 输出是显式的点云序列 {Pt},其中 Pt 是时间 t 时的顶点位置。这种表示天然兼容所有现代渲染引擎,因为引擎可以直接读取和渲染顶点位置序列定义的网格动画。
关键挑战:不同 3D 网格模型的顶点数量 (N) 差异很大。
解决方案:潜在集 (Latent Sets)
3DShape2VecSets
基于 Transformer 的 VAE
目标: 学习一个紧凑的 4D 潜在表示(即潜在集 F),它能充分编码形状和运动信息,并能被高效地生成和重建。

- 4D 运动编码器: 输入初始点云 P1(几何形状)和多视角动画图像序列(视觉外观和运动信息)。压缩这些时空信息,输出潜在集 F。
- KL 正则化块: 在训练过程中,它约束学习到的潜在集 F 的分布接近一个先验分布(通常是标准正态分布)。(VAE标准操作)。
- 4D 运动解码器: 输入是潜在集 F。响应查询(顶点索引 i 和时间 t),输出顶点 i 在时间 t 的位置,从而重建或生成对应的点云轨迹序列。
使用扩散模型进行运动生成
输入: 用户提供 P₁ (初始网格点云) 和 V (单目参考视频)。
Denoiser 利用空间、条件(几何+外观)和时间注意力机制,预测出更干净的潜在序列{Ẑₜ}ᵗ⁼₁ᵀ。
VAE 将 {Ẑₜ}ᵗ⁼₁ᵀ 输入到 VAE 的解码器中。输出预测的点云轨迹序列 P = {P₁, P₂, ..., Pₜ},即最终的 4D 网格动画。
后处理
基于欧氏距离的阈值滤波机制,用于消除抖动。
实验
测试指标
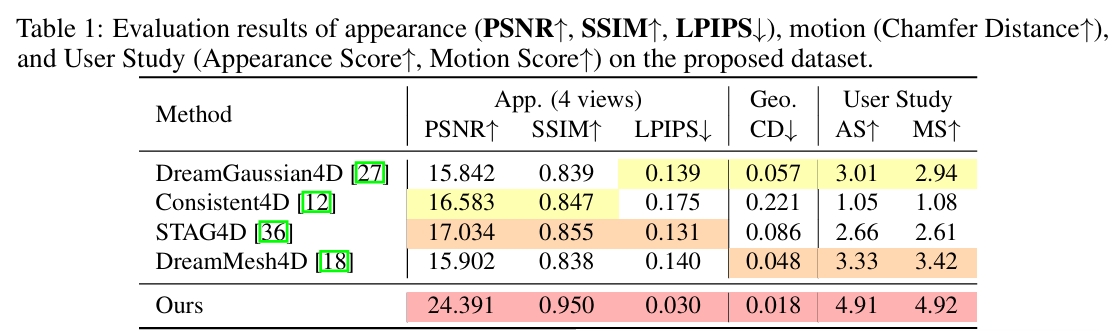
从视觉质量上评估:
峰值信噪比 (PSNR)、结构相似性指数 (SSIM) 和学习感知图像块相似度 (LPIPS)
横向对比
DreamGaussian4D [27], Consistent4D [12], STAG4D, DreamMesh4D
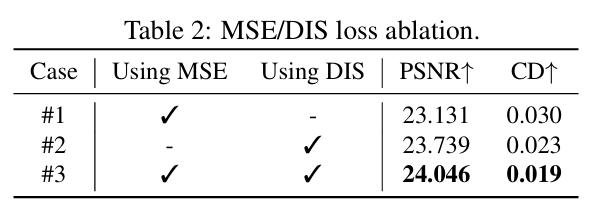
消融实验
在训练变分自编码器 (VAE) 时,仅使用均方误差 (MSE) 损失无法快速收敛到令人满意的结果。因此引入欧氏距离损失 (DIS)。 在相同的优化时间内,结合两种损失函数能得到更好的结果。
相似工作对比(原创)
AnimateAnyMesh是同期相似的工作。相同点:
- 驱动任意拓扑与内容的Mesh。
- 把Mesh序列分解为初始点云和每个顶点的运动路径,通过重建顶点的运动路径,叠加到初始点云后,得到被驱动的Mesh。
- 以顶点顺序、数量无关的方法对Mesh进行编码,表达为隐空间向量。生成模型在隐空间是完成。
- 提供了一个4D Mesh数据集。
不同点:
| 本文 | AnimateAnyMesh | |
|---|---|---|
| Mesh编码方式 | Self Attention + Cross Attention + VAE | Latent Set + Transformer VAE |
| 生成模型 | 修正流 | diffusion |