Diffusion on various 3D representations
| ID | Year | Name | Note | Tags | Link |
|---|---|---|---|---|---|
| 2021 | 3D Shape Generation and Completion through Point-Voxel Diffusion | Point-Voxel | |||
| 2019 | Point-Voxel CNN for Efficient 3D Deep Learning | Point-Voxel | |||
| 2022 | Zeng et al., "LION: Latent Point Diffusion Models for 3D Shape Generation" | ||||
| 2022 | Nichol et al., "Point-E: A System for Generating 3D Point Clouds from Complex Prompts | 点云 | |||
| 2022 | Hui et al., "Neural Wavelet-domain Diffusion for 3D Shape Generation | SDF | |||
| 2022 | Chou et al., "DiffusionSDF: Conditional Generative Modeling of Signed Distance Functions | SDF | |||
| 2022 | Shue et al., "3D Neural Field Generation using Triplane Diffusion", arXiv 2022 | Nerf | |||
| 2023 | Yang et al., "Learning a Diffusion Prior for NeRFs", ICLR Workshop 2023 | Nerf | |||
| 2023 | Jun and Nichol, "Shap-E: Generating Conditional 3D Implicit Functions", arXiv 2023 | Nerf |
P12
3D Shape Generation and Completion through Point-Voxel Diffusion
| ID | Year | Name | Note | Tags | Link |
|---|---|---|---|---|---|
| 2021 | 3D Shape Generation and Completion through Point-Voxel Diffusion | A set of points with location information. > ✅ 分支1:逐顶点的 MLP (对应图中 b) ✅ 分支2:VOX 可以看作是低分辨率的 points ✅ 优点是结构化,可用于 CNN ❓ VOX → points,低分辨到高分辨率要怎么做? ❓ 怎么把 voxel 内的点转换为 voxel 的特征? | 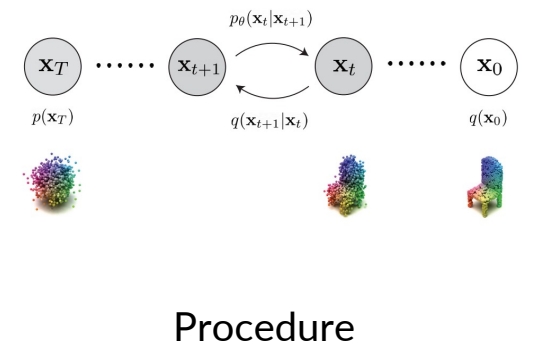 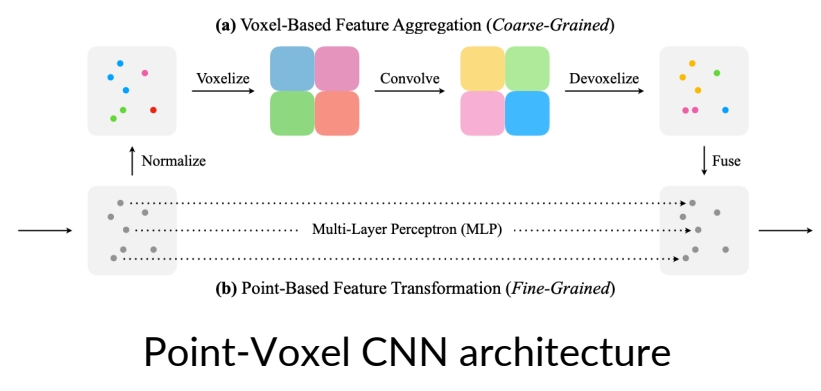 | ||
| 2019 | Point-Voxel CNN for Efficient 3D Deep Learning | ✅ Completion:深度图 → 完整点 ✅ 方法:(1) 基于深度图生成点云 (2) 用 inpainting 技术补全 ✅ generation 和 completion 是两种不同的 task. | 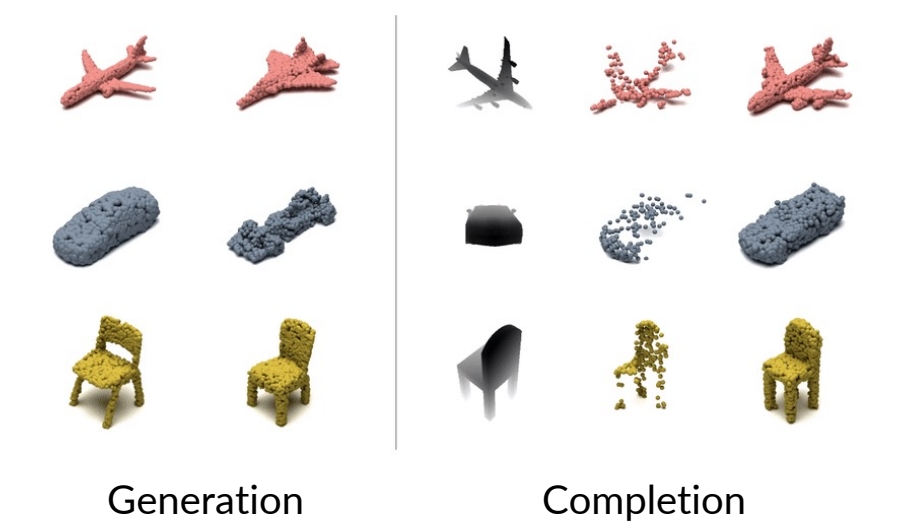 | ||
| 2022 | LION: Latent Point Diffusion Models for 3D Shape Generation | ✅ 1、latent diffusion model for point clouds. ✅ 2、point-voxel CNN 架构,用于把 shape 编码成 latent shape 及 lantent point. ✅ 3、diffusion model 把 latent point 重建出原始点。 | 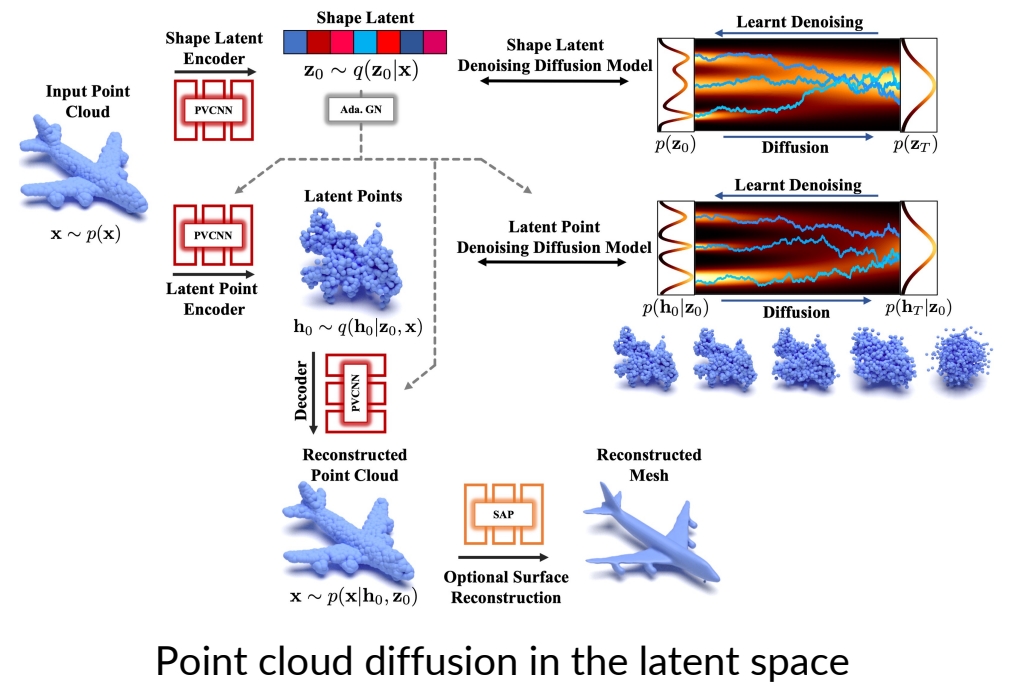 | ||
| 2022 | Point-E: A System for Generating 3D Point Clouds from Complex Prompts | Point-E uses a synthetic view from fine-tuned GLIDE, and then ”lifts” the image to a 3d point cloud. ✅ point E task:文生成点云。 ✅ 第1步:文生图,用 fine-tuned GLIDE ✅ 第2步:图生点,用 transformer-based diffusion model. | 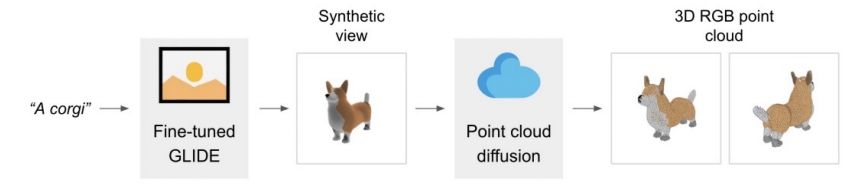 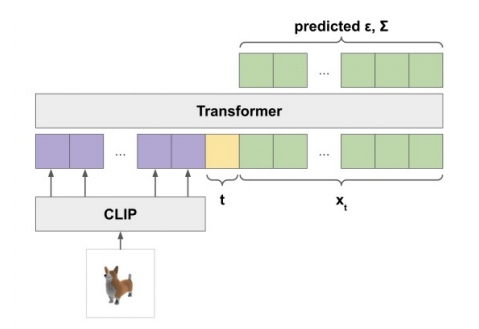 |
P16
Diffusion Models for Signed Distance Functions
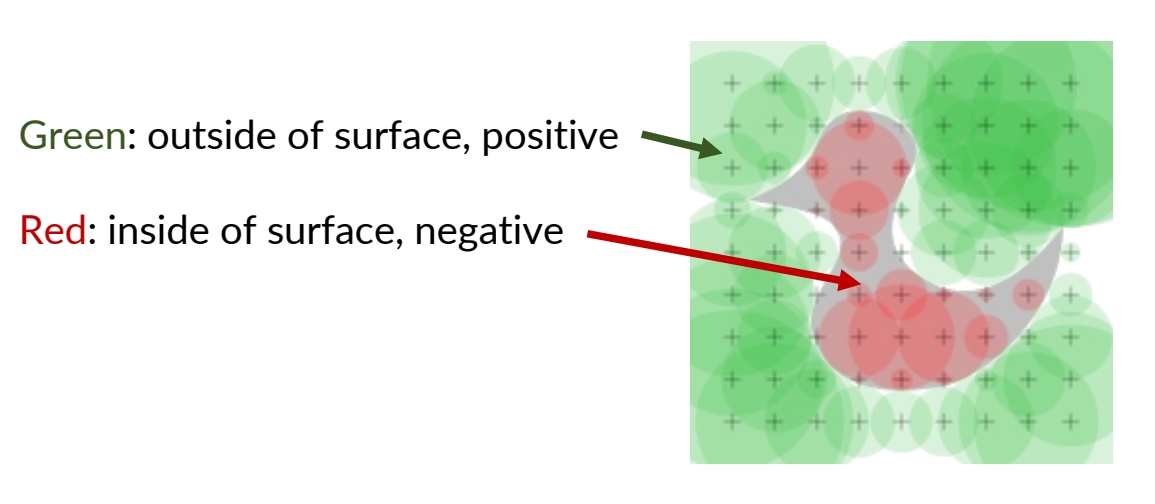
SDF is a function representation of a surface.
For each location x, |SDF(x)| = smallest distance to any point on the surface.
| ID | Year | Name | Note | Tags | Link |
|---|---|---|---|---|---|
| 2022 | Neural Wavelet-domain Diffusion for 3D Shape Generation | - Memory of SDF grows cubically with resolution - Wavelets can be used for compression! - Diffusion for coarse coefficients, then predict detailed ones. ✅ 这里说的 SDF,是用离散的方式来记录每个点的 distance. ✅ Wavelet 把 SDF 变为 coarse 系数,diffusion model 生成 coarse 系数,再通过另一模型变为 detailed |  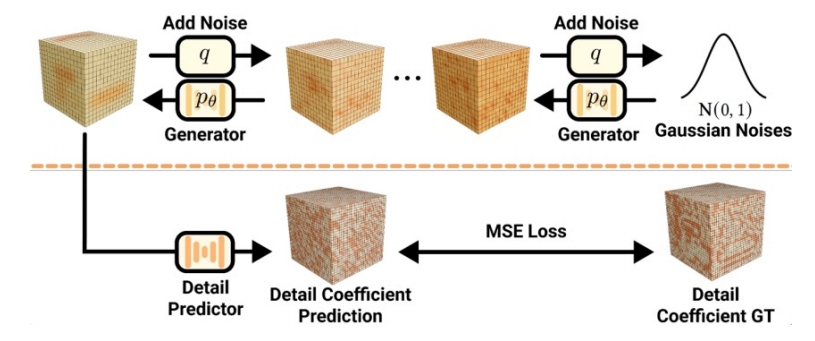 | ||
| 2022 | DiffusionSDF: Conditional Generative Modeling of Signed Distance Functions | Latent space diffusion for SDFs, where conditioning can be provided with cross attention ✅ 原理与上一页相似,只是把 waveles 换成了 VAE. | 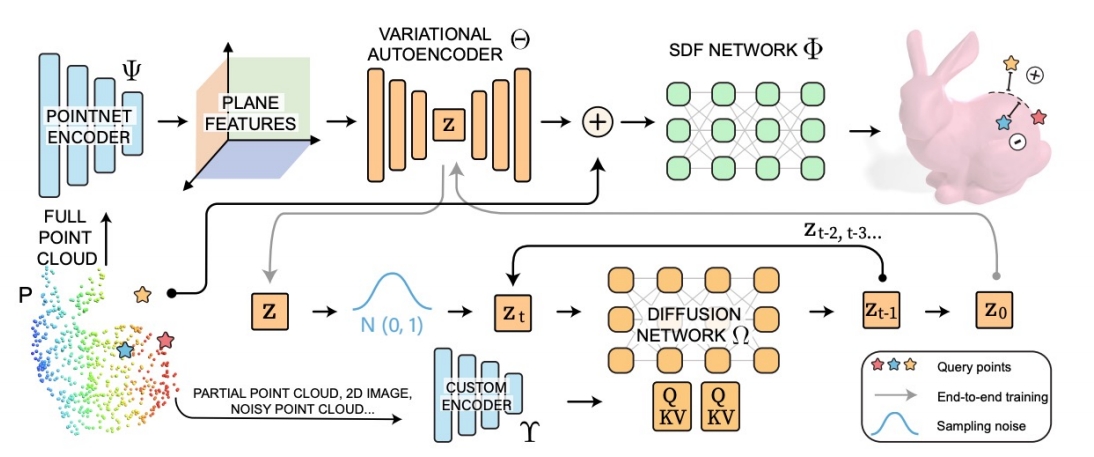 |
P19
Diffusion Models for NeRF
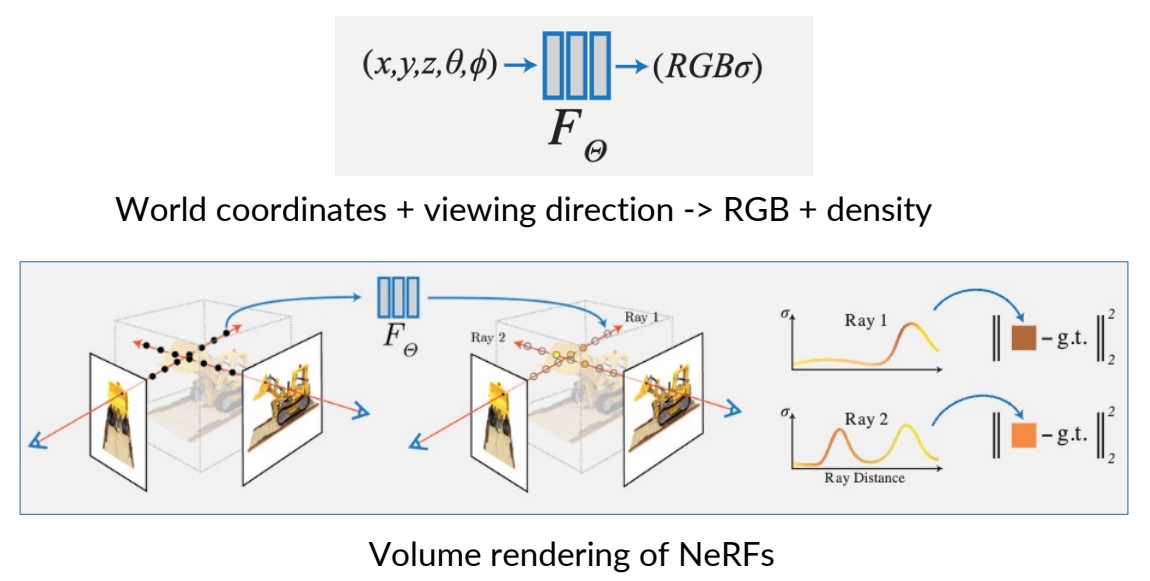
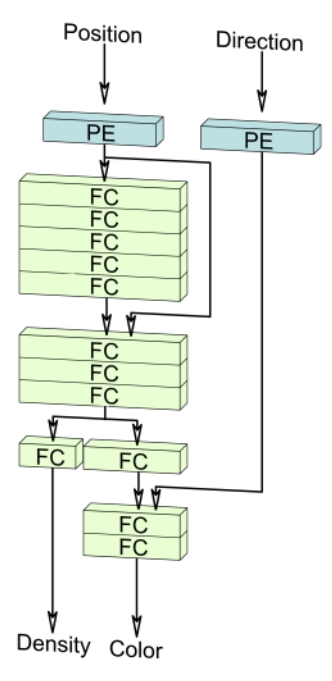
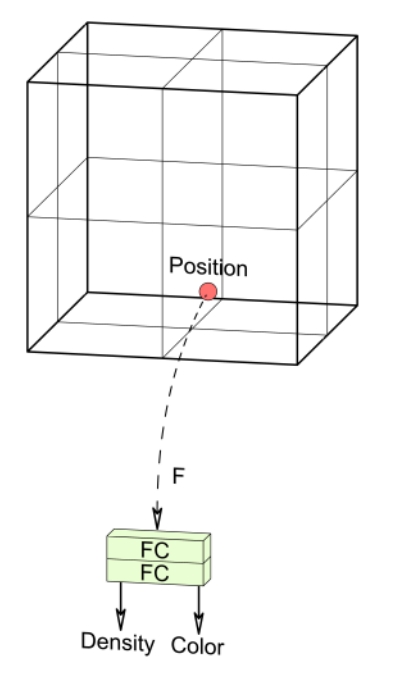
Neural Radiance Fields (NeRF) is another representation of a 3D object.
✅ NeRF:用体的方式来描述 3D 物体
✅ (1) 从 diffusion 中提取 image (2)从 image 计算 loss (3) loss 更新 image (4) image 更新 NeRF.
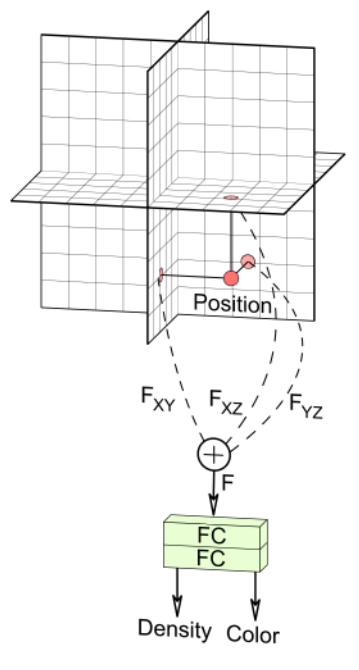
✅ \((x,y,z,\theta ,\phi )\) 是每个点在向量中的表示,其中前三维是 world coordinate,后面两维是 viewing direction
✅ density 描述这个点有多透明。
✅ F 是一个小型的网络,例如 MLP.
P20
NeRF
(Fully implicit)
Voxels
(Explicit / hybrid)
Triplanes
(Factorized, hybrid)
Image from EG3D paper.
P21
✅ Nerf 可以有三种表示形式
- Triplanes, regularized ReLU Fields, the MLP of NeRFs...
- A good representation is important!
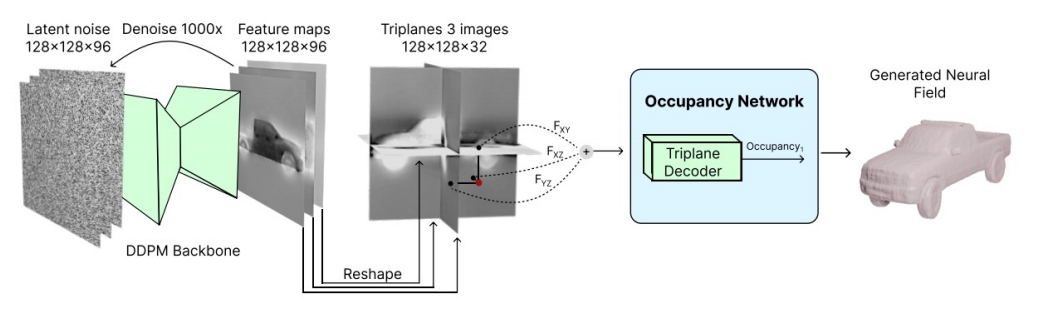
Triplane diffusion
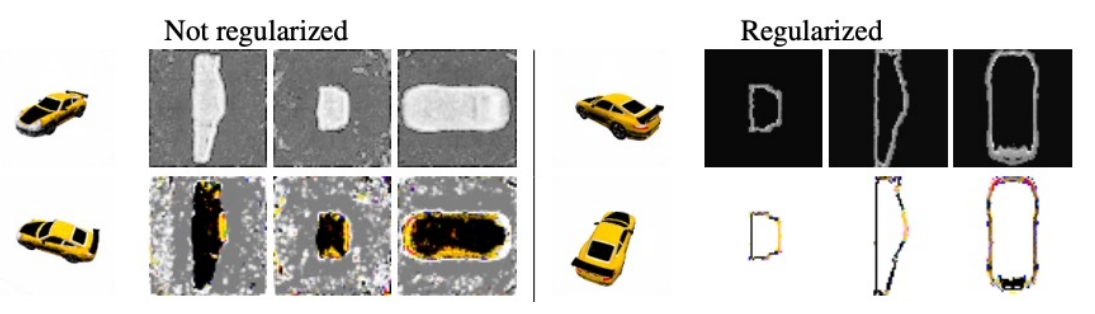
Regularized ReLU Fields
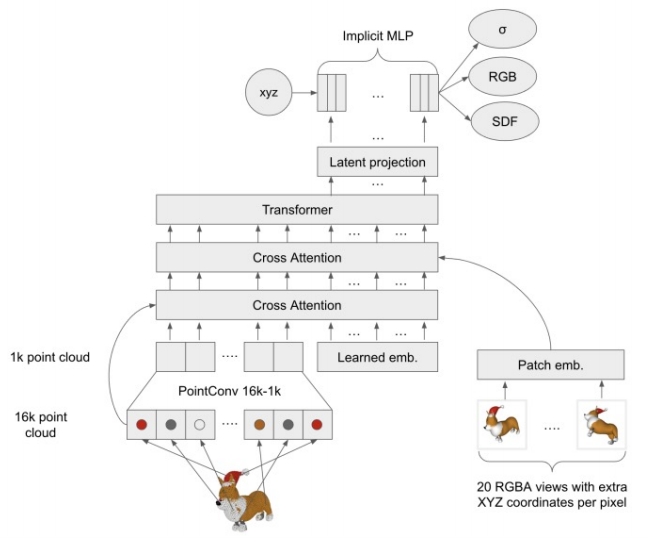
Implicit MLP of NeRFs
Shue et al., "3D Neural Field Generation using Triplane Diffusion", arXiv 2022
Yang et al., "Learning a Diffusion Prior for NeRFs", ICLR Workshop 2023
Jun and Nichol, "Shap-E: Generating Conditional 3D Implicit Functions", arXiv 2023
✅ 这三种表示形式都可以与 diffuson 结合。
✅ 好的表示形式对diffusion 的效果很重要。
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/ImportantArticles/