关节约束
💡 前置知识:关于角色的分段刚体表示,见 RigidBodyRepresentation.md
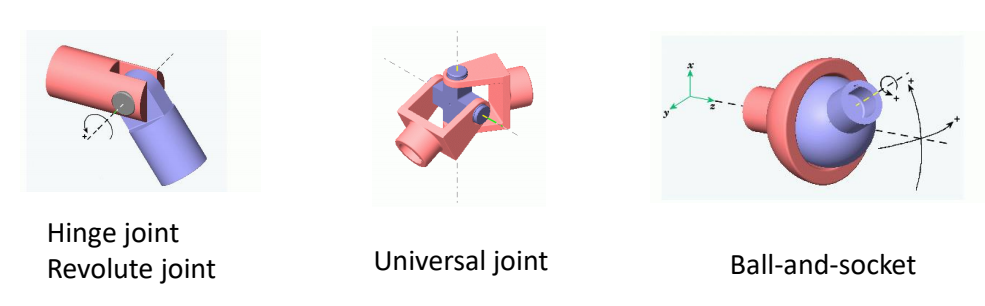
关节类型与约束方程
| 关节类型 | 约束自由度 | 位置约束 | 角速度约束 |
|---|---|---|---|
| Ball Joint(球铰) | 3 个平移 | ✅ | ❌ |
| Hinge Joint(铰链) | 3 个平移 + 2 个旋转 | ✅ | ✅ |
| Universal Joint(万向节) | 3 个平移 + 1 个旋转 | ✅ | ✅ |
| Fixed Joint(固定) | 3 个平移 + 3 个旋转 | ✅ | ✅ |
Ball Joint(球铰)
✅ Ball Joint 只约束位置,允许三个方向的自由旋转。
约束方程
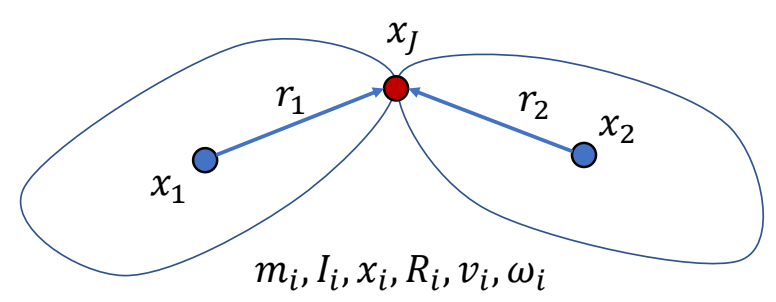
位置级约束: $$ x_1 + R_1 r_1 = x_2 + R_2 r_2 $$
速度级约束(对时间求导): $$ v_1 + \omega_1 \times r_1 = v_2 + \omega_2 \times r_2 $$
矩阵形式: $$ J = \begin{bmatrix} I_3 & -[r_1]\times & -I_3 & [r_2]\times \end{bmatrix} $$
$$ \begin{bmatrix} I_3 & -[r_1]\times & -I_3 & [r_2]\times \end{bmatrix} \begin{bmatrix} v_1 \\ \omega_1 \\ v_2 \\ \omega_2 \end{bmatrix} = 0 $$
简化为: $$ Jv = 0 $$
其中 \(J\) 是 \(3 \times 12\) 矩阵。
Hinge Joint(铰链)
✅ Hinge Joint 约束位置 + 2 个旋转自由度,只允许绕铰链轴旋转。
约束方程
位置级约束(同 Ball Joint): $$ x_1 + R_1 r_1 = x_2 + R_2 r_2 $$
角速度约束(额外约束): $$ \omega_1 \cdot a_1 = \omega_2 \cdot a_2 $$
其中 \(a_1, a_2\) 是两个刚体上的铰链轴方向向量。
矩阵形式: $$ Jv = \begin{bmatrix} J_{\text{pos}} \\ J_{\text{ang}} \end{bmatrix} v = 0 $$
其中:
- \(J_{\text{pos}}\) 是 \(3 \times 12\) 的位置约束矩阵(同 Ball Joint): $$ J_{\text{pos}} = \begin{bmatrix} I_3 & -[r_1]\times & -I_3 & [r_2]\times \end{bmatrix} $$
- \(J_{\text{ang}}\) 是 \(2 \times 12\) 的角速度约束矩阵,约束两个刚体在垂直于铰链轴方向上的角速度分量相等: $$ J_{\text{ang}} = \begin{bmatrix} 0_3 & a_{1\perp 1}^T & 0_3 & -a_{2\perp 1}^T \\ 0_3 & a_{1\perp 2}^T & 0_3 & -a_{2\perp 2}^T \end{bmatrix} $$ 其中 \(a_{\perp 1}, a_{\perp 2}\) 是两个垂直于铰链轴的方向。
完整 $J$ 矩阵是 \(5 \times 12\): $$ J = \begin{bmatrix} I_3 & -[r_1]\times & -I_3 & [r_2]\times \\ 0_3 & a_{1\perp 1}^T & 0_3 & -a_{2\perp 1}^T \\ 0_3 & a_{1\perp 2}^T & 0_3 & -a_{2\perp 2}^T \end{bmatrix} $$
Universal Joint(万向节)
✅ Universal Joint 约束位置 + 1 个旋转自由度,允许两个旋转自由度。
约束方程
位置级约束(同 Ball Joint): $$ x_1 + R_1 r_1 = x_2 + R_2 r_2 $$
角速度约束(额外约束): $$ \omega_1 \cdot a_1 = \omega_2 \cdot a_2 $$ $$ \omega_1 \cdot b_1 = \omega_2 \cdot b_2 $$
其中 \(a, b\) 是两个相互垂直的轴向,分别位于两个刚体上。
矩阵形式: $$ Jv = \begin{bmatrix} J_{\text{pos}} \\ J_{\text{ang}} \end{bmatrix} v = 0 $$
其中:
- \(J_{\text{pos}}\) 是 \(3 \times 12\) 的位置约束矩阵(同 Ball Joint)
- \(J_{\text{ang}}\) 是 \(1 \times 12\) 的角速度约束矩阵,约束两个刚体在万向节轴向上的角速度分量相等: $$ J_{\text{ang}} = \begin{bmatrix} 0_3 & a_1^T & 0_3 & -a_2^T \end{bmatrix} $$
完整 $J$ 矩阵是 \(4 \times 12\): $$ J = \begin{bmatrix} I_3 & -[r_1]\times & -I_3 & [r_2]\times \\ 0_3 & a_1^T & 0_3 & -a_2^T \end{bmatrix} $$
Fixed Joint(固定)
✅ Fixed Joint 完全固定两个刚体,不允许任何相对运动。
约束方程
位置级约束(同 Ball Joint): $$ x_1 + R_1 r_1 = x_2 + R_2 r_2 $$
角速度约束(全部约束): $$ \omega_1 = \omega_2 $$
矩阵形式: $$ Jv = \begin{bmatrix} J_{\text{pos}} \\ J_{\text{ang}} \end{bmatrix} v = 0 $$
其中:
- \(J_{\text{pos}}\) 是 \(3 \times 12\) 的位置约束矩阵(同 Ball Joint)
- \(J_{\text{ang}}\) 是 \(3 \times 12\) 的角速度约束矩阵,约束两个刚体的角速度完全相同: $$ J_{\text{ang}} = \begin{bmatrix} 0_3 & I_3 & 0_3 & -I_3 \end{bmatrix} $$
完整 $J$ 矩阵是 \(6 \times 12\): $$ J = \begin{bmatrix} I_3 & -[r_1]\times & -I_3 & [r_2]\times \\ 0_3 & I_3 & 0_3 & -I_3 \end{bmatrix} $$
运动方程 + 约束方程
无论哪种关节,都可以统一写成:
$$ \begin{align*} M\dot{v} + C(x,v) &= f + J^T\lambda \\ Jv &= 0 \end{align*} $$
| 符号 | 含义 |
|---|---|
| \(M\) | \(6n \times 6n\) 质量矩阵 |
| \(C(x,v)\) | 科氏力 + 离心力 |
| \(f\) | 外力(重力、风力、关节力矩) |
| \(J\) | 约束雅克比矩阵(\(m \times 6n\)) |
| \(\lambda\) | 拉格朗日乘子(约束力大小) |
✅ 联立方程组可以解出约束力 \(\lambda\) 和下一时刻的速度。
约束求解的详细推导:见 Constraints.md(小球例子)
统一约束求解框架
✅ 核心洞察:不同约束的求解公式完全一样,唯一的区别是雅克比矩阵 \(J\) 的构造。
不同关节的 \(J\) 矩阵对比
| 关节类型 | \(J\) 的行数 | 说明 |
|---|---|---|
| Ball Joint | 3 行 | 仅位置约束 |
| Hinge Joint | 5 行 | 3 行位置约束 + 2 行角速度约束 |
| Universal Joint | 4 行 | 3 行位置约束 + 1 行角速度约束 |
| Fixed Joint | 6 行 | 3 行位置约束 + 3 行角速度约束 |
统一求解流程
无论哪种关节,都遵循相同的求解步骤:
- 计算预测速度:\(v^* = v_n + h M^{-1}f\)
- 构建约束雅可比 \(J\)(根据关节类型)
- 求解拉格朗日乘子: $$ \lambda = (J M^{-1}J^T + \beta I)^{-1}(b - Jv^*) $$
- 计算约束力:\(f_c = J^T\lambda\)
- 更新速度:\(v_{n+1} = v^* + h M^{-1}J^T\lambda\)
✅ 物理引擎实现的关键:
- 为每种关节类型实现一个 \(J\) 矩阵构造函数
- 把所有约束的 \(J\) 行堆叠起来形成总约束矩阵
- 代入统一公式求解 \(\lambda\)
✅ 多约束同时处理:当系统有多个约束时(如多个关节 + 接触),只需将每个约束的 \(J\) 矩阵按行堆叠,公式形式不变,只是矩阵维度更大。
多个刚体与多个约束
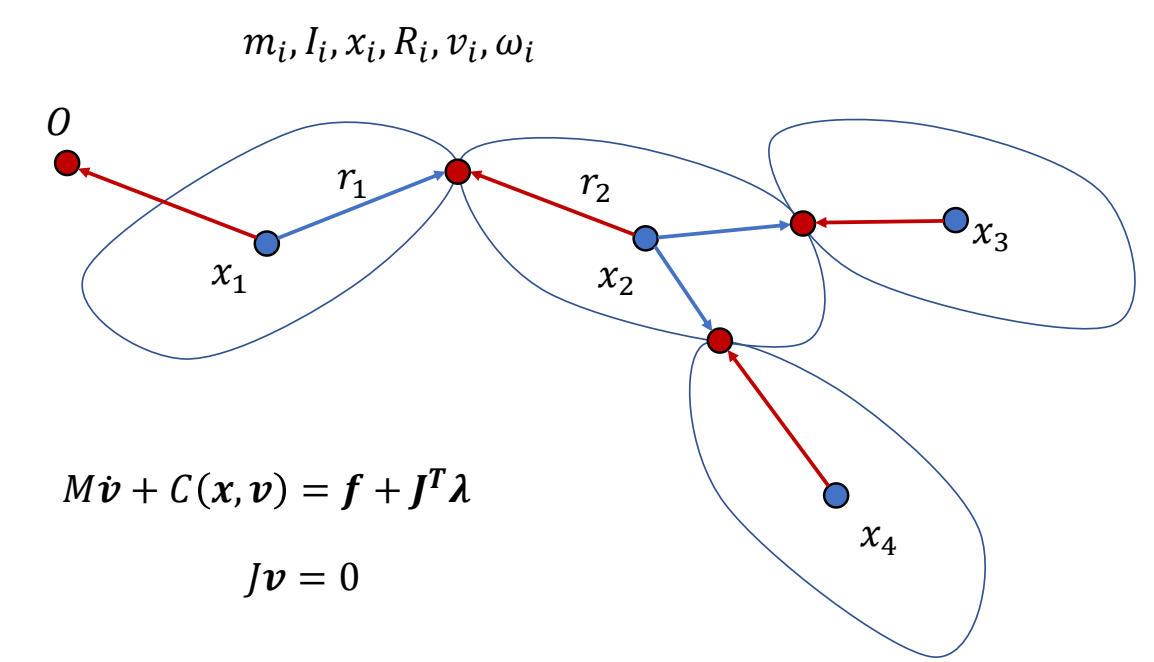
✅ 分段多刚体系统:公式形式相同,只是矩阵维度更大。
对于 \(n\) 个刚体、\(m\) 个约束的系统:
- \(M\) 是 \(6n \times 6n\) 的分块对角矩阵
- \(J\) 是 \(m \times 6n\) 的矩阵(每个约束贡献若干行)
关节力矩
关节力矩的详细介绍:见 JointTorques.md
✅ 关节力矩是主动控制力矩,用于驱动角色运动。在运动方程中: $$ M\dot{v} + C(x,v) = f_{\text{ext}} + f_{\text{joint}} + J^T\lambda $$ 其中 \(f_{\text{joint}}\) 是关节力矩(主动),\(J^T\lambda\) 是约束力(被动)。
本文出自 CaterpillarStudyGroup,转载请注明出处。 https://caterpillarstudygroup.github.io/GAMES105_mdbook/