光线与显式曲面求交
最常见的显式曲面是Mesh。
基本方法
依次判断与曲面上的每个三角形求交。
速度非常慢!!!
因此需要使用一些方法来加速。
Bounding Volumes 包围盒
一种可以把物体包围起来的简单几何形状。可用于简体计算。

先判断光线与BV是否相交,然后再求与物体的相交情况。
最常见的BV是长方体。长方体可以看作是3个不同的对面(slab)形成的交集。
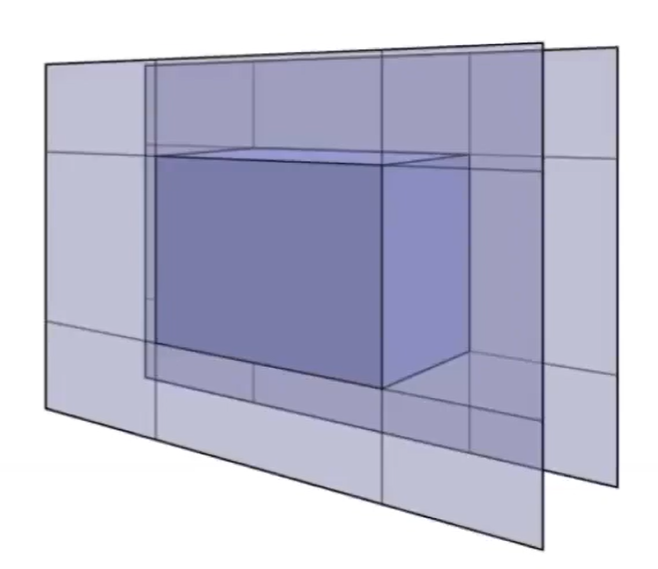

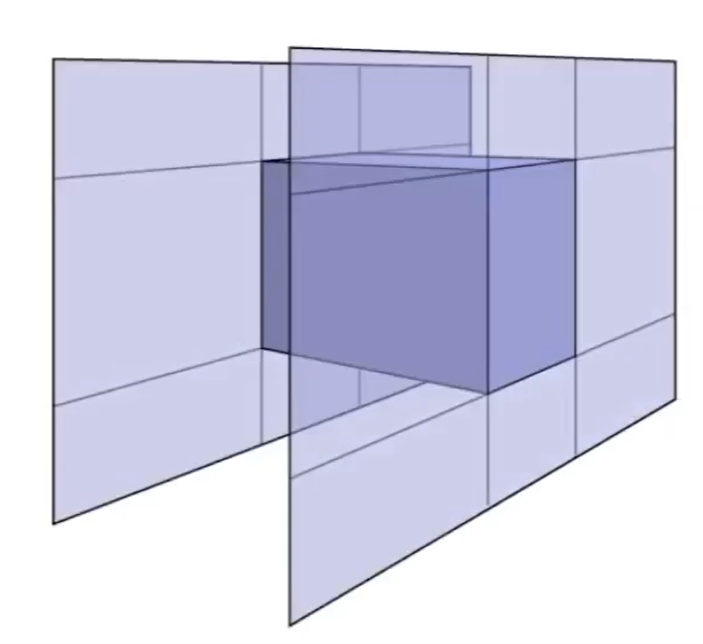
因此又被称为AABB。AABB = Axis Aligned Bounding Box。
光线与AABB是否相交
以二维情况为例,长方形为2个不同的对面(slab)形成的交集。
- 求光线与x轴方向上的两个对面相交的时间,tmin和tmax

- 求光线与y轴方向上的两个对面相交的时间,tmin和tmax

- 光线进入 AABB 的时间为所有[tmin, tmax] 的交集
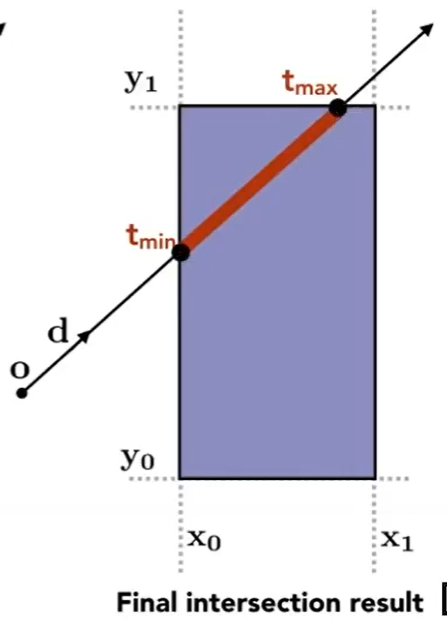
- 分析光线与AABB的相交情况
tenter = max{tmin}, texit = min{tmax}
tenter < texit && texit > 0⇒ 光线与AABB 相交
texit < 0 || tenter > texit ⇒ 不相交
tenter < 0 < texit ⇒ 光源在 AABB 内
❗ 以上方法对三维同样适用。计算每对平面的tmin和tmax,然后求交集。
💡 对于凸多边形(体),判断点是否在内部,常规方法是依次判断点是否在边(面)的同一侧。但AABB的特点在于两条边(面)是平行的,因此可以一次判断点跟两条边(面)的关系。
求光线与slab相交的时间
Q:为什么要用 AABB? A:光线与Axis Aligned平面求交的计算简单
| 普通平面 | AA平面 |
|---|---|
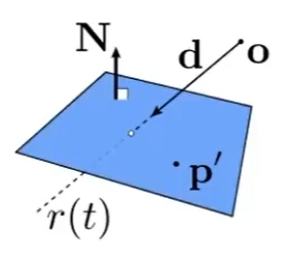 | 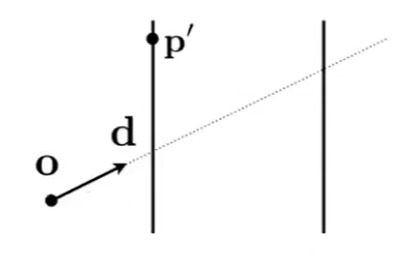 |
| \(t = \frac{(p'- o) \dot N}{d \dot N}\) | \(t = \frac{(p'_x- o_x) }{d_x}\) |
利用 AABB 加速 场景中的光线与所有物体求交的过程
均匀的格子 Uniform Grids
✅ 算法前提:光线与 Grid 求交很快,与 object 求交很慢 💡 对于复杂操作,先进行快而粗的处理,再进行慢而精的处理,是常见做法。也可以是两者同时进行,前者相当于剪枝。
所设有以下的场景:
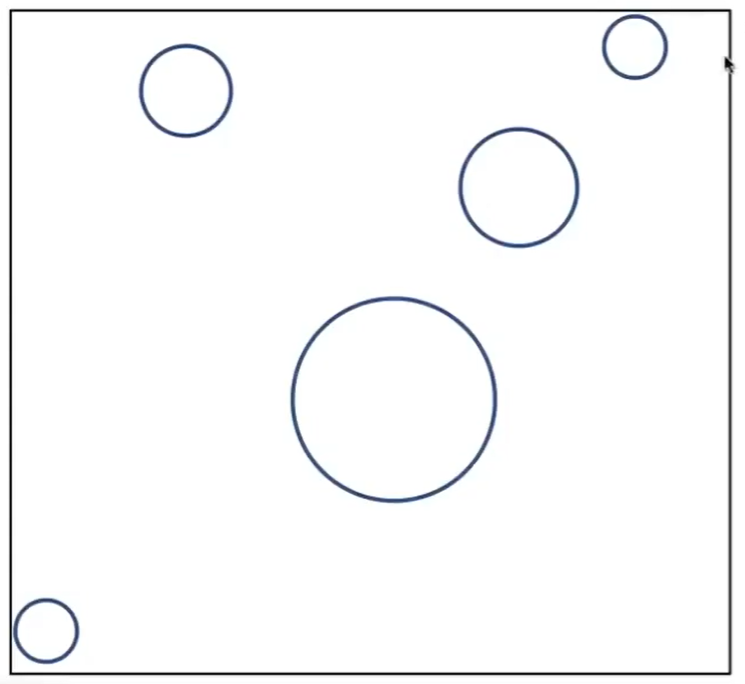
- 找到场景的 Bounding Volumn
📌上图中的黑色边框就是BV
- BV划分成格子
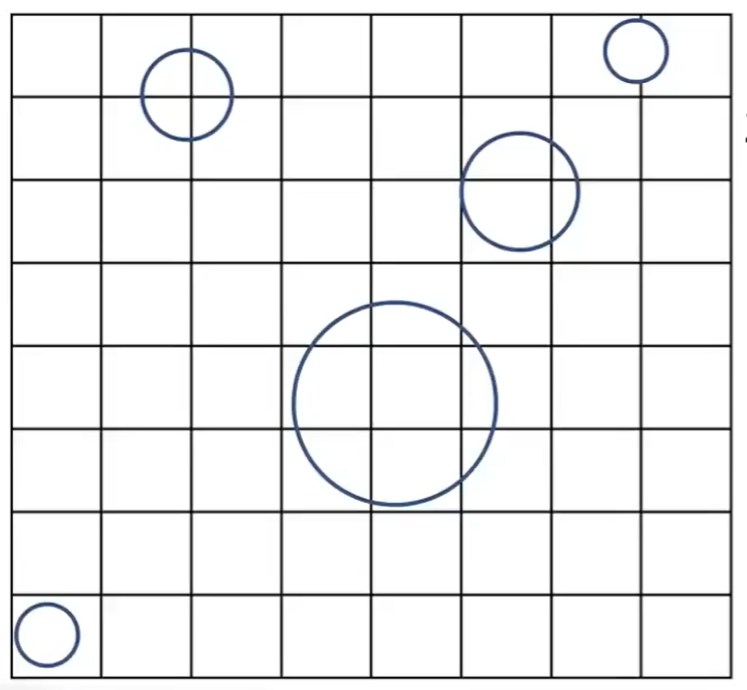
- 判断每个 Grid 是否有物体,即判断格子和物体表面是否相交
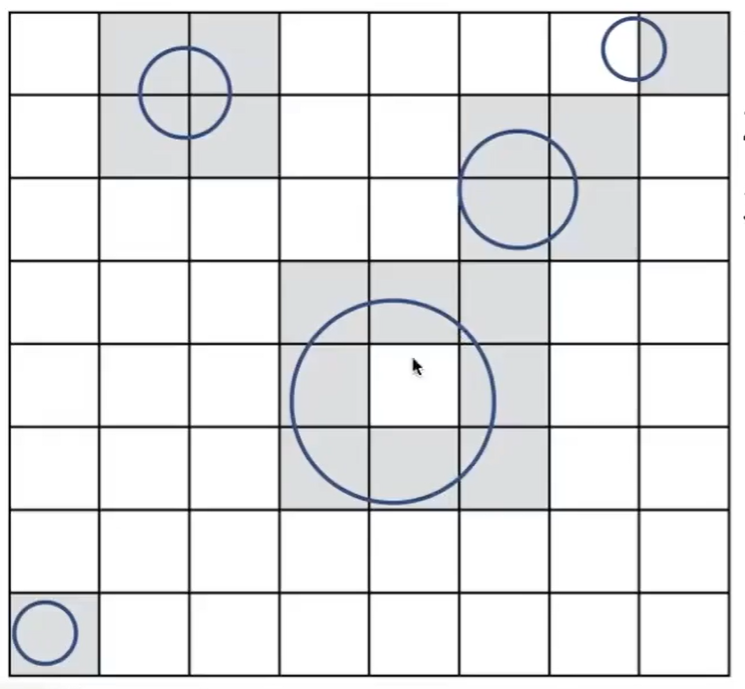
- 判断光线与 Grid 是否相交,
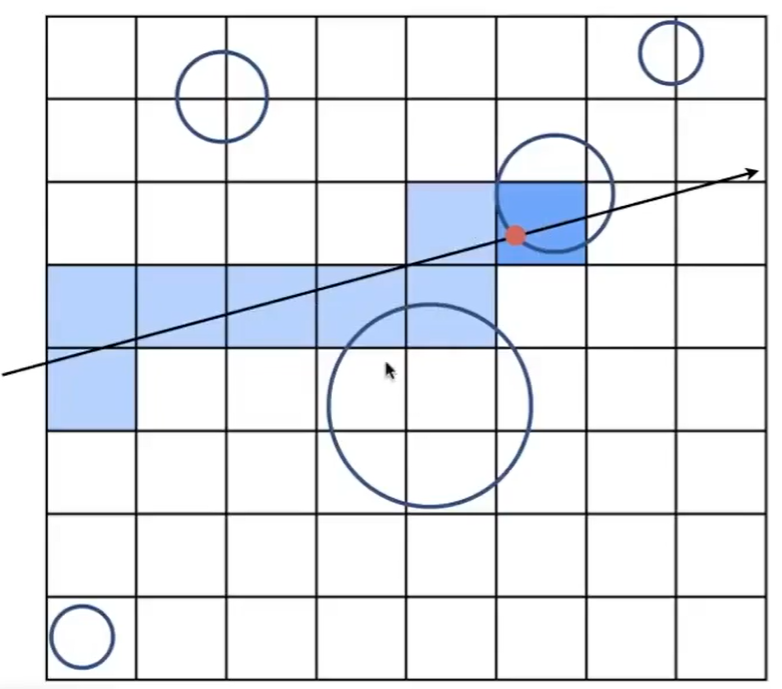
- 如果Grid内有 object且光线与Grid相交,再计算光线与 grid 内的 object 是否相交
算法特点:
- grid 不能太疏或密
- 适用于 object 的大小接近且位置均匀
- 不适用于 object 分布不均匀的场景
❓ 什么是位置均匀的?我的理解是稀疏,也就是通过AABB排除的部分越多越好。
空间划分 Spatial Partition
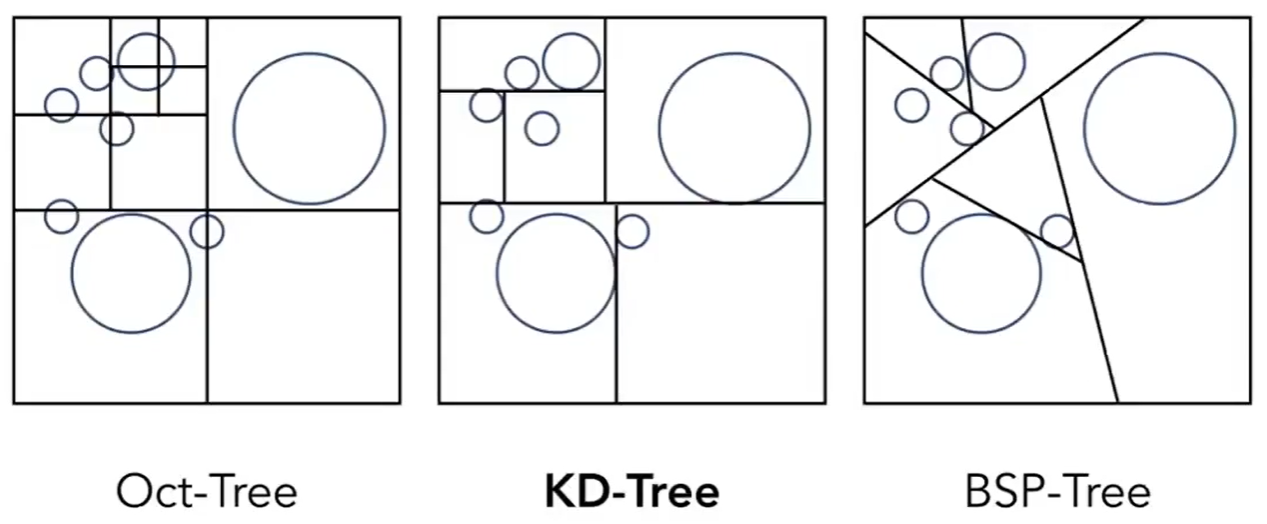
- Octree:八叉树,仅在必要的时候继续切,每次切成同样大小的八块。高维度时每一次都要划分出很多块,出现维度灾难。
- KD tree:与八叉树的区别是,每次只选择沿着一个轴方向进行切分,且不一定从中间切
- BSP tree:与KD tree的区别是,不一定沿着轴方向切。因此在计算光线与平面的交点时没那么方便,且维度越高越难计算。
视频以KD Tree 为例子。
构造KD Tree

- 中间结点
划分轴:x,y,z轴轮流
划分点:根据特定的策略选择
child: 2个
object: 不存 object 数据
- 叶子结色
存 list of objects.
Traverse.
递归进行。
如果光线与某个中间结点相交,则继续判断中间结果的子结点,否则跳过。
如果光线与某个叶子结果相交,则继续与叶子中存储的所有objects计算,否则跳过。
局限性
- 如何判断AABB包围盒与objects中的三角形相交。
- object 可能存在于多个叶子结点中
✅ 基于空间划分,obj会重复。基于obj划分,空间会重复。
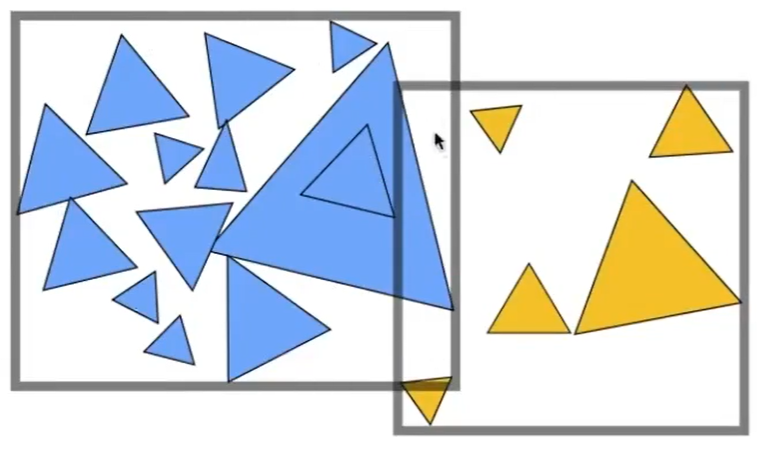
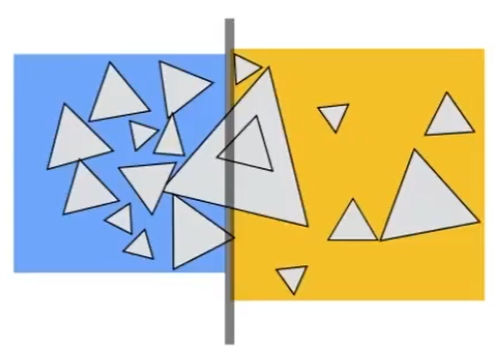
物体划分 Object Partition
BVH:Bounding Volumn Hierarchy
优点:解决以上2个问题
局限性: BV 有重叠,好的划分使重叠尽量少
Create
- 计算 B V
✅ 对所有objects求包围盒的过程非常简单,解决了“判断AABB包围盒与objects中的三角形相交”的问题。
- 对BV内的object划分
✅ 对object进行划分,解决了“object 可能存在于多个叶子结点中”的问题。
✅ 已知BV,挑出在BV内的obj;已知obj,画出obj外的BV。
以上两步交替进行
| 划分 | 生成树 |
|---|---|
 |  |
 | 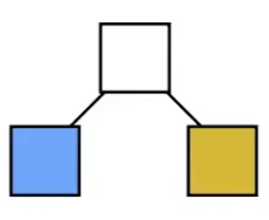 |
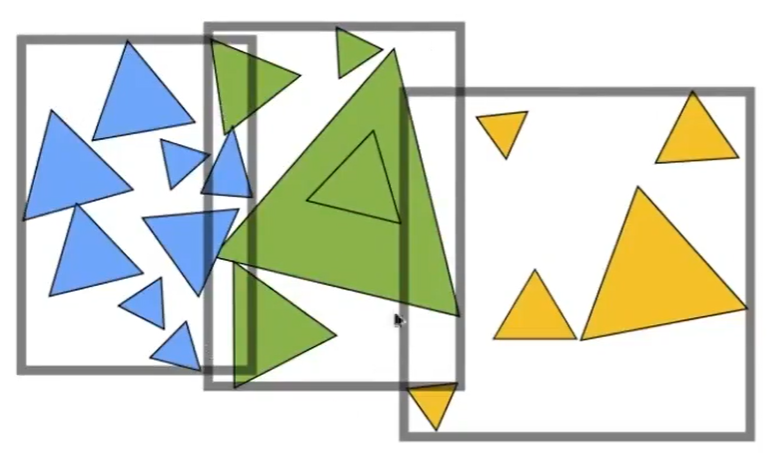 | 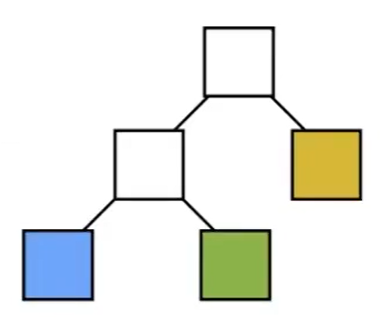 |
但BVH引入了空间的相交。如何划分是效率的关键,好的划分应该让空间的相交尽量地少。
通常选择对最长的轴进行划分,取中间的object作为划分点。当BV中的三角形个数少于门限时停止。
🔎 给一堆无序的数,快速选择算法可以在O(n)的时间点找到第i大的数。
数据结构
- 中间结点:
包围盒、child: 2个
- 叶子结色
存 list of objects.
Traverse
同上
KD Tree VS. BVH

本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES101_mdbook/