P1
Flow Matching Basics
P6
WHAT IS FLOW MATCHING?
A scalable method to train flow generative models.
HOW DOES IT WORK?
Train by regressing a velocity, sample by following the velocity
P11
增量生成方法
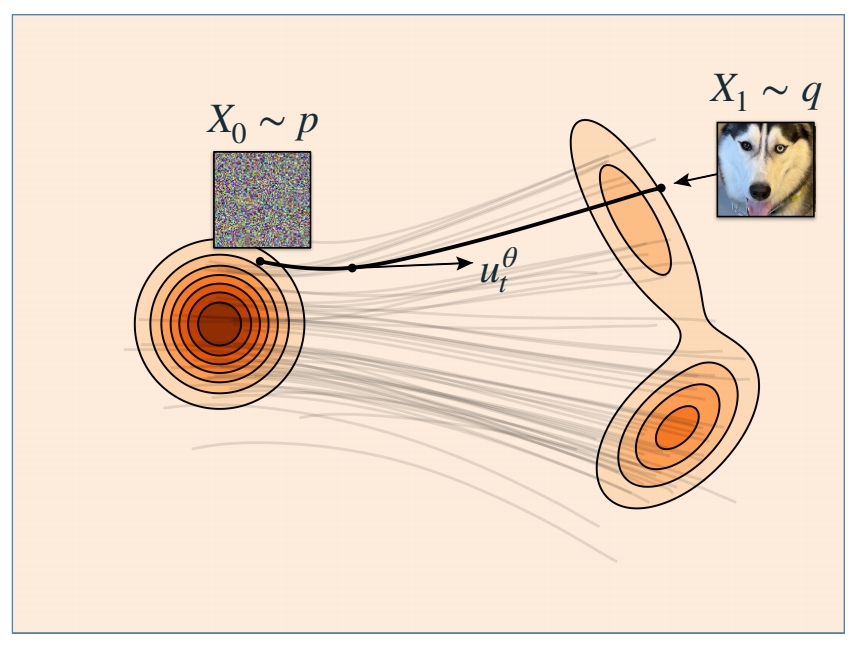
Marginal probability path
flow matching属于增量生成方法,需要学习边缘概率路径。
边缘概率路径是指,任意一个特定的 \(t\) 时刻,\(X_t\) 所属于的分布 \(p_t\)。 即连续时间上的分布簇。
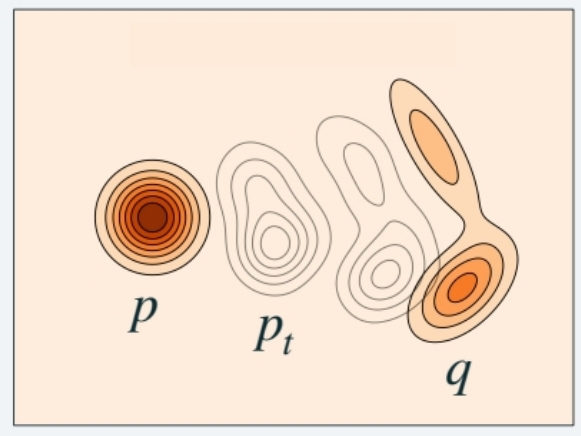
生成模型最重要的是,边缘概率路径以 \(P\) 分布开始,以 \(Q\) 分布结束。
P12
三种增量生成模型的特点
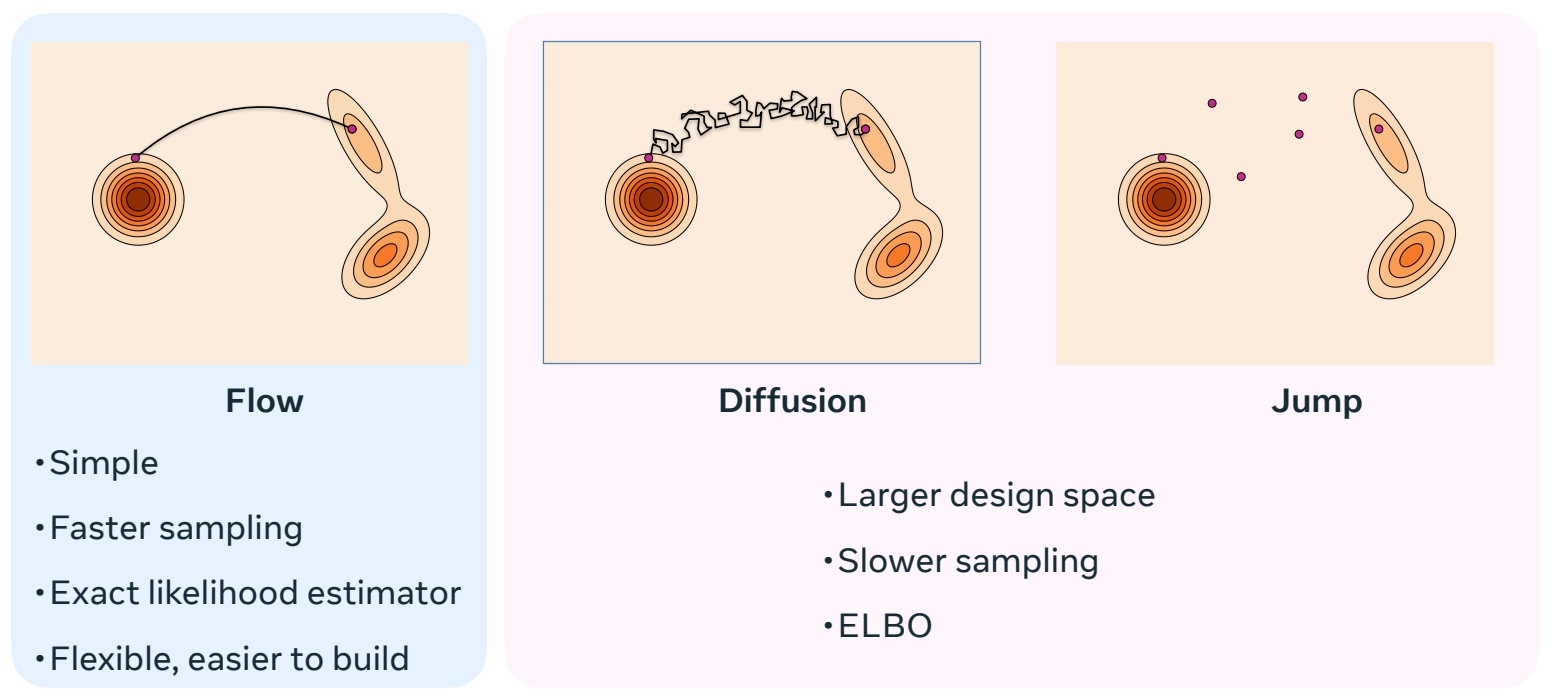
相比于其它增量生成方法,流的特点:(1) 确定性,已知 \(X_t\),那么 \(X_{t+h}\) 是确定的。(2) 平滑
流的优势:(1) sample 速度快 (2) 可以构建模型似然的无偏估计器。
Diffusion 和 Jump 具有更大的设计空间,因此具有更多生成能力。
P13
Flow 生成模型
Flow 的参数化
\(\Psi_t\) 是 flow 生成模型的转移函数。
\(\Psi_t\) 是一个双射函数,因此它可以重塑空间而不丢失信息。
通过对高维空间的 warping,使 \(P\) 分布逐步变为 \(Q\) 分布。
双射函数的特性:
- 一一对应:每个输入对应唯一的输出,且每个输出都被某个输入映射到。
- 可逆性:存在逆函数 \( f^{-1}: Y \to X \),满足 \( f^{-1}(f(x)) = x \) 且 \( f(f^{-1}(y)) = y \)。

flow Model 是一个马尔可夫过程。
马尔可夫过程(Markov Process)是一类具有无记忆性(马尔可夫性质)的随机过程,其核心特点是未来状态仅依赖于当前状态,而与历史状态无关。
直接参数化会遇到的问题
对两个双射函数做线性组合,得到的函数不能保持其双射的特性,因此,基于双射函数的模型难以被参数化。
$$ \alpha X_ {t|1}+\beta X_ {t|2}\ne \Psi _ t(\alpha X_ {t|1}+\beta X_ {t|2}) $$
网络模型中通常包含大量线性组合,激活函数等会破坏双射性的结构,因此很难让网络学到一个双射函数。
“模型的参数化”(Parameterization of a Model)是指用一组可调整的参数(Parameters)来定义模型的结构和功能的过程。它是模型设计的核心步骤,决定了模型如何从输入数据中学习规律、进行预测或生成输出。包括(设计模型结构、连接方式,定义参数如何初始化,哪些参数可以被优化)。
P14
利用速度对流做参数化
因此利用速度对流做参数化。在这里,速度是指 \(P_t\) 分布中的每个 sample 向 \(Q\) 分布中对应 sample 变化的速度(快慢和方向)。
Flow 和 velocity 是可以互相转化的。对 Flow 做微分可以得到 velocity,对 velocily 解常微分方程,可以得到 Flow.
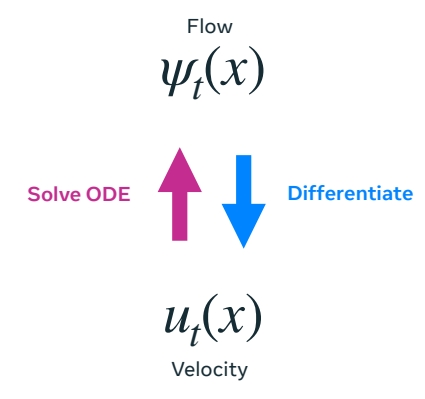
使用速度的好处:速度是线性的,可以相加或分解,因此可以对速度做参数化。
使用速度的缺点:需要对 sample 出速度做 ODE,解出图像。
$$ \frac{d}{dt} \Psi _t(x)=u_t(\Psi _t(x)) $$
$$ \frac{d}{dt}\Psi _t(\alpha X_1+\beta X_2)=\alpha u_t(\psi _t(X_1))+\beta u_t(\psi _t(X_2)) $$
P15
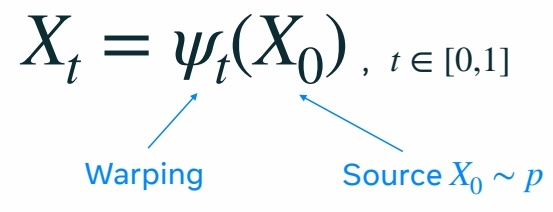
Velocity \(u_t\) generates \(p_t\) if
$$ X _t=\Psi _t(X_0)\sim p_t $$
使用速度来定义边缘概率路径,\(\Psi_t\) 是基于速度的转移函数。
P16
Flow Matching 的训练
学习一个速度模型,由速度得到边缘路径概率 \(P_t\),使得 \(P_0 = P\), \(P_1= Q\)
P17
Sampling a flow model
Flow Matching 的推断:
(1) 从 \(P\) 分布中 sample 一个 noise
(2) 根随速度(解ODE)得到对应在 \(Q\) 分布中的 sample。
$$ \frac{d}{dt} X_t=u^0_t(X_t) $$
Use any ODE numerical solver.
One that works well: Midpoint
P19
Simplest version of Flow Matching
flow matching 的训练
(1) 随机构造源 \(X_0\) 和目标 \(X_1\)。
(2) 在 [0,1] 区间随机采样一个时间步 \(t\)。
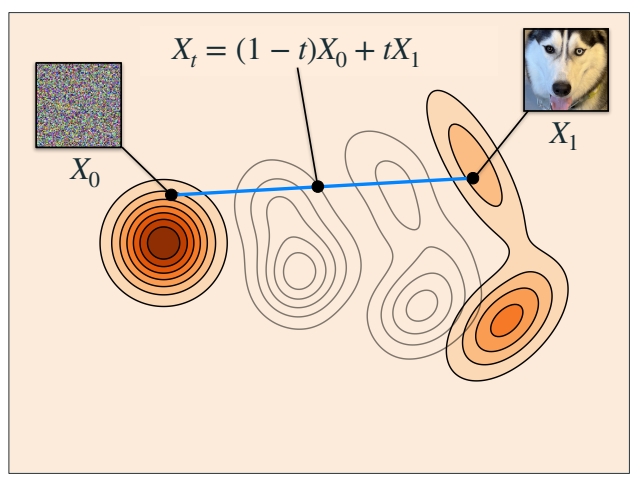
(3) \(X_t\) 是 \(X_0\) 与 \(X_1\) 的线性组合。
(4) \(X_t\) 是网络输入,让网络输出逼近\(X_1-X_0\)。


$$ \mathbb{E } _{t,X_0,X_1}||u_t^0(X_t)-(X_1-X_0)||^2 $$
🔎 "Flow Matching for Generative Modeling" Lipman el al. (2022)
🔎 "Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow" Liu et al. (2022)
🔎 "Building Normalizing Flows with Stochastic Interpolants" Albergo et al. (2022)
P20
这里没有对 \(X_0\) 和 \(X_1\) 所属的分布作限制。 \(X_0\) 和 \(X_1\) 可以是独立的噪声和图像,也可以是具有某种关系(例如黑白与彩色)的 pair data。
Why does it work?
• Build flow from conditional flows
如何从一个更简单的速度或流(称为条件流)构建一个速度或流。条件流是指一些简单的,固定的部分。
• Regress conditional flows
通过观察更简单的条件流来学习复杂的部分。
P21
局部问题
假设目标分布只有 \(X_1\) 这一个点,那么流和速度是这样的。
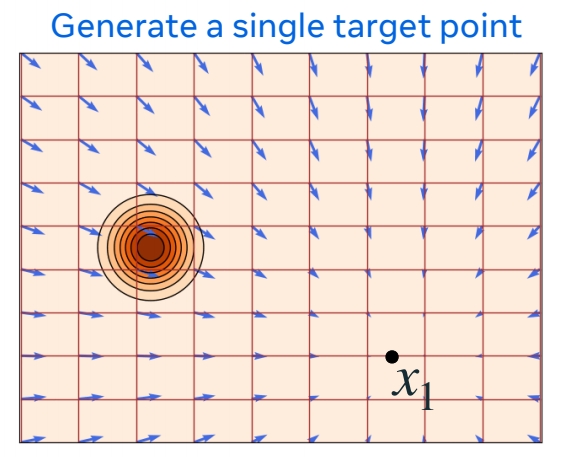
$$ X_t=\Psi _t(X_0|x_1)=(1-t)X_0+tx_1 $$
这是一个条件流。
\(p_{t|1}(x|x_1)\) 是 conditional probability
\(u_t(x|x_1)\) 是 conditional velocity,是常数。
P22
全局问题
实际的 \(Q\) 分布包含很多 \(x_1\) 这样的 sample,每一个 sample 都可以作为一个 condition,得到一个 \(P_{t|条件}\) ,综合所有 \(P_{t|条件}\) 得到的 \(p_t(X)\) 是这 \(P_{t|条件}\) 的期望。可以证明,\(p_t(X)\) 以 \(P\) 开始,以 \(Q\) 结束。对 \(Q\) 分布中的所有的 \(x_1\),对 \(U_t(X|X_1)\) 取平均,得到生成“边缘概率路径”的速度。
\(p_t(x)= \mathbb{E} _ {X_ 1}p_{t|1}(x|X_ 1)\)
\(u_t(X)\) 也可以以这种方式得出。
\(u_t(x)=\mathbb{E} [u_t(X_t|X_1)|X_t=x]\)
这个速度场称为边缘速度。
P23
Theorem*: The marginal velocity (边缘速度) generates the marginal probability path (边缘概率路径)。
以上公式中的期望,实际含义是“平均”。
P24
conditional loss
目标函数:回归边缘速度场。
(1) 直接回归边缘速度场
$$ ℒ_{FM}(θ) = \mathbb{E} _{t,X_t}||u^θ_t (X_t) − u_t(X_t)||^ 2 $$
其中,\(u_t(X_t)\) 是通过许多数据计算出的均值(根据上文中的公式)。
(2) 回归条件速度
$$ ℒ_{CFM}(θ) = \mathbb{E} _{t,X_1,X_t}||u^θ_t (X_t) − u_t(X_t|X_1)||^ 2 $$
Theorem: Losses are equivalent,
$$ \nabla_θℒ_{FM}(θ) = \nabla_θℒ_{CFM}(θ) $$
结论:仅回归条件速度,与直接回归速度相同。
使用条件分布(公式 2)相比于公式 1 的好处是,可以逐个样本去计算,而不需要对整个数集做平均。
P25
Theorem: Losses are equivalent if \(D\) is a Bregman divergence.
更进一步,使用任意的 Bregman Divergence Loss \((D(\cdot ,\cdot ))\) 散度代替 \(L2(||\cdot ,\cdot ||^2)\),都能得到相同结论,L2 Loss 只是其中一种。
P26

因为要学习的是一个“期望”。
P27
How to choose \(ψ_t(x|x_1)\)?
Optimal Transport minimizes Kinetic Energy
在上文中,定义
$$ ψ _t(x|x_1)=tx_1+(1-t)x $$
这样定义,是基于“最小化动能”的考虑。
如果最小化动能,能让路径变得直,且速度恒定。
所以将 \(ψ _t(X_0|X_1)\) 定义为 \(X_0\) 和 \(X_1\) 连线上的一个点,其中 \(X_0\) 可以是空间中任意一点定义为 \(X\) 。
直接优化动能不容易,因为它不依赖于具体的条件。因此给它设定一个 Jensen bound,来限制边缘速度的动能。

Jensen bound 是具体的条件 \((X_0,X_1)\) 下的期望。
当 \(X_0\) 和 \(X_1\) 确定时,Jensen bound 可以被算出来,也可以(通过优化\(ψ _t\))被最小化。
结论: 当 \(ψ _t(x|x_1)\) 定义为 \(tX_1+(1-t)X\) 时,Jensen bound 被最小化,此时 \(X_0\) 到 \(X_1\) 是直线。
Linear conditional flow总结:
• Minimizes bound,而不是直接优化动能。
• Reduces Kinetic Energy of initial coupling
把 \(ψ _t\) 代入 Jensen bound 公式可得出此结论。
• Exact Optimal Transport for single data points
如果 \(Q\) 分布中只有一个 \(X_1\)。此时公式左右两边相等,是最优传输。
• Not Optimal Transport (but in high dim straighter)
如果 \(Q\) 分布里不止一个点,不是最优传输,\(X_0\) 到 \(X_1\) 也不是直线。
🔎 "Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow" Liu et al. (2022)
🔎 "On Kinetic Optimal Probability Paths for Generative Models" Shaul et al. (2023)
P29
好的最优传输,可以通过单个欧拉步骤采样。
$$ \frac{d}{dt} \Psi _t(x)=u_t(\Psi _t(x)) $$
$$ ℒ_{CFM}(θ) = \mathbb{E}D(u^θ_t (X_t),u_t(X_t|X_1)) $$
D 是一个 Bregman 散度,L2 Loss 是其中一种,根据上文中 \(ψ _t\) 的定义,把L2 和条件速度代入公式得:对于特定的 \(X_0\) 和 \(X_1\) , \(X_1-X_0\) 是条件路径的条件速度。
$$ ℒ_{CFM}(θ) = \mathbb{E}||u^θ_t (X_t)-(X_1-X_0)||^ 2 $$
因此,这个算法是特定条件流 + 特定 Loss 下的一个 flow matching 实例。
P30
Affine paths
在前面的方法中,\(ψ_t(x|x_1)\) 是 \(x\) 与 \(x_1\) 的线性组合,这只是一种选择。现在假设其为仿射组合。

这种情况下,\(X_0\) 到 \(X_1\) 不再是直线。
由此得到不同的参数化速度的方式,例如:
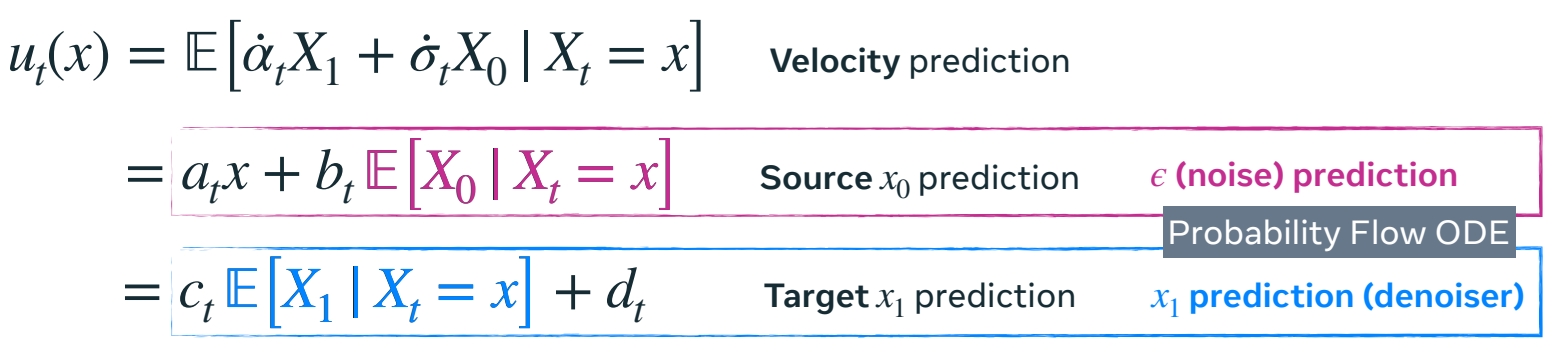
(1) \(u_t(x)=\frac{d\psi t}{dt}\) ,直接预测速度

(2) 源预测:通过 \(X_0\) 的条件期望来参数化速度。预测 \(X_0\) ,再转化为 \(x\) 的速度

(3) 目标预测类似,预测 \(X_1\) ,再转化为 \(x\)的速度

根据 \(\alpha _t\) 和 \(\sigma _t\) 的定义不同,推导出的 \(a_t,b_t,c_t,d_t\) 不同。
以上公式中的“期望”部分,都是网络要预测的部分。预测的内容不同,最终目的都是为了求 \(x\) 的速度。
P31
Gaussian paths
目前为止,没有对源分布 \(P\) 和目标分布 \(Q\) 做任何假设。
如果假设 \(P\) 是一个高斯分布,\(P\) 和 \(Q\) 是独立的,这个过程即与 diffusion 的 ODE 过程吻合。
$$ p(x) = 𝒩(x |0 , I) \quad π_{0,1}(x_0, x_1) = p(x_0)q(x_1) $$
diffusion 的噪声预测,在 \(x\) 接近噪声时(初始 steps)会有奇异性问题。
P32
Affine and Gaussian paths
参数比较
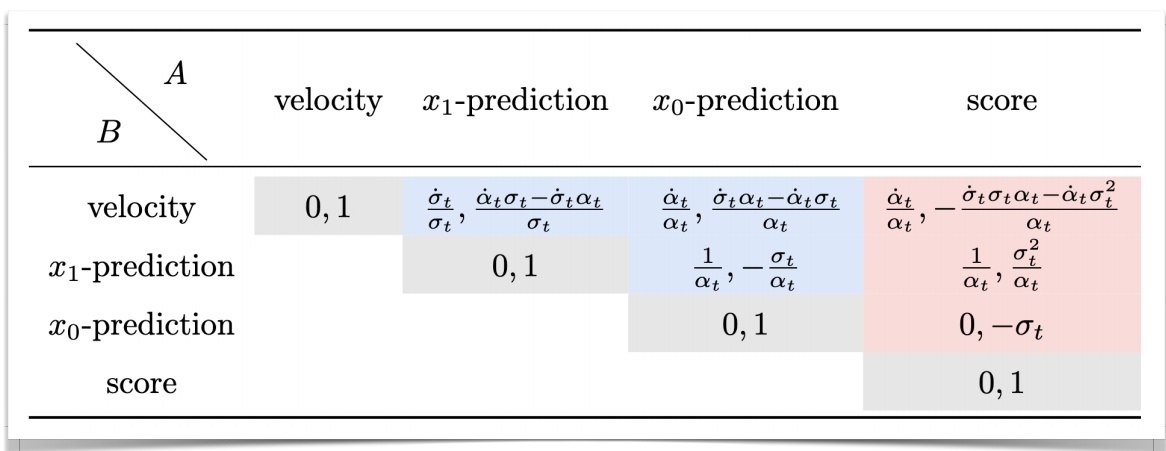
蓝色部分适用于所有的仿射路径(包括高斯 path)。粉色部分仅适用于高斯 path.
[❓] 表格怎么看?
P33

flow matching 与确定性 diffusion 之间的关系:
1.diffusion 通过定义 forward process 然后再反转来生成概率路径。
flow matching 通过将所有已知的条件概率路径的聚合来生成概率路径。
2.diffusion 构造了 forward prossess,需要一个根据 forward process 构造条件概率的闭式解,因此会要求 \(P\) 是高斯,且 \(P\) 和 \(Q\) 独立。
flow matching 没有这样的限制,\(P\) 和 \(Q\) 可以是任意的分布。
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/ImportantArticles/