背景
有多个物体,每个物体都有多个三角形,因此要处理摭挡问题。
画家算法
原理
由远及近的在画布上添加新物体,新添加的物体将已有的物体覆盖
主要步骤
- 由远即近排序 O(nlogn)
- 依次光栅化
局限性:
- 难以决定被画对象的深度,深度估计错了,排序就错了,画出来就不对
- 无法处理深度嵌套的场景

Z-Buffer 算法
名称:depth buffer, Z buffer,或深度缓存
📌 可以解决画家算法无法决定深度的局限性
原理
不基于三角形的深度,而是基于像素的深度
预处理
由于MVP之后,约定摄像机在坐标原点,物体在视角的z轴负方向,因此物体的z都是负的。为了便于计算,物体上每个点的Z坐标都取其绝对值(深度)。
因此:
- Z(depth) > 0
- Z(depth) 小-->近, Z 大-->远
- 深度是一个物体距离摄像机的Z轴距离的绝对值。
具体步骤
算法过程中维护两个数据:
- frame buffer:存每个像素点当前绘制的像素值。当算法完成时,这里面的数据就是最终输出结果。
- depth buffer:存每个像素点对应的物体上的最小的depth(最近)。当发现在这个像素点上有更近的物体时更新。
两个buffer都是逐像素的,因此将buffer数据可视化。
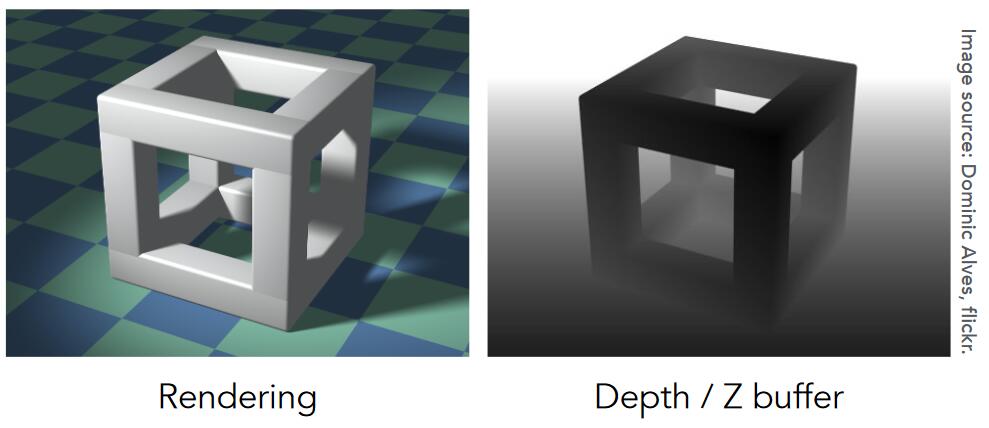

👆 图中,A点是距离视点(摄像机)较近的点,所以颜色比较黑,B点是距离视点较远的点,所以颜色比较白。距离视点近的像素点,颜色就比较黑,反之比较白,这就是depth/Z buffer。
伪代码:
Initialize depth buffer to ∞
during rasterization:
for triangle in triangles:
for (x, y, z) in triangle:
if z < zbuffer[x, y]:
framebuffer[x,y] = rgb
zbuffer[x,y] = z
else:
pass
- depth buffer 所有像素初始化为无限远
- 对每个三角形做光栅化,每次绘制三角形时,计算当前像素在三角形上的深度Z 如果Z小于depth buffer上对应点的值,就绘制该点,且更新depth buffer。
📌 深度缓存发生在每个像素内。
算法特点
- 时间复杂为O(n)。
✅
问:为什么能在O(n)复杂度内解决排序问题?
答:这里没有排序。只是找个最值。
- 与三角形的绘制顺序无关,因此适合GPU优化
- 可以与MSAA算法兼容
💡 画家算法是global方法,z-buffer是local方法(贪心)
global要同时考虑所有数据,因此快。local只考虑小范围数据,因此快。
global通常能得到全局最优,但如果只是要一个尽量好(而非最优)的解,考虑到效率、规模的问题,更适合用local。local之间越独立结果越好。
如果global能够完成分解为local,那么毫无疑问选择local,减小问题规模同时能得到最优解。
当前问题属于这一类,因为像素之间是独立的。
local除了能减小问题规模,还可以并行化计算。
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES101_mdbook/