Constraints 简化问题分析
💡 为什么先学小球? 接下来要介绍关节约束的求解。在讲解角色的关节约束之前,先用小球的简单例子来理解约束求解的核心思想。 小球约束与关节约束的数学形式完全相同,只是场景更简单、更容易理解。
问题描述
✅ 假设有一约束:小球必须按轨道行进。

小球速度分析
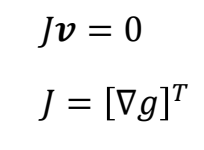
✅ 根据已知条件,可以进行以下分析:由于每一时刻都满足,对时间求导,导数为零。

其中第一项为 \(g(x)\) 的雅克比矩阵,记作 \(J\) 或 \([\nabla g]^{T}\), 第二项为 \(x\) 的速度。 因此得到约束为:如果要求小球按照轨道运行,其速度必须满足以下公式。
小球的约束力分析
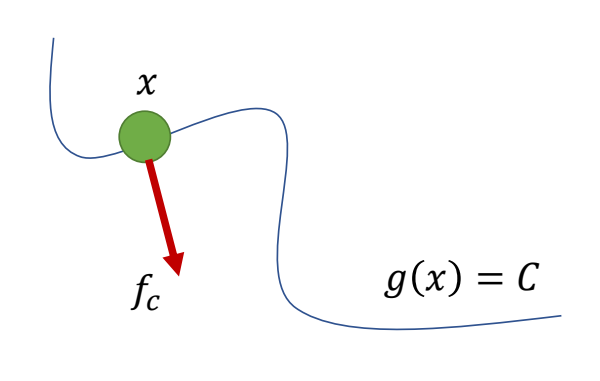
✅ 为了让小球满足约束,需给小球一个约束力。
\(^\ast \) Constraint is passive No energy gain or loss!!!
$$ f_c\cdot v=0 $$
✅ 约束力不应产生能量,即力与运动方向垂直。
✅ \(J\) 本是一个矩阵,但在这个场景中 \(C\) 是常数,所以 \(J\) 是向量。 ✅ 结合是一页的结论可知:\(f_c\) 与 \(J\) 同方向,但大小未知。\(\lambda \)代表一个未知的 scale。 ✅ \(f_c\) 大小以当前状态和外力情况计算而得。
小球的整体受力分析
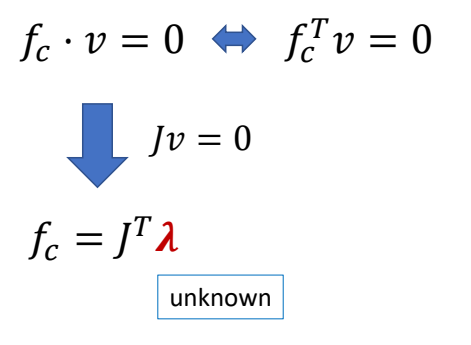
✅ 对小球做受力分析,受到外力 \(f\) 和约束力 \(f_c\). ✅ 假设 \(M,x,v.f\) 已知,求 \(f_c\) ,使得小球沿轨迹移动。

$$ \begin{align*} M\dot{v} & =f+J^T\lambda \\ Jv&=0 \end{align*} $$
✅ 公式 1:\(f=am\).公式 2:前面推导得出。把两个公式离散化。 ✅ 假设当前时刻已满足 \(J_n v_n = 0\),所以只约束下一时刻。
$$ \begin{align*} M\frac{v_{n+1}-v_n}{h} & =f+J^T\lambda \\ Jv_{n+1}&=0 \end{align*} $$
✅ 得出未知数为\(\lambda\)和\(v_{n+1}\)的联立方程组,求解方程组。 ✅ 因为公式 2 只约束了速度没有约束位置。离散化后对原公式只是近似,会有误差,导到小球远离曲线。 ✅ 解方程组不难,但存在小球偏离轨道的问题。
✅ 当物体偏离轨道,要把它拉回来。因此公式 2 改为:
$$ Jv_{n+1}=\alpha \frac{C-g(x_n)}{h} $$
等式右边的非零项称为 Correction of numerical errors。 𝛼: error reduction parameter (ERP)
方程组求解
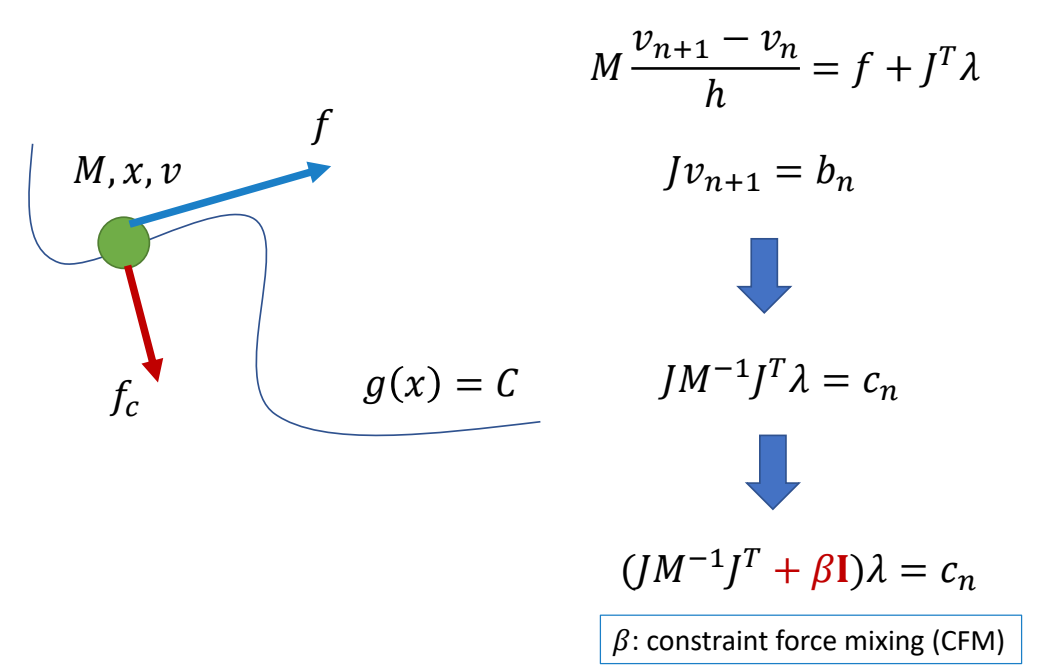
✅ 把校正项简写为 \(b\). \( n \) 时刻发现的误差由 \( n+1 \) 时刻来校正。 ✅ 为了防止矩阵不可逆,增加 \(\beta I\).(常见技巧) ✅ 解 \(\lambda\) 需要先求逆。
附录:公式推导过程
目标:求解拉格朗日乘子 \(\lambda\)
已知方程组(带误差校正):
$$ \begin{cases} \displaystyle M\frac{v_{n+1}-v_n}{h} = f + J^T\lambda \\ Jv_{n+1} = b \end{cases} $$
其中 \(b = \alpha\frac{C-g(x_n)}{h}\) 是误差校正项。
步骤 1:从运动方程解出 \(v_{n+1}\)
$$ M\frac{v_{n+1}-v_n}{h} = f + J^T\lambda $$
$$ v_{n+1}-v_n = h M^{-1}(f + J^T\lambda) $$
$$ v_{n+1} = v_n + h M^{-1}f + h M^{-1}J^T\lambda $$
令 \(v^* = v_n + h M^{-1}f\)(不含约束力的预测速度)
则: $$ v_{n+1} = v^* + h M^{-1}J^T\lambda $$
步骤 2:代入约束方程
约束方程: $$ Jv_{n+1} = b $$
代入 \(v_{n+1}\): $$ J(v^* + h M^{-1}J^T\lambda) = b $$
展开: $$ Jv^* + h J M^{-1}J^T\lambda = b $$
步骤 3:解出 \(\lambda\)
$$ h J M^{-1}J^T\lambda = b - Jv^* $$
$$ \lambda = (h J M^{-1}J^T)^{-1}(b - Jv^*) $$
步骤 4:防止矩阵不可逆
\(J M^{-1}J^T\) 可能不可逆(例如约束冗余时),添加正则化项 \(\beta I\):
$$ \lambda = (J M^{-1}J^T + \beta I)^{-1}(b - Jv^*) $$
最终公式
$$ \boxed{\lambda = (J M^{-1}J^T + \beta I)^{-1}(b - Jv^*)} $$
| 符号 | 含义 |
|---|---|
| \(v^* = v_n + h M^{-1}f\) | 无约束时的预测速度 |
| \(b = \alpha\frac{C-g(x_n)}{h}\) | 误差校正项(ERP) |
| \(\beta I\) | 防止矩阵不可逆的正则化项 |
✅ 核心思想:把约束求解转化为求解拉格朗日乘子 \(\lambda\) 的线性方程组。
从小球到关节约束
小球例子的约束求解公式可以直接应用到关节约束。
| 概念 | 小球例子 | 关节约束 |
|---|---|---|
| 约束对象 | 小球位置 | 两个刚体的连接点 |
| 约束方程 | \(g(x) = 0\)(小球在轨道上) | \(x_1 + R_1r_1 = x_2 + R_2r_2\)(连接点重合) |
| 速度级约束 | \(Jv = 0\) | \(v_1 + \omega_1 \times r_1 = v_2 + \omega_2 \times r_2\) |
| 雅克比 J | 向量(\(1 \times 6\)) | 矩阵(\(3 \times 12\)) |
| 约束力 | \(J^T\lambda\)(轨道支持力) | \(J^T\lambda\)(关节力) |
| 物理意义 | 防止小球脱离轨道 | 防止刚体分离 |
关节约束的约束方程推导
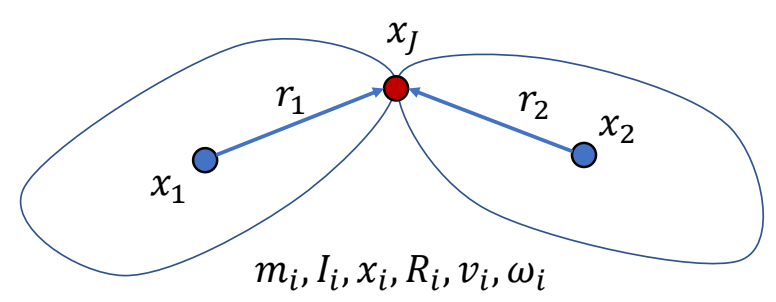
✅ 关节约束:两个刚体在关节处的位置必须相同。
位置级约束: $$ x_1 + R_1 r_1 = x_2 + R_2 r_2 $$
速度级约束(对时间求导): $$ v_1 + \omega_1 \times r_1 = v_2 + \omega_2 \times r_2 $$
矩阵形式: $$ \begin{bmatrix} I_3 & -[r_1]\times & -I_3 & [r_2]\times \end{bmatrix} \begin{bmatrix} v_1 \\ \omega_1 \\ v_2 \\ \omega_2 \end{bmatrix} = 0 $$
简化为: $$ Jv = 0 $$
✅ 数学形式完全相同:\(M\dot{v} + C = f + J^T\lambda\),\(Jv = b\) 只是 \(J\) 的具体形式不同(小球是向量,关节是矩阵)。
深入学习:JointConstraint.md - 关节约束详细推导(各种关节的 \(J\) 矩阵构造与统一求解框架)