SIMBICON: Simple Biped Locomotion Control
论文信息
- 标题:SIMBICON: Simple Biped Locomotion Control
- 作者:KangKang Yin, Kevin Loken, Michiel van de Panne(英属哥伦比亚大学)
- 发表:ACM Transactions on Graphics, Vol. 26, No. 3, Article 105, July 2007
- DOI:10.1145/1239451.1239556
一句话总结
SIMBICON 用一套极其简单的有限状态机 + 平衡反馈公式,让物理仿真的二足角色(像游戏里的人形角色)能在实时环境中走、跑、跳、转向,还能被推倒后自己稳住。
背景:为什么控制双足行走这么难?
想象一下,你让一个机器人在物理引擎里走路。它的身体有关节、有质量、会受重力,还会和地面碰撞。如果不给它一个"控制器",它就会直接倒下。
控制双足行走之所以困难,是因为:
┌──────────────────────────────────────────┐
│ 双足行走的难点 │
│ │
│ 1. 不稳定 —— 人在行走中大部分时间只有 │
│ 一只脚着地,随时可能摔倒 │
│ │
│ 2. 欠驱动 —— 脚对地面没有主动控制力 │
│ │
│ 3. 高维度 —— 3D人体有30+个关节自由度 │
│ │
│ 4. 接触复杂 —— 脚着地时有冲击力 │
└──────────────────────────────────────────┘
之前的方法要么太复杂(轨迹优化、零力矩点控制),要么不够通用(只能走直线,不能应对推力)。
核心思想:三个简单模块组合
SIMBICON 的名字来自 SIMple BIped CONtrol,整个控制策略只有三个部分:
graph TD
A[有限状态机 FSM<br/>规定每个阶段目标姿势] --> D[整体控制器]
B[躯干 + 摆动髋控制<br/>世界坐标系下的方向稳定] --> D
C[平衡反馈<br/>根据重心位置/速度调整落脚点] --> D
D --> E[物理仿真中的双足行走]
模块一:有限状态机(FSM)
什么是有限状态机?
可以把它想象成一个"动作剧本",规定角色在不同阶段应该摆出什么姿势。
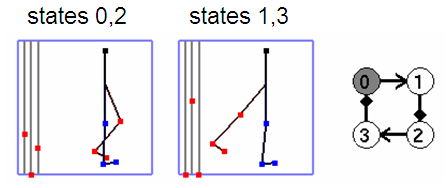
以走路为例,一个完整的步态循环分4个状态:
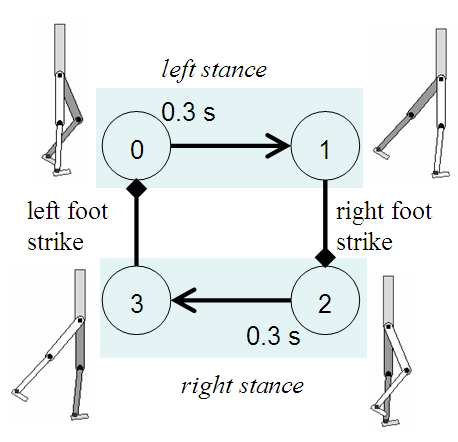
状态0 → 状态1 → 状态2 → 状态3 → 回到状态0
右腿 右腿 左腿 左腿
抬起 落地 抬起 落地
(计时) (脚触地) (计时) (脚触地)
每个状态里,角色的每个关节都有一个"目标角度"。控制器用 PD控制器 让关节趋向目标角度:
$$\tau = k_p(\theta_d - \theta) - k_d\dot{\theta}$$
- (\tau) 是关节施加的力矩(扭力)
- (\theta_d) 是目标角度
- (\theta) 是当前角度
- (k_p, k_d) 是弹簧-阻尼增益参数
通俗解释:就像弹簧一样,目标角度是弹簧的自然长度,关节偏离越多,拉回的力越大;同时加阻尼防止抖动。
状态转换条件:
- 固定时间后转换(如摆腿阶段持续0.3秒)
- 或脚碰到地面时转换(
fc= foot contact)
模块二:躯干 + 摆动髋的世界坐标控制
这是 SIMBICON 的一个关键创新。普通方法里,所有关节目标角度都是相对父关节的局部角度。但躯干和摆动腿的髋关节采用世界坐标系的目标角度。
为什么这样做?
传统方法:
躯干目标角度 = 相对于骨盆的角度
→ 如果骨盆倾斜了,躯干也跟着倾斜 → 容易失衡
SIMBICON方法:
躯干目标角度 = 相对于世界坐标系(垂直方向)
→ 无论骨盆怎么动,躯干始终尝试保持直立
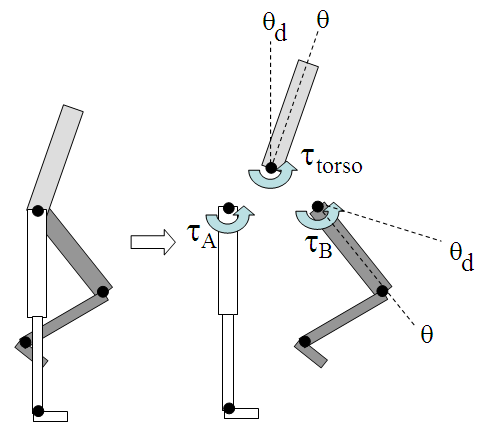
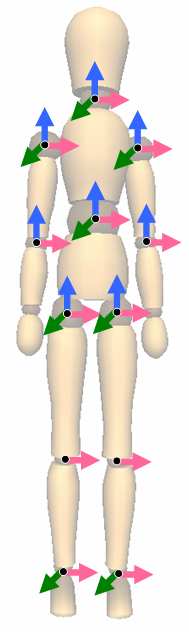
具体力矩计算(图(a)展示了三者关系):
- 摆动髋力矩 (\tau_B):用世界坐标PD控制器计算
- 躯干力矩 (\tau_{torso}):用世界坐标PD控制器计算
- 支撑髋力矩 (\tau_A = -\tau_{torso} - \tau_B)(自由变量,由上面两个推导出来)
通俗解释:想象你在走路时手里拿着一杯水。你的身体倾斜,但手要保持水平,所以手腕会自动调整。这里躯干就是那杯水,始终相对于地面保持目标方向。
模块三:平衡反馈(最关键!)
这是 SIMBICON 最核心、也最优雅的部分。
核心公式:
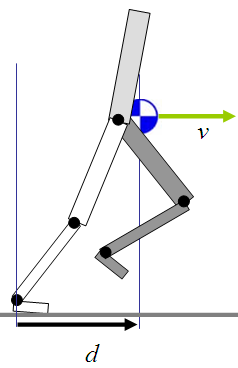
$$\theta_d = \theta_{d0} + c_d \cdot d + c_v \cdot v$$
- (\theta_{d0}):FSM规定的默认摆动髋目标角度
- (d):重心(COM)相对于支撑脚踝的水平距离
- (v):重心的水平速度
- (c_d, c_v):反馈增益参数
为什么同时用位置和速度?
只用速度不够!看这个例子:
场景:原地踏步,期望速度 v = 0
情况A:重心在支撑脚前方 d = +10cm
→ 需要赶紧往前迈一步!
情况B:重心在支撑脚后方 d = -10cm
→ 需要赶紧往后迈一步!
如果只看速度(都是0),完全区分不了这两种情况
只有(d, v)一起看,才能知道当前步态的完整"相位"
通俗比喻:就像骑自行车,你不仅要看现在偏向哪里(位置d),还要看倾斜的速度有多快(速度v),才能决定该怎么打方向盘。
3D扩展:同样的反馈在矢状面(前后方向)和冠状面(左右方向)都分别应用,各自独立调整落脚位置。
控制器的两种设计方式
方式一:手动设计
通过一个图形界面(GUI)交互式地调整参数:
- 左边三个滑块:控制状态持续时间 (\Delta t)、位置增益 (c_d)、速度增益 (c_v)
- 右边:直接拖拽棍型人物的各关节目标角度
最重要的参数(只需调这几个):
- 每个状态的持续时间 (\Delta t)
- 摆动髋目标角度
- 摆动膝目标角度
表1 列出了所有手动设计的2D和3D步态参数(走、跑、跳、倒退走等12种步态)。
方式二:从动捕数据生成
- 给定3-7个动捕行走周期
- 用傅里叶分析提取步态周期 (T)
- 用主要频率分量重建平滑的周期运动 (\Theta)
- 用 (\Theta) 替代FSM中的固定目标姿势
结果:动捕风格 + 物理平衡 = 可应对外力的风格化行走
反馈误差学习(FEL)
问题:高增益PD控制虽然能跟踪目标轨迹,但动作显得"僵硬",而且躯干会因为总是"被动反应"而产生不自然的晃动。
人类运动的启发:人类在熟悉的动作中依赖前馈力矩(预测性地提前施力),反馈只做微调。
FEL的做法:
graph LR
A[观察反馈力矩<br/>vfb] -->|逐步学习| B[学习前馈力矩<br/>vff]
B --> C[两者相加施加]
C --> D[反馈力矩越来越小<br/>动作越来越流畅]
学习更新公式:
$$v'{ff} = (1-\alpha)v{ff} + \alpha(v_{ff} + v_{fb})$$
- (\alpha = 0.1)(学习率)
- 把步态划分成 N=20~1000 个相位区间,每个区间独立学习
效果:
- 躯干晃动幅度从 5° 降至 0.5°
- PD增益可以降低,动作更自然
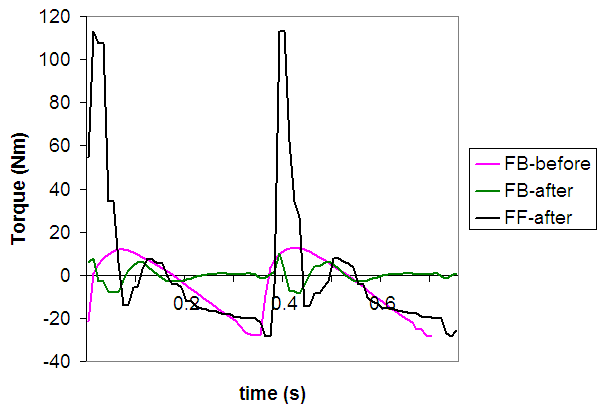
图中显示:学习前反馈力矩大幅波动(蓝线),学习后反馈力矩(红线)大幅减小,被前馈力矩(绿线)取代。
实验结果
2D双足结果
设计了12种周期步态,全部实时运行:
| 步态类型 | 特点 |
|---|---|
| 普通行走 (walk) | 标准步态 |
| 原地踏步 (in-place walk) | 零速度平衡 |
| 快步走 (fast walk) | 加速前进 |
| 高抬腿走 (highstep walk) | 大幅抬腿 |
| 弯腰走 (bent walk) | 前倾姿态 |
| 蹲走 (crouch walk) | 膝盖弯曲 |
| 剪刀跳 (scissor hop) | 腿交叉跳 |
| 倒退走 (backwards walk) | 向后行走 |
| 快跑 (fast run) | 高速奔跑 |
| 普通跑 (run) | 常规奔跑 |
| 跳跃步 (skipping) | 跳跃步态 |
鲁棒性测试:
- 走路控制器可承受 600N(前向)/ 500N(后向)、0.1s 的推力
- 可应对 20cm 的台阶和 ±6° 的坡度
3D双足结果
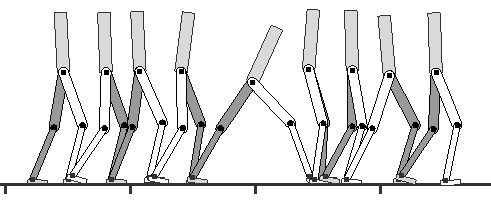 (左:2D模型6个内部自由度;右:3D模型28个内部自由度)
(左:2D模型6个内部自由度;右:3D模型28个内部自由度)
- 手动设计:双脚跳跃、三种前向行走、爬坡(20°)、侧走太极动作、跳跃步等
- 最大可恢复推力(八个方向):
前方: 340N, 后方: 270N, 左方: 240N, 右方: 330N(近似值)
动捕风格化结果
从动捕数据生成了7种控制器:
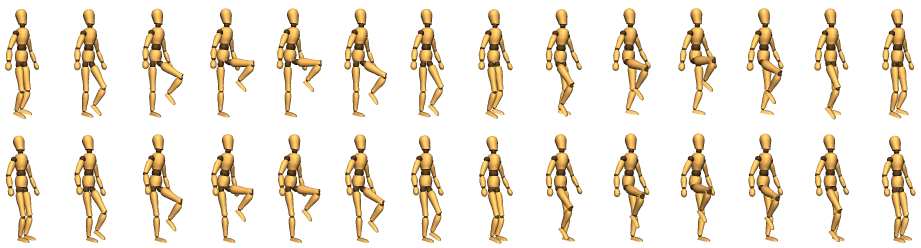 (上排:原始动捕数据;下排:控制器生成的物理仿真运动)
(上排:原始动捕数据;下排:控制器生成的物理仿真运动)
四种行走风格:高抬腿走、宽步距走、后退走、弯腰走
控制器之间的过渡
控制器绑定到按键,用户可以实时切换!过渡发生在状态 n 到 n+1 的边界。
一个完整的过渡序列示例:
走 → 原地踏步 → 站立 → 后空翻 → 原地踏步 → 走 →
大步走 → 走 → 原地踏步 → 高抬腿走 → 原地踏步 →
剪刀跳 → 走 → 跳跃 → 走 → 弯腰走 → 走 →
蹲走 → 走 → 原地踏步 → 倒退走 → 跑 → 快跑
注意:不是所有过渡都能直接进行,需要步态状态的"吸引域"(basin of attraction)有重叠。
参数稳定性分析
对 (c_d) 和 (c_v) 的稳定范围:
| 参数 | 矢状面(前后) | 冠状面(左右) |
|---|---|---|
| (c_d) | [-0.71, 1.4] | [-1.29, 1.13] |
| (c_v) | [0.03, 0.59] | [-0.06, 0.48] |
- (c_v) 太小 → 速度失控直到倒下
- (c_v) 太大 → 前后/左右摇摆越来越大直到倒下
- 参数接近边界 → 可能出现"倍周期分岔"(步态变为两步一循环)
系统参数(仿真配置)
| 参数 | 2D模型 | 3D模型 |
|---|---|---|
| PD增益 (k_p) | 300 Nm/rad | 300~1000 Nm/rad |
| PD增益 (k_d) | 30 Nms/rad | (0.1 k_p) |
| 摩擦系数 | 0.65 | 0.8 |
| 时间步长 | 0.0001s | 0.005s |
| 实时倍率 | 5× 实时 | 1.2× 实时 |
局限性
- 动捕流程未完全自动化:反馈增益 (c_d, c_v) 仍需手动调
- 能量效率未优化:步态看起来自然但能耗未考虑
- 没有反应时延模型:真实人类有约150ms神经延迟
- 高难动作不适用:翻跟头、跳跃需要精确起跳动量,FSM+平衡反馈不够
- 楼梯问题:控制器"看不见"前方台阶,脚尖碰到台阶可能摔倒
与同期工作的对比
| 方法 | 优势 | 劣势 |
|---|---|---|
| ZMP控制(ASIMO等) | 工程上可靠 | 大扰动时需要额外规划 |
| 轨迹优化 | 可得最优步态 | 计算慢,不实时 |
| 强化学习 | 原理上可学习 | 2007年时高维状态空间难处理 |
| SIMBICON | 简单、实时、多步态 | 复杂动作有限 |
贡献总结
┌─────────────────────────────────────────────┐
│ SIMBICON 的三大贡献 │
│ │
│ 1. 首个展示大量集成双足技能的框架 │
│ (走/跑/跳/转向/推力恢复全都有) │
│ │
│ 2. 从动捕数据构建鲁棒风格化控制器 │
│ (保留风格的同时能应对真实物理扰动) │
│ │
│ 3. 将反馈误差学习用于复杂动态系统 │
│ (前馈力矩让动作更流畅自然) │
└─────────────────────────────────────────────┘
个人理解:为什么这篇论文重要?
这篇2007年的论文在角色动画领域具有里程碑意义,原因如下:
-
极简设计:核心公式就一行 (\theta_d = \theta_{d0} + c_d d + c_v v),却产生了惊人的效果
-
实时性:游戏和交互应用需要实时控制,SIMBICON 做到了
-
奠基性:后来大量的角色动画物理控制工作(包括 DeepMimic、AMP 等深度强化学习方法)都在思考如何超越 SIMBICON 的局限性,它是一个重要的基线
-
直觉正确:用重心的位置和速度来调整落脚点,本质上模拟了人类行走的核心平衡机制
参考文献(精选)
- Raibert & Hodgins 1991 - 早期跳跃/奔跑控制,提出了速度控制和摆脚落点思想
- Faloutsos et al. 2001 - 可组合控制器架构
- Kawato et al. 1987 - 反馈误差学习(FEL)的原始提出
- Laszlo et al. 1996 - 极限环控制用于平衡