仿真流程总结
✅ 本章定位:串联整个物理仿真章节,展示完整的仿真 Pipeline。
💡 前置知识:关于角色的分段刚体表示,见 RigidBodyRepresentation.md
完整仿真 Pipeline

✅ 角色仿真的完整流程:
- 计算当前状态 - 位置、速度、约束信息
- 计算外力 - 重力、风力、关节力矩(由控制器生成)
- 检测约束 - 关节约束、接触约束
- 求解约束力 - 解出 \(\lambda\),计算 \(J^T\lambda\)
- 积分更新状态 - 更新位置、速度
仿真方程
分段多刚体系统(详见 RigidBodyRepresentation.md):
$$ M\dot{v} + C(x,v) = f + J^T\lambda $$
| 项 | 含义 | 对应章节 |
|---|---|---|
| \(M\dot{v} + C(x,v)\) | 惯性力 | RigidBodyRepresentation.md |
| \(f\) | 外力 | 重力、风力、关节力矩 |
| \(J^T\lambda\) | 约束力 | Constraints.md / JointConstraint.md / Contacts.md |
仿真流程详解
步骤 1:计算外力
✅ 外力包括:
- 重力:\(mg\)
- 风力等其他外力
- 关节力矩:由控制器(如 PD 控制)生成
步骤 2:约束求解
关节约束(详见 JointConstraint.md):
- 防止刚体分离
- 求解 \(J^T\lambda\)
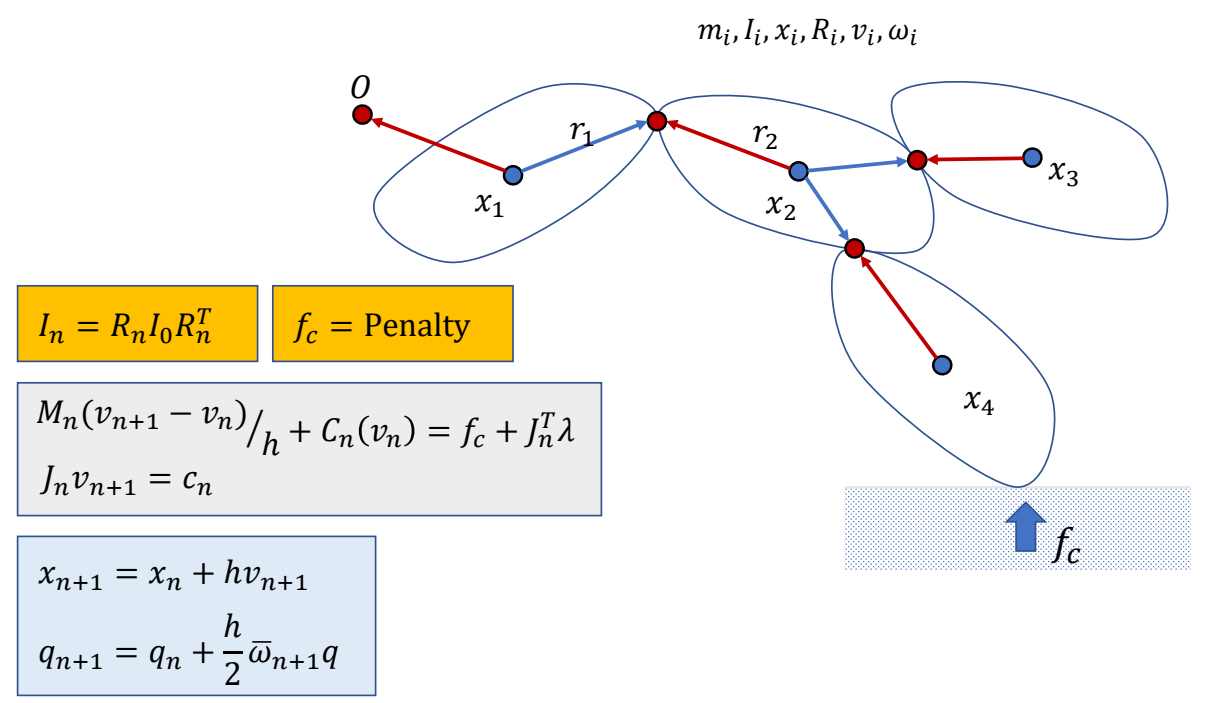
接触约束(详见 Contacts.md):
- 防止穿透地面
- 摩擦力防止滑动
步骤 3:积分更新
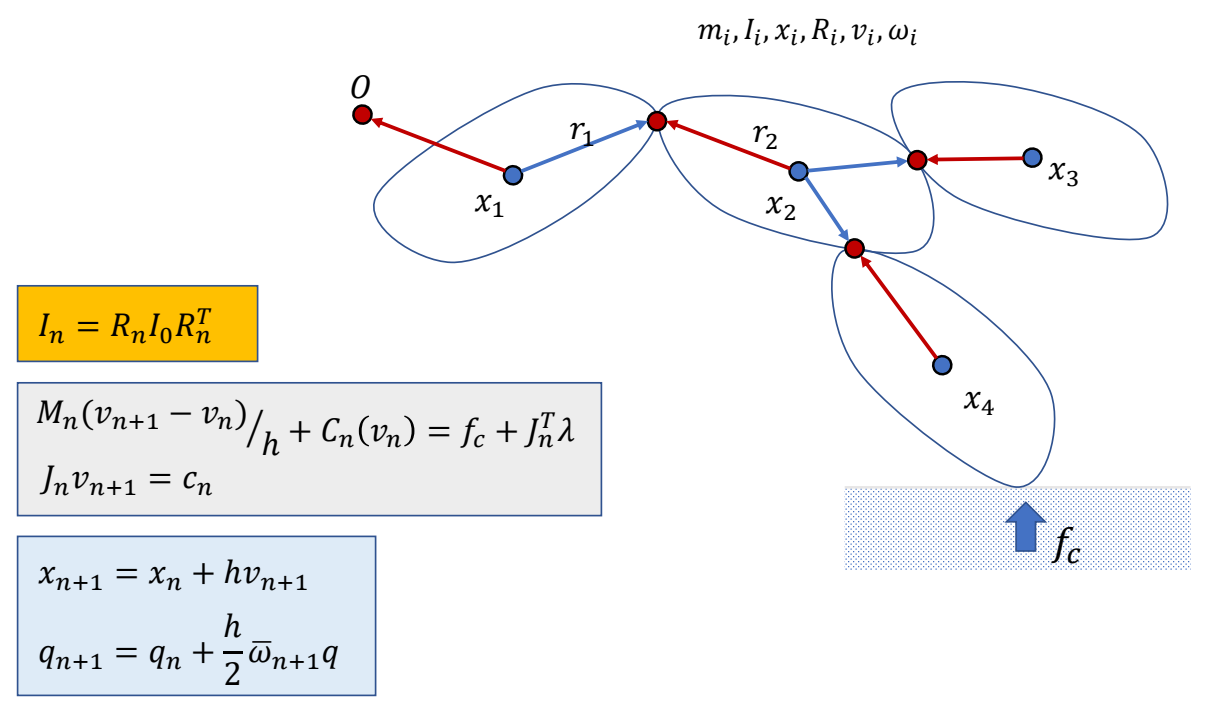
✅ 把人简化为分段刚体。整体过程为:
- (1) 黄:计算当前状态
- (2) 绿:计算约束,求解,解出下一时刻的速度
- (3) 蓝:更新下一时刻的量(积分)
本章小结
| 章节 | 内容 |
|---|---|
| Simulation.md | 仿真器概述、力与力矩、前向/后向动力学 |
| RigidBodyRepresentation.md | 角色的分段刚体表示 |
| Constraints.md | 约束求解原理(小球例子) |
| JointConstraint.md | 关节约束与关节力矩 |
| Contacts.md | 接触模型 |
| 本文 | 完整仿真流程总结 |
核心公式: $$ M\dot{v} + C(x,v) = f + J^T\lambda $$
本文出自 CaterpillarStudyGroup,转载请注明出处。 https://caterpillarstudygroup.github.io/GAMES105_mdbook/