Contacts
✔ 如何处理与地面的接触,让人站在地面上。
✔ 要解决的问题:
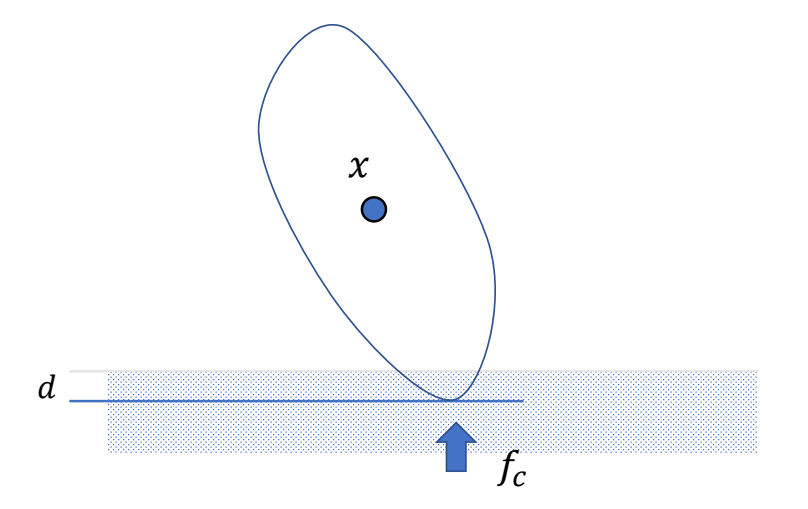
- 地面接触检测:检测哪些点/面与地面接触
- 接触力施加:如何对碰撞点施加力,使物体不陷入地面
💡 与 GAMES103 的分工
- GAMES103 - 碰撞检测与响应:详细介绍碰撞检测算法(Broad Phase、Narrow Phase、GJK、CCD)和穿透解除方法(内点法、Impact Zone)
- GAMES105 - 接触约束求解:focus 在如何将接触建模为约束,并与关节约束统一求解
深入学习:
方法一:Penalty-based Contact Model(基于惩罚的接触模型)
基本思想
用弹簧 - 阻尼模型近似接触力:当物体穿透地面时,产生一个与穿透深度成正比的斥力。
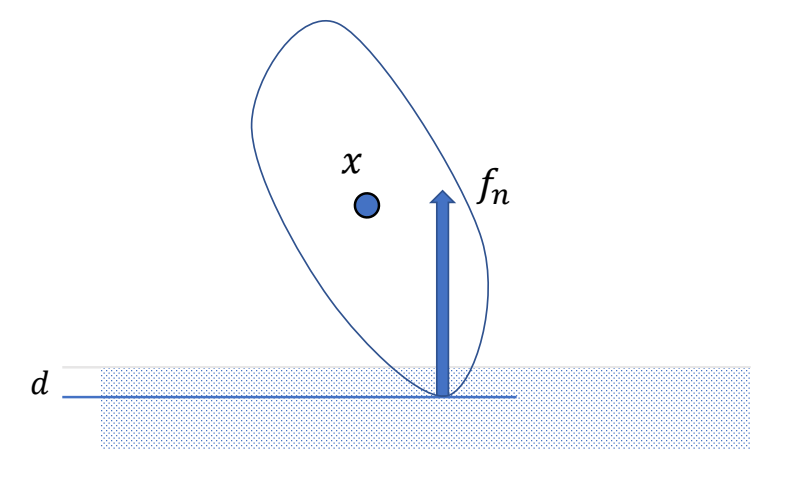
$$ f_n = -k_p d - k_d v_{c,\perp} $$
| 参数 | 含义 |
|---|---|
| $d$ | 穿透深度($d > 0$ 时公式生效) |
| $k_p$ | 弹簧刚度(越大越不容易穿透) |
| $k_d$ | 阻尼系数(防止反弹) |
| $v_{c,\perp}$ | 接触点法向速度 |
✔ 效果:会有一些陷入,但不会陷入太多 ❐ 支持力竟然不是 $-mg$,而是由弹簧模型决定
考虑摩擦力
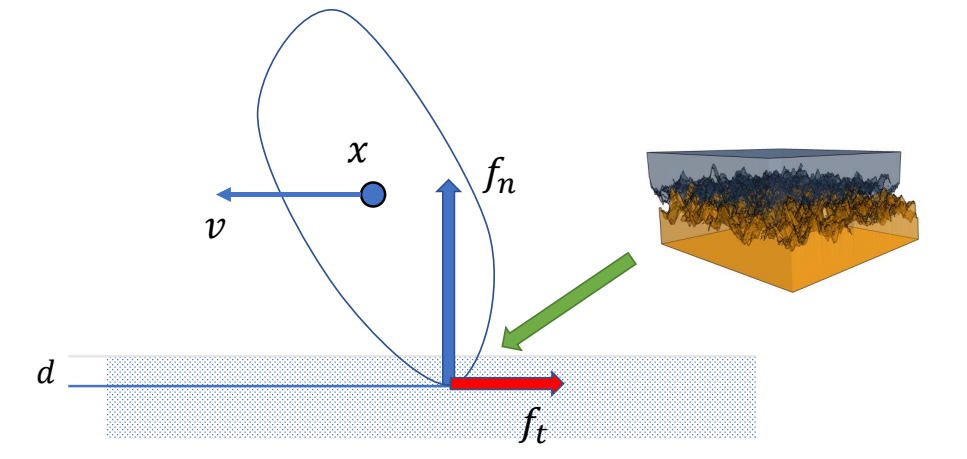
动摩擦力模型: $$ f_t = -\mu f_n \frac{v_{c,\parallel}}{||v_{c,\parallel}||} $$
| 参数 | 含义 |
|---|---|
| $\mu$ | 摩擦系数 |
| $f_n$ | 法向支持力 |
| $v_{c,\parallel}$ | 接触点切向速度 |
✔ 一般不模拟静摩擦力
存在的问题
| 问题 | 原因 | 后果 |
|---|---|---|
| $k_p$ 必须很大 | 否则脚陷地明显 | 需要非常小的时间步长 |
| $k_d$ 必须非常大 | 否则地面像蹦床 | 数值不稳定 |
| 时间步长必须小 | 高增益导致刚度大 | 仿真效率低 |
💡 与 GAMES103 内点法的关系
GAMES103 中介绍的**内点法(Interior Point Methods)**使用了类似的惩罚思想,但用能量场定义斥力:
$$ E(\mathbf{x}) = -\rho \log ||\mathbf{x}_{ij}|| $$
$$ \mathbf{f} = -\nabla E = \rho \frac{\mathbf{x}{ij}}{||\mathbf{x}{ij}||^2} $$
两种方法本质相同:距离越近,斥力越大。GAMES105 使用简化的弹簧模型,更易于理解。
方法二:Contact as a Constraint(接触作为约束)
✔ 另一种方法,把接触建模为数学约束,与关节约束统一求解。
接触点状态分析
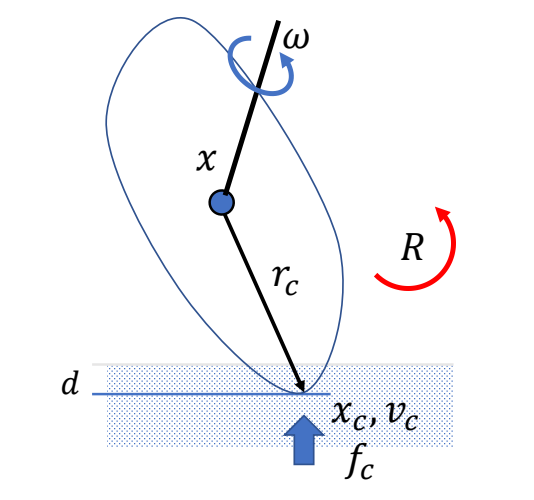
接触点 $x_c$ 的位置表示: $$ x_c = x + r_c $$
接触点 $x_c$ 的速度表示: $$ v_c = v + \omega \times r_c = J_c \begin{bmatrix} v \\ \omega \end{bmatrix} $$
接触点法向速度: $$ v_{c,\perp} = J_{c,\perp} \begin{bmatrix} v \\ \omega \end{bmatrix} $$
接触点约束分析

✔ 约束 1:点在竖直方向的速度必须 $\geq 0$,即只能向上移动(不能向下穿透)。
✔ 约束 2:力的大小 $\lambda > 0$,只能推,不能拉。$\lambda$ 是力与速度的大小比例系数。
✔ 约束 3:力和速度只能有一个不为零,否则会做功(互补条件)。
$$ v_c \perp \lambda = 0 $$
线性互补问题(LCP)
✔ 合在一起称为线性互补方程,是碰撞建模的标准方式。
这类问题被称为:(Mixed) Linear Complementary Problem (LCP)
解 LCP 的方法有:
- Lemke's algorithm – a simplex algorithm
- Projected Gauss-Seidel
- 其他数值优化方法
❐ 这个方程比较难解,计算成本高于 Penalty 方法
考虑摩擦力的约束问题
How to deal the friction?
🔍 推荐阅读:Fast contact force computation for nonpenetrating rigid bodies. David Baraff. SIGGRAPH '94
✔ 该论文提出了快速实现静摩擦约束的建模方法。
两种方法对比
| 特性 | Penalty-based | Constraint-based (LCP) |
|---|---|---|
| 原理 | 弹簧 - 阻尼模型近似 | 数学约束精确建模 |
| 穿透 | 允许少量穿透 | 无穿透 |
| 求解 | 直接计算力 | 需要专门求解器 |
| 计算成本 | 低 | 高 |
| 数值稳定性 | 需要小步长 | 较稳定 |
| 与关节约束统一 | 否 | ✅ 是 |
| 适用场景 | 实时应用、游戏 | 精确仿真、研究 |
在运动方程中的位置
对于有接触的角色系统,运动方程为:
$$ M\dot{v} + C(x,v) = f_{\text{ext}} + f_{\text{joint}} + J_{\text{contact}}^T \lambda_{\text{contact}} $$
$$ J_{\text{contact}} v \geq 0, \quad \lambda_{\text{contact}} \geq 0, \quad (J_{\text{contact}} v) \perp \lambda_{\text{contact}} $$
✔ 关键:接触约束与关节约束形式统一,可以同时求解!
本文出自 CaterpillarStudyGroup,转载请注明出处。 https://caterpillarstudygroup.github.io/GAMES105_mdbook/