正向运动学 Forward kinematic [1:00:06]
关节的定义
| name | degree | example |
|---|---|---|
| Pin | 1D旋转 | 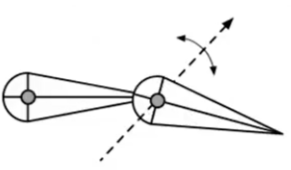 |
| Ball | 2D旋转 |  |
| Prismatic joint | 旋转 + 平移 |  |
Fk 要解决的问题。[1:02:19]

已知每个关节的旋转角度,求末端结点的位置。在本例中,已知\(\theta_1\)和\(\theta_2\),求p。
✅ 视频上给了这个例子的计算公式,如果关节多了就会很复杂。实际上用旋转矩阵来算会非常方便。
优点:定义直观,实现简单
缺点:通过角度来控制不直观
逆向运动学
已知末端的位置,调整关节角度,使末端处于预期的位置。在本例中,已知p,求\(\theta_1\)和\(\theta_2\)。[1:04:40]
局限性:计算复杂、解不唯一、可能无解。
通常被当作优化问题来解决。
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES101_mdbook/