P62
Static Balance
本章要解决的问题
核心问题:如何在静止站立的情况下,通过控制策略保证角色不摔倒?
问题分解
| 子问题 | 说明 |
|---|---|
| 什么是平衡? | 质心在支撑面内 |
| 为什么难? | 人形角色是欠驱动系统 |
| 如何检测不平衡? | 检查质心投影是否偏离支撑面中心 |
| 如何纠正? | 在关节上施加额外的力矩 |
与欠驱动系统的关系
欠驱动系统 → 无法直接控制质心 → 需要间接控制
↓
通过关节力矩控制质心位置
↓
在脚踝或髋关节施加额外力矩
两种控制策略
| 策略 | 方法 | 特点 |
|---|---|---|
| 简单 PD 控制 | 在脚踝/髋关节加额外力矩 | 简单直接,适用于静止站立 |
| Jacobian Transpose | 虚拟力 → 关节力矩转换 | 更灵活,可实现多种动作 |
✅ 深入学习:欠驱动系统问题 - 理解为什么质心无法直接控制
定义
What is balance?
✅ Static Balance:在不发生移动的情况下,通过简单的控制策略,保证角色不摔倒。 ✅ 平衡:质心在支撑面内。
P64
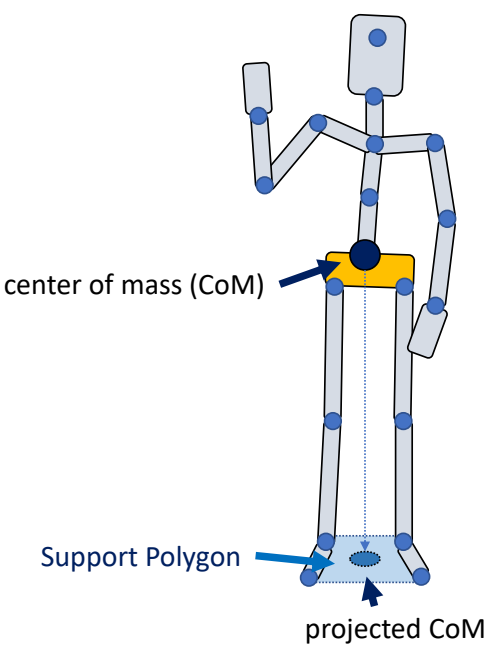
✅ 人的质心:每一段的质心的加权平均。
✅ 人的支撑面:两脚之内。
P66
A simple strategy: PD Control
A simple strategy to maintain balance:
根据条件计算力矩
-
Keep projected CoM close to the center of support polygon while tracking a standing pose
-
Use PD control to compute feedback torque
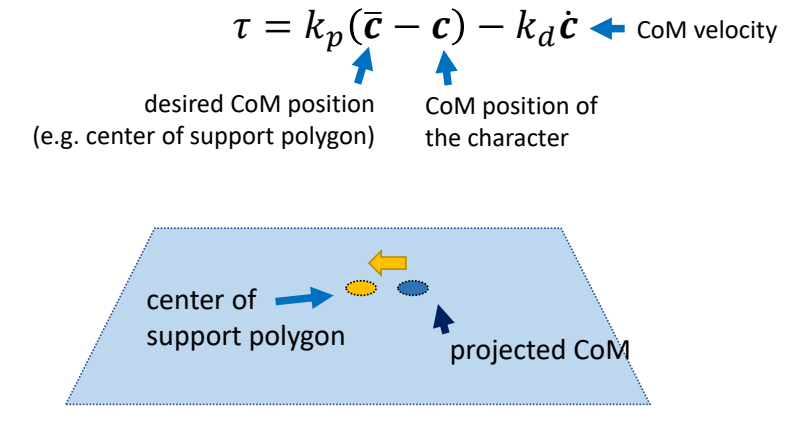
✅ 力矩 1:让角色保持某个姿势。
✅ 力矩 2:让质心与目标质心位置接近。力矩额外加在脚裸关节或髋关节上。
✅ 在某些关节上增加一些额外的力矩。
P68
施加力矩
- Apply the feedback torque at ankles (ankle strategy) or hips (hip strategy)
P69
Jacobian Transpose Control
✅ 实现 static balance,除了 PD 控制还有其它方法。
计算要施加的力
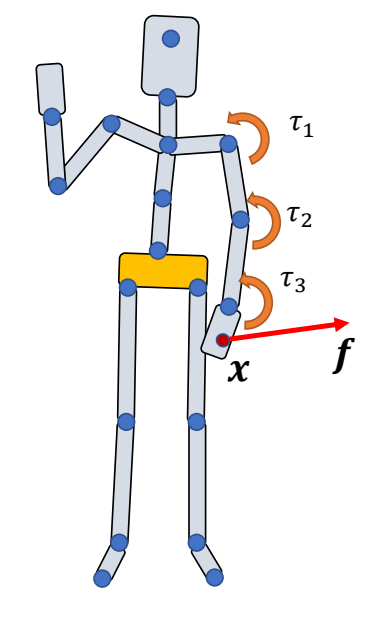
Can we use joint torques \(\tau _i\) to mimic the effect of a force \(f\) applied at \(x\)
- Note that the desired force \(f\) is not actually applied
- Also called “virtual force”
✅ 通过施加 \(\tau _1 ,\tau _2,\tau _3\) 来达到给 \(x\) 施加 \(f\) 的效果!
P73
把力转化为力矩
Make \(f\) and \(\tau _i\) done the same power
$$ P=f^T\dot{x}=\tau ^T\dot{\theta } $$
✅ 从做功的角度。力矩所做的功(功率)与虚力要做的功(功率)相同。功率 = \(fv\)
Forward kinematics \(x=g(\dot{\theta } )\Rightarrow \dot{x}=J \dot{\theta } \)
✅ \(g(* )\) 是一个FK函数。其中:
$$ J=\frac{\partial g}{\partial \theta } $$
✅ 把 \( \dot{x } \) 代入上面公式得
$$ f^T J\dot{\theta } = \tau ^T\dot{\theta } $$
$$ \Downarrow $$
P76
$$ \tau =J^Tf $$
✅ 把 \( \tau\) 分解为每一个关节每一个旋转的 \( \tau\).通过 Jacobian 矩阵的含义推出:
$$ \Downarrow $$
$$ \tau _i=(x-p_i)\times f $$
P77
用于Static Balance
A simple strategy to maintain balance:
-
Keep projected CoM close to the center of support polygon while tracking a standing pose
-
Use PD control to compute feedback virtual force
✅ P66 中在 Hips 上加力矩的方式只能进行简单的控制。
✅ 可以通过虚力实现相似的效果。用 \(PD\) 控制计算出力,再通过关节力矩实现这个力。
$$ f=k_p(\bar{c} -c)-k_d\dot{c} $$
✅ \(c\) 不一定是投影距离,还可以描述高度距离,实现站起蹲下的效果。
P78
- Assuming \(f\) is applied to the CoM, compute necessary joint torques using Jacobian transpose control to achieve it
✅ 但也不是真的加力,而是通过前面讲的 Jacobian transpose control 方法转为特定关节的力矩。
- Usually using the joints in the legs
✅ 最后达到在Hips上加力的效果
✅ 但这种方式能施加的力非常弱,只能实现比较微弱的平衡
P79
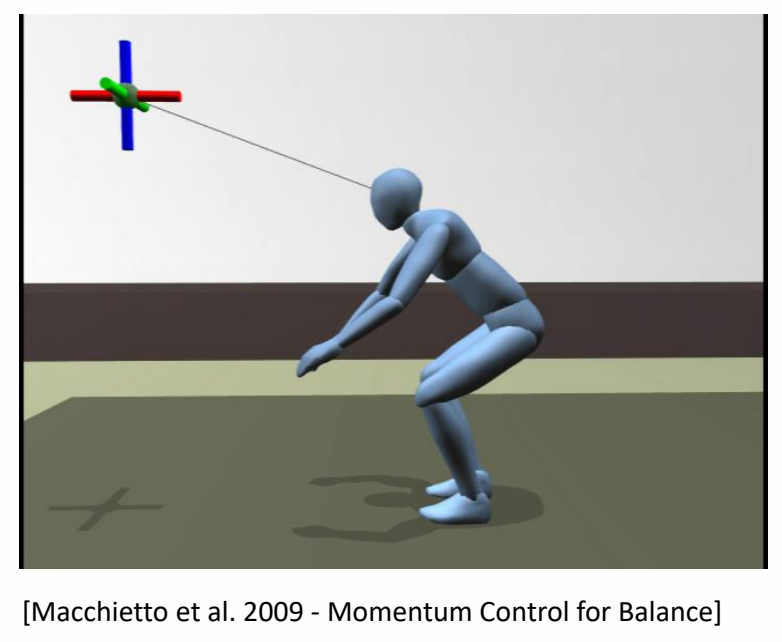
A fancier strategy:
- Mocap tracking as an objective function
- Controlling both the CoM position/momentum and the angular momentum
- Solve a one-step optimization problem to compute joint torques
🔎
本文出自 CaterpillarStudyGroup,转载请注明出处。 https://caterpillarstudygroup.github.io/GAMES105_mdbook/