P2
Outline
🔎 SIGGRAPH 经典的蒙皮课程。
Many images are from: https://skinning.org/
Alec Jacobson, Zhigang Deng, Ladislav Kavan, and J. P. Lewis. 2014.
Skinning: real-time shape deformation.
In ACM SIGGRAPH 2014 Courses (SIGGRAPH '14)
P7
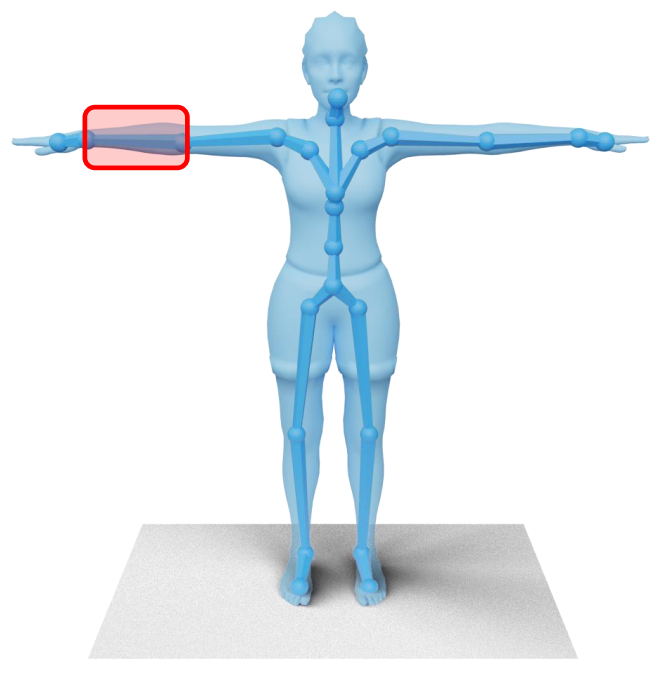
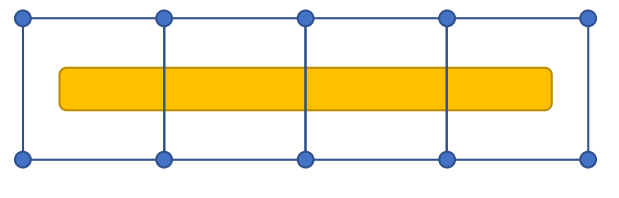
Skinning Deformation
绑定与蒙皮概念
✅ Rigging:创建脸部控制器或身体骨骼。黄色为在 Mesh 顶点内放置的骨骼。
✅ Sinning:让控制器带动皮肤运动。或让 Mesh 顶点跟着骨骼运动。
骨骼代理的角色驱动的局限性
- 非刚性形变:
- LBS(线性混合蒙皮)无法表达肌肉膨胀、软组织形变
- 解决方案:PartMM(Part-aware Mixture Model)替代LBS
- 高频细节丢失:
- 骨骼代理只能捕获低频运动(关节旋转)
- 解决方案:法线修正、位移残差学习
P12
Skinning Deformation
计算方式一

✅ 骨骼运动的旋转和平移分别为 \(R\) 和 \(t\),关节的位置和朝向则变成了 \({Q}'\) 和 \({o}'\).
✅ 求 \(x\) 的新位置 \({x}'\). 本质上就是坐标系变换:世界坐标系 → \({o}\) 坐标系 → \({o}'\) 坐标系 → 世界坐标系
P13
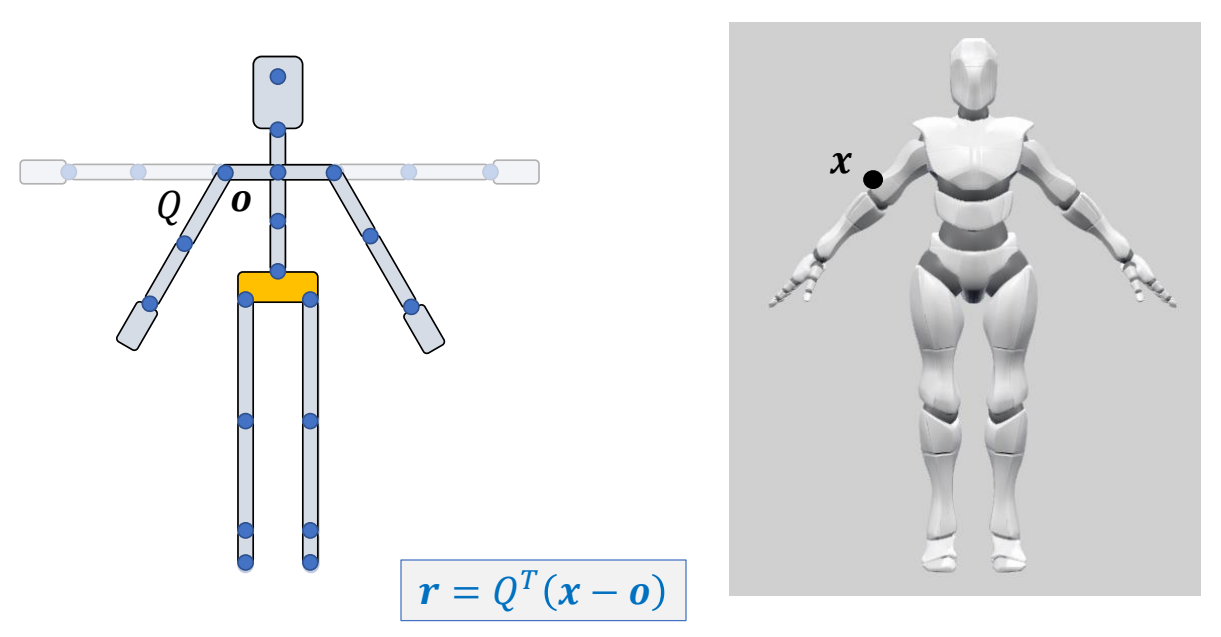
计算方式二
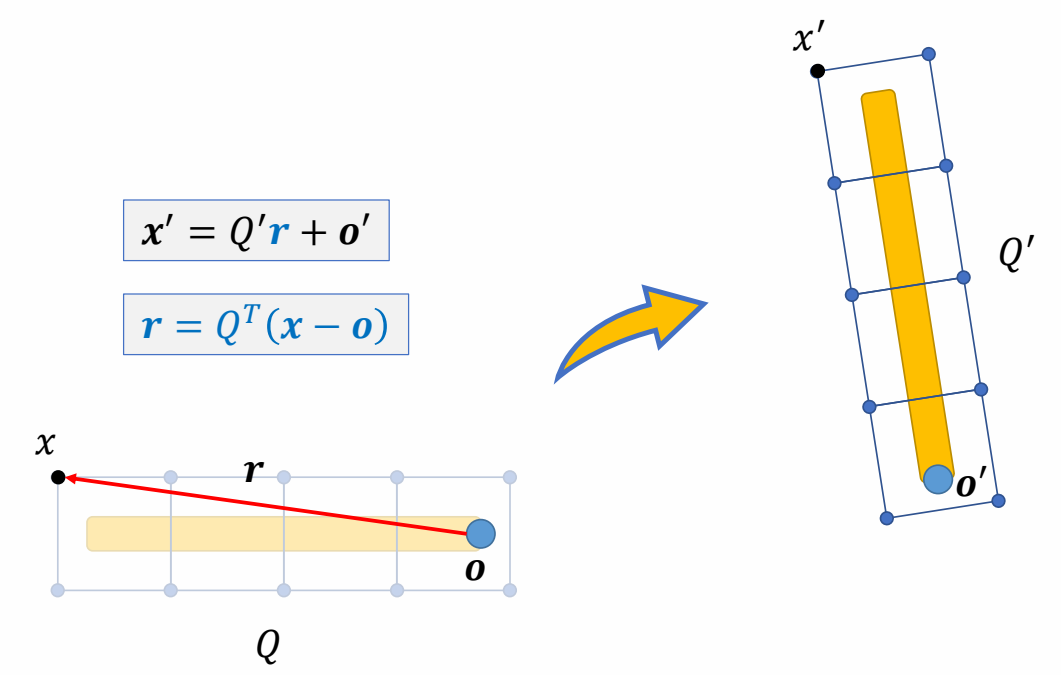
✅ \(r\) 为 \(x\) 在骨骼坐标的表达,用 \(r\) 计算更简洁。
P16
Bind Pose
✅ 当骨骼参考姿态与 Mesh 参考姿态不一致时,需要先旋转骨骼到 Mesh 姿态。
P20
Skinning Deformation - 2 joints
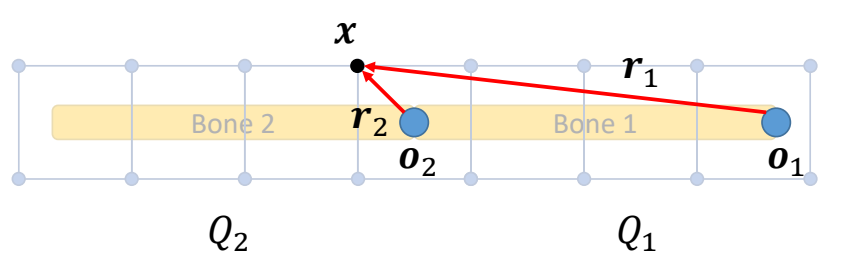
$$ r_2=Q^T_2(x-o_2) \quad \quad r_1=Q^T_1(x-o_1) $$
✅ 多骨骼场景,\(x\) 在关节 \(O_1\) 和 \(O_2\) 下分别 \(r_1\) 和 \(r_2\) 两种表达。
P23

✅ 得到的旋转后表达分别为 \({x}'_1\) 和 \({x}'_2\),通过权重对它们结合。
P29
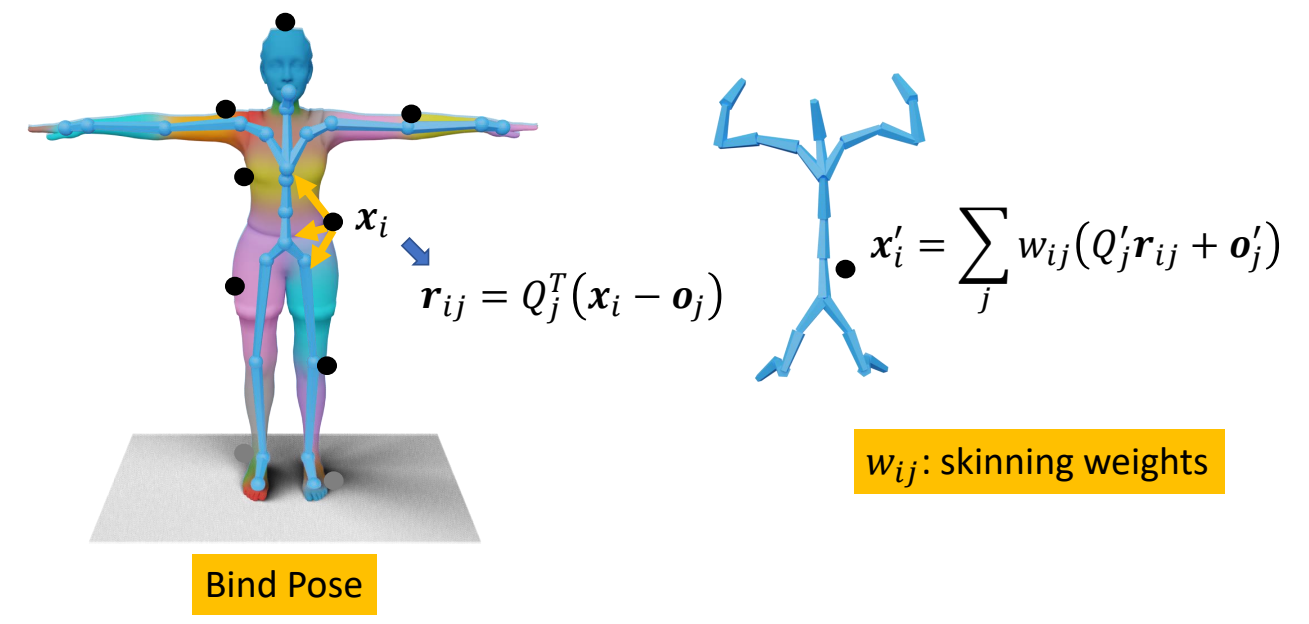
✅ 同时考虑所有 Mesh 顶点和所有关节。
补充:LBS 基础(
LBS 是最流行的角色蒙皮方法。它的核心公式:
$$ \mathbf{v} _{i} ^{t} = \sum _{j=1}^{|B|} w _{ij} \left( \mathbf{R} _{j} ^{t} \mathbf{p} _{i} + \mathbf{T} _{j} ^{t} \right) $$
| 符号 | 含义 | 通俗解释 |
|---|---|---|
| \(\mathbf{v} _{i} ^{t}\) | 第 \(t\) 个姿态中第 \(i\) 个顶点的位置 | 动画中某一帧的某个表面点 |
| \(\mathbf{p} _{i}\) | 静止姿态中第 \(i\) 个顶点的位置 | 角色摆好标准姿势时的那个点 |
| \(w _{ij}\) | 第 \(j\) 根骨头对第 \(i\) 个顶点的影响权重 | 这根骨头对这个点有多大的控制力 |
| \(\mathbf{R} _{j} ^{t}\) | 第 \(t\) 个姿态中第 \(j\) 根骨头的旋转矩阵 | 这根骨头转了多少 |
| \(\mathbf{T} _{j} ^{t}\) | 第 \(t\) 个姿态中第 \(j\) 根骨头的平移向量 | 这根骨头平移了多少 |
| \( | B | \) |
通俗理解:
想象你有一块橡皮泥(顶点),它被钉在几根棍子(骨头)上。
每根棍子上都有一个钉子,钉子对橡皮泥的拉力就是权重 w。
当棍子移动时,橡皮泥的位置 = 每根棍子拉力 × 棍子移动距离 的总和
LBS 权重的约束条件
为了让 LBS 模型有意义,权重 \(w _{ij}\) 需要满足三个条件:
-
非负性(Non-negativity):\(w _{ij} \geq 0\)
- 骨头不能"推"顶点,只能"拉"
-
凸性/仿射性(Affinity):\(\sum _{j=1}^{|B|} w _{ij} = 1\)
- 所有骨头对一个顶点的总影响权重等于 1
- 这保证了如果所有骨头都不动,顶点也不动
-
稀疏性(Sparseness):\(|\{w _{ij} | w _{ij} \neq 0\}| \leq |K|\)
- 每个顶点最多被 \(|K|\) 根骨头影响
- 在实际应用中,通常 \(|K| = 4\)(称为 4-bone skinning)
- 这是为了 GPU 加速——每个顶点只需计算 4 个变换
刚性骨骼约束
旋转矩阵 \(\mathbf{R} _{j} ^{t}\) 必须满足正交约束:
$$ \mathbf{R} _{j} ^{t} {}^{T} \mathbf{R} _{j} ^{t} = \mathbf{I}, \quad \det(\mathbf{R} _{j} ^{t}) = 1 $$
通俗理解:
"刚性"意味着骨头不能被拉伸、压缩或剪切。
旋转只会改变方向,不会改变长度。
对比:
- 刚性旋转:把一本书转个角度,书还是原来的形状
- 非刚性变换:把一本书拉长、压扁、撕扯——这些都不允许
P31
Linear Blend Skinning (LBS)
$$ {x}'_ i= \sum_ {j=1} ^ {m} w _ {ij}({Q}'_ jr_{ij}+{o}'_j) $$
- Used widely in industry
- Efficient and GPU-friendly
- Games like it
✅ Bind Pose:让骨骼与 Mesh 对齐,为 Bind Pose.
✅ Bind Pose 情况下 Motion 不一定为零。
P33
Automatic Skinning?
 |
 |
Pinocchio [Baran et al., 2007]
P37
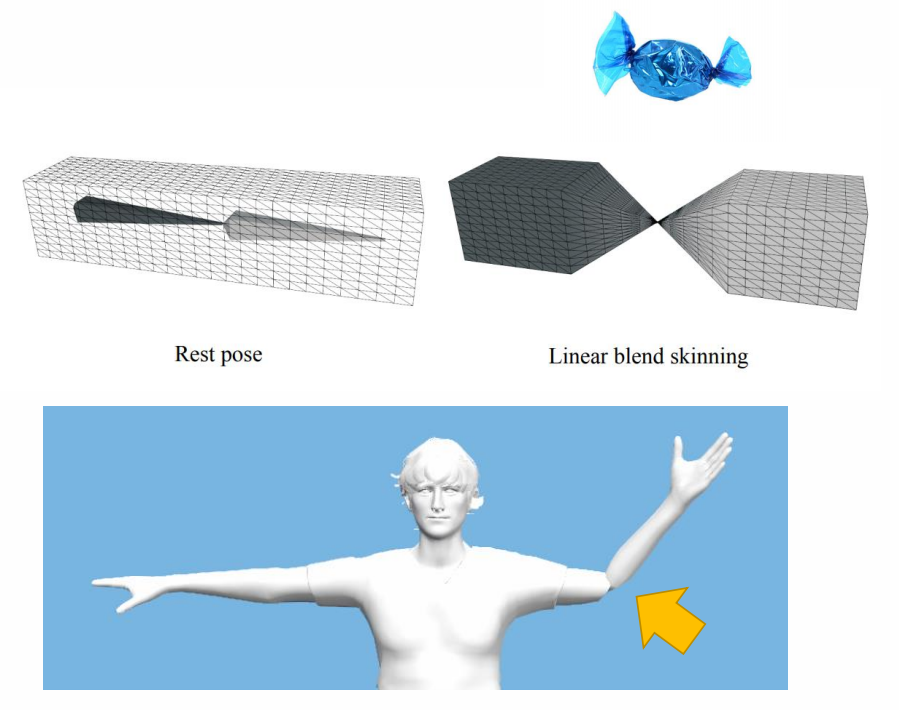
Linear Blend Skinning (LBS)

✅ 公式第一项对 \(R_j\) 所加权,所得到的很有可能不再是旋转矩阵。
存在的问题: Candy-Wrapper Artifact
P40
Advanced Skinning Methods
-
Multi-linear Skinning (we will not cover this)
- Multi-weight enveloping [Wang and Phillips 2002]
- Animation Space [Merry et al. 2006]
- ……
-
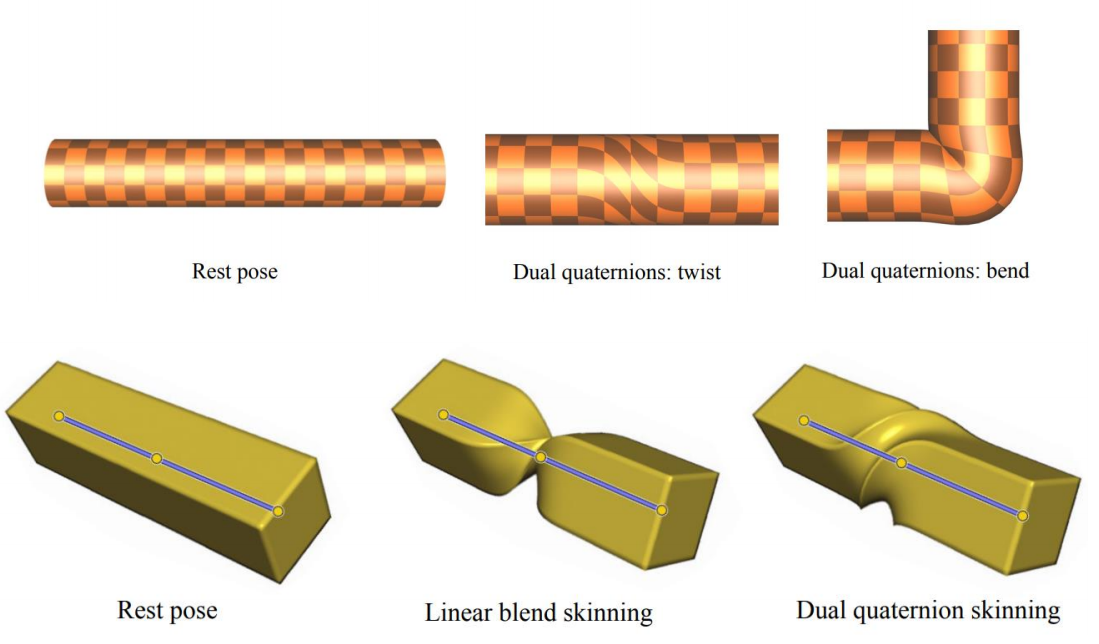
Nonlinear Skinning
- Dual-quaternion Skinning (DQS)
- Skelebones (PartMM) — GaussiAnimate (ReadPapers/220): 用 Part-aware Mixture Model 替代 LBS。核心:(1) 用空间距离 softmax 计算 part affinity 概率替代人工皮肤权重;(2) 用 MLP 学习的非线性残差 \(x + \Delta T_j(x)\) 替代刚体变换,突破 LBS 线性上限,PSNR 比 LBS 高 17.3%。原本用于 3DGS 驱动,理论上也可用于 Mesh 驱动,但 Mesh 场景下面临三个问题:(1) MLP 推理比 LBS 矩阵乘法慢,不利于实时渲染;(2) MLP 输出可能跨帧跳跃,时间一致性不如 LBS 稳定;(3) 现有引擎全基于 LBS/DQS 构建,替换绑定方案工程成本高。Mesh 本身有拓扑约束兜底,LBS/DQS/SSD 已足够;PartMM 对没有拓扑的 3DGS 价值更大。

✅ DQ:对偶四元数。
P41
Non-linear Skinning
quaternions and SLERP
Can we use quaternions and SLERP?
P42
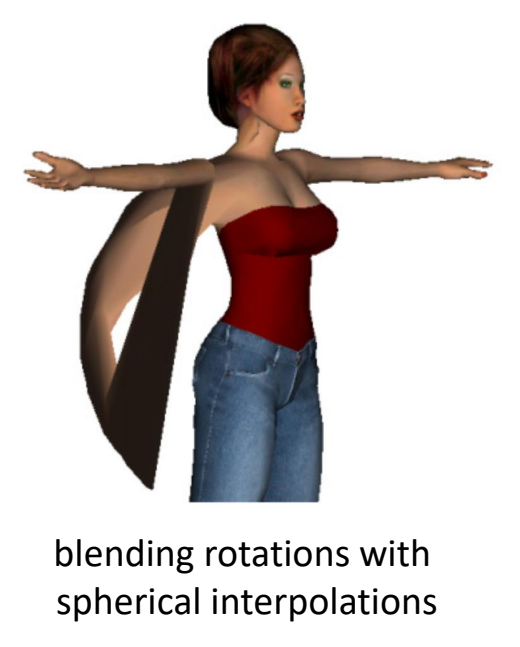
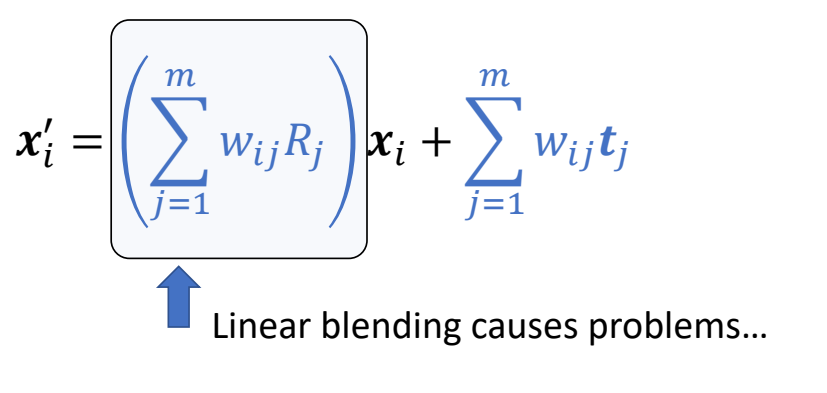
✅ 不行。原因:第一项与第二项必须要配合好,否则会乱掉。
P43
从公式角度来解释不行的原因
$$ {x}' _ i = ( \sum _ {j=1}^{m} w _ {ij} R _ j) x _ i+ \sum _ {j=1}^{m}w _ {ij}t_ j $$
$$ R \in SO(3) $$
$$ T_j=\begin{bmatrix} R_j & t_j\\ 0 &1 \end{bmatrix} \in SE(3) $$
✅ \(T_j\) 构成一个刚性变换群。
P46
Interpolation in 𝑆𝑂(3)
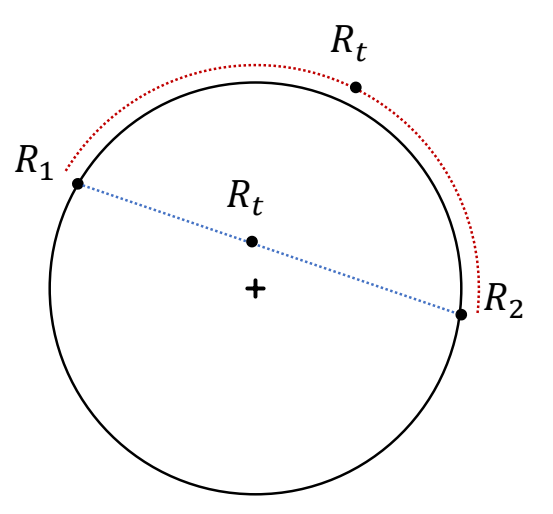
✅ 线性插值和 SLERP 插值 SO(3) 上。
P49
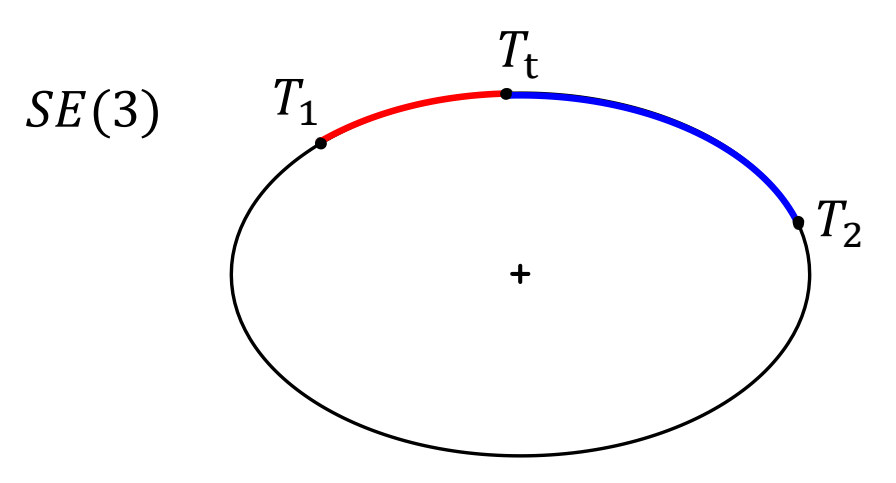
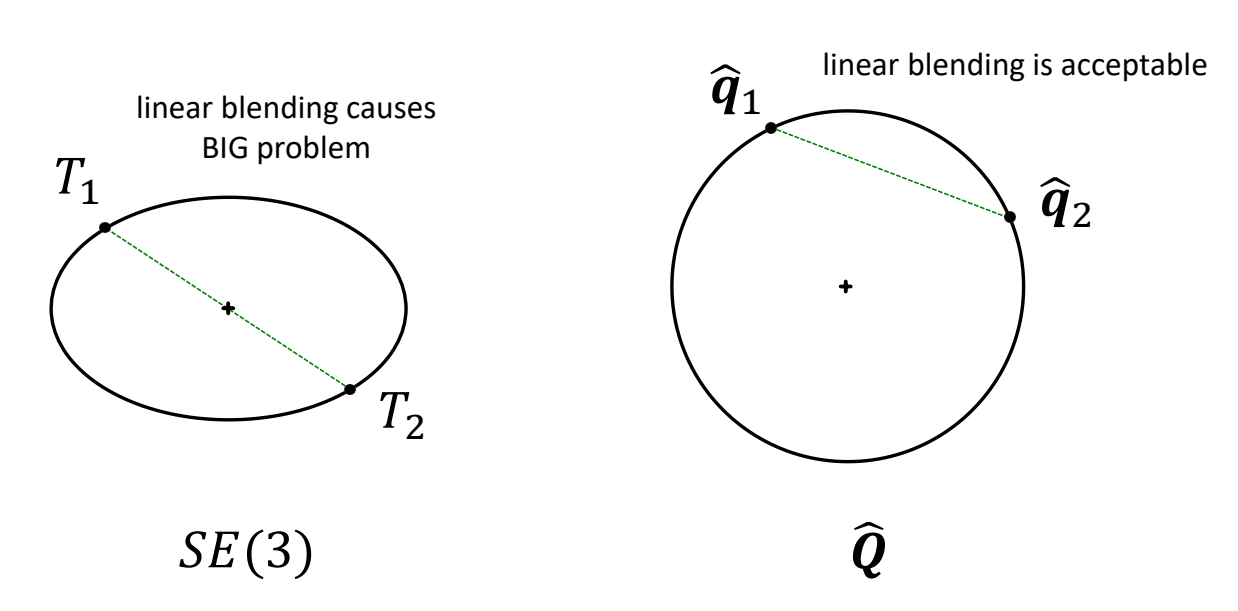
Interpolation in 𝑆𝐸(3)
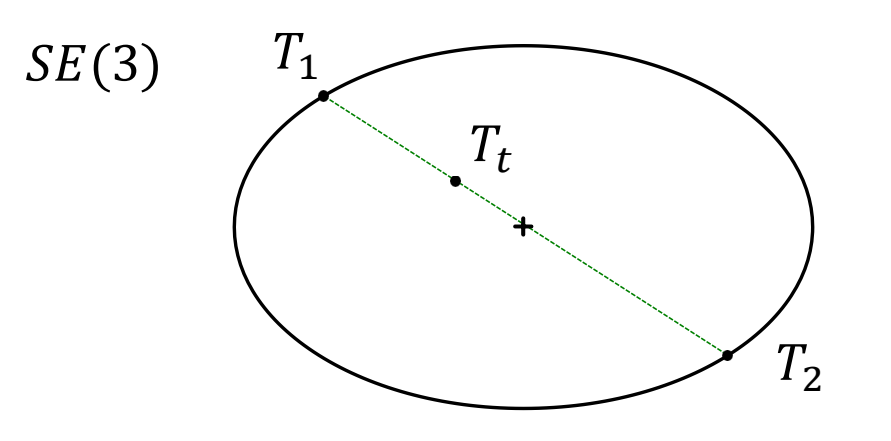
✅ SE(3)上的线性插值,插值到一个退化的点。
P51
Intrinsic Blending
P52
Dual-Quaternion Skinning (DQS)
- Approximation of intrinsic averages in SE(3)
Ladislav Kavan, Steven Collins, Jiri Zara, Carol O‘Sullivan. Geometric Skinning with
Approximate Dual Quaternion Blending, ACM Transaction on Graphics, 27(4), 2008.
✅ 把旋转 + 平移的刚性变换表达为对偶四元数。
P54
Dual Numbers
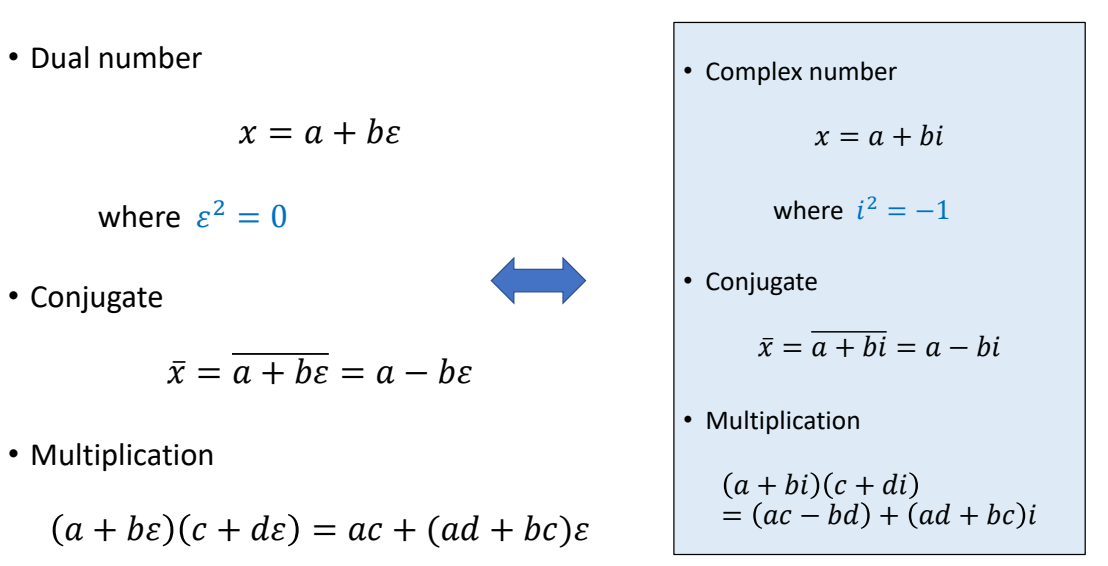
P55
Dual Quaternion
- Dual quaternion
$$ \hat{q} =q_0 + \varepsilon q_\varepsilon $$
$$ \text{where } \varepsilon^2=0 $$
A good note of dual-quaternion:
https://faculty.sites.iastate.edu/jia/files/inline-files/dual-quaternion.pdf
P56
Dual Quaternion
- Scalar Multiplication
$$ s\hat{q}=sq_r+sq_\varepsilon\varepsilon $$
- Addition
$$ \hat{q} _ 1 + \hat{q} _2=q _ {r1}+ q _ {r2} + \varepsilon (q _ {\varepsilon 1} + q _ {\varepsilon 2}) $$
- Multiplication
$$ \hat{q} _ 1 \hat{q} _ 2 = q _ {r1} q _ {r2} + \varepsilon (q _ {r1} q _ {\varepsilon 2} + q _ {r2} q _ {\varepsilon 1}) $$
P57
Dual Quaternion
- Dual quaternion
$$ \hat{q}=q_0+\varepsilon q_\varepsilon $$
- Conjugation
$$ \mathrm{I}:\hat{q}^* =q ^ * _ 0+\varepsilon q ^ * _ \varepsilon $$
$$ \mathrm{II}:\hat{q}^ {\circ} =q _ 0 - \varepsilon q _ \varepsilon $$
$$ \mathrm{III}: \hat{q} ^ \star = q ^ * _ 0 - \varepsilon q ^ *_ \varepsilon $$
$$ \quad \quad \quad \quad = ({\hat{q} ^ *}) ^ {\circ} = (\hat{q} ^ {\circ}) ^ * $$
$$ (\hat{q} _1\hat{q}_2)^\times =\hat{q} _1 ^\times \hat{q}_2^\times $$
- Norm
$$ ||\hat{q}||=\sqrt{\hat{q}^*\hat{q}} =||q_0||+\frac{\varepsilon (q_0\cdot q_\varepsilon) }{||q_0||} $$
P58
Dual Quaternion
- Unit dual quaternion: \(||\hat{q}||=1\), which requires:
$$ ||q_0||=1 $$
$$ q_0 \cdot q_\varepsilon=0 $$
P59
Dual Quaternion ⇔ Rigid Transformation
- Like quaternion, any rigid transformation \(T \in SE(3)\) can be converted into a unit dual quaternion
$$ Tx=Rx+t $$
$$ T=[R\mid t]\to \hat{q} =q_0+\varepsilon q_\varepsilon $$
$$ \begin{matrix} q_0=r \quad & \text{ quaternion of } R \quad \quad\quad\quad\\ q_\varepsilon =\frac{1}{2} tr & \text{ pure quaternion } t = (0,t) \end{matrix} $$
✅ 把一个刚性变换表示为对偶四元数。
P60
Dual Quaternion ⇔ Rigid Transformation
- Transform a vector \(v\) using unit dual quaternion
$$ {\hat{v} }' =\hat{q} \hat{v} \hat{q} ^\star $$
where
$$ \begin{align*} \hat{v} & = 1+\varepsilon (0,v) \\ & =(1,0,0,0)+\varepsilon (0,v_x,v_y,v_z) \end{align*} $$
$$ \quad $$
$$ \mathrm{III}: \hat{q} ^ \star = q ^ * _ 0 - \varepsilon q ^ *_ \varepsilon $$
$$ \quad \quad \quad \quad = ({\hat{q} ^ *}) ^ {\circ} = (\hat{q} ^ {\circ}) ^ * $$
P61
Dual Quaternion ⇔ Rigid Transformation
- Like quaternion, any rigid transformation \(T \in SE(3)\) can be converted into a unit dual quaternion
$$ T=[R\mid t]\to \hat{q} =q_0+\varepsilon q_\varepsilon $$
$$ \begin{matrix} q_0=r \quad \\ q_\varepsilon =\frac{1}{2} tr \end{matrix} $$
\(\hat{q}\) and \(-\hat{q}\) represent the same transformation \(\hat{Q}\) is a double cover of \(SE(3)\)
P62
Double Cover Visualized
P63
Interpolating Dual-Quaternion
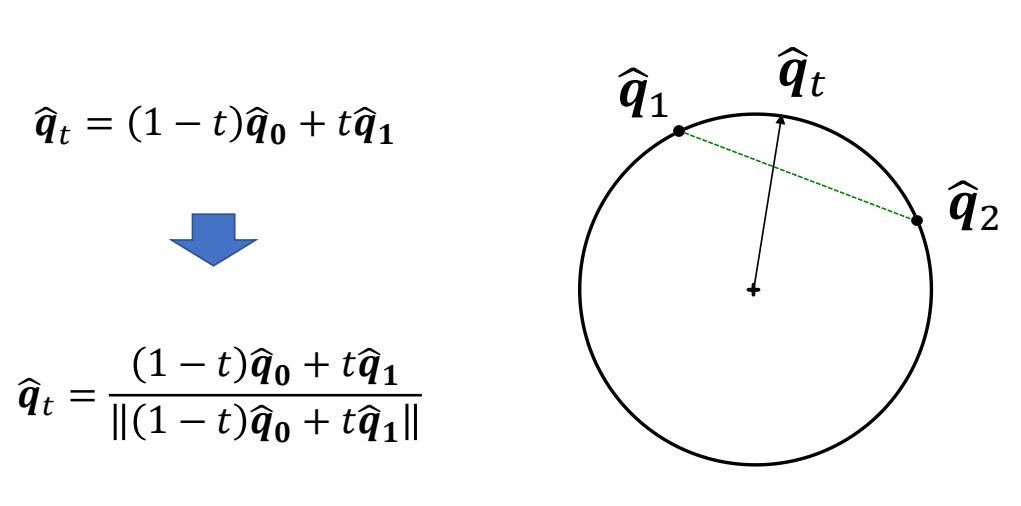
P64
Dual-Quaternion Linear Blending (DLB)

P65
Dual-Quaternion Skinning (DQS)
P66
Budging Artifact of DQS
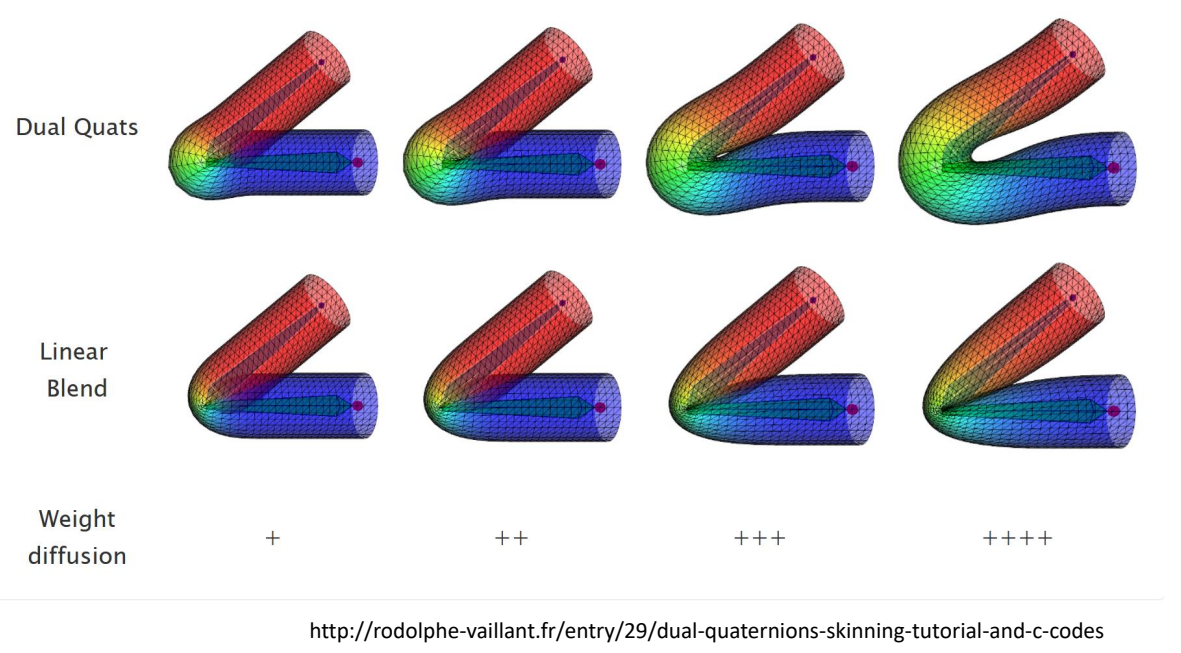
✅ 越往右蒙皮权重越光滑。
✅ DQBS 也有比较严重的 artifacts.
P67
How to Correct LBS?
✅ LBS 的天然缺陷
P69
How to Correct LBS?
P74
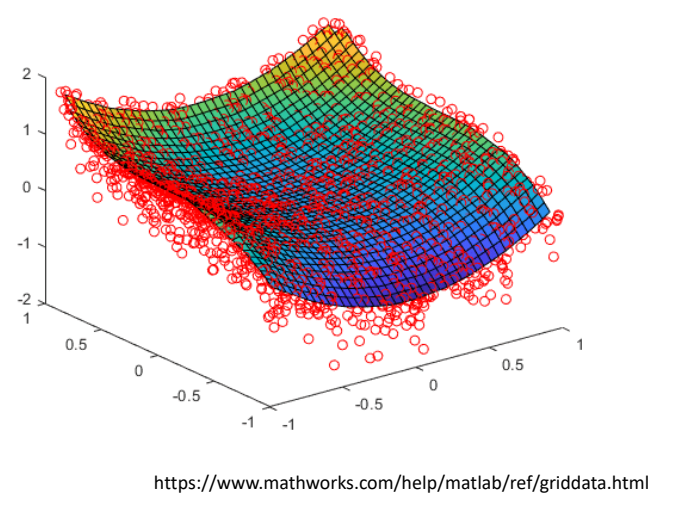
Scattered Data Interpolation
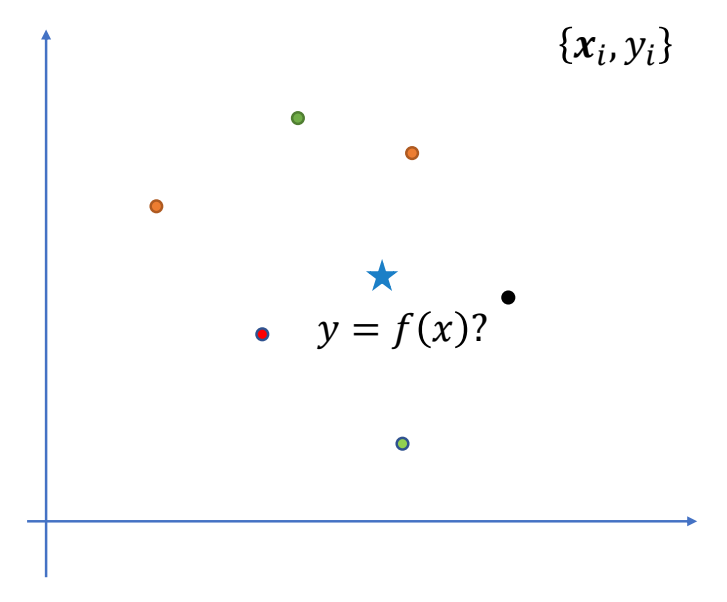
P76
Scattered Data Interpolation
- Linear
- Least squares
- Splines
- Inverse distance weighting
- Gaussian process
- Radial Basis Function
- ……
P81
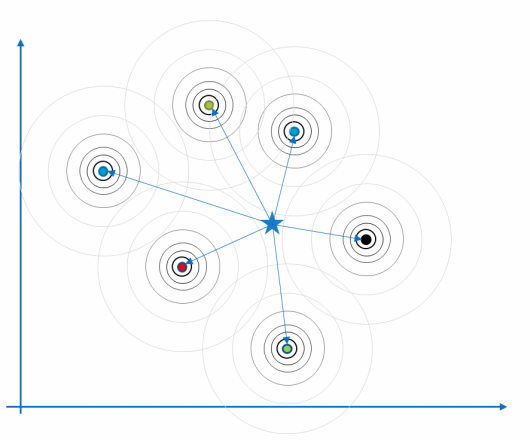
Radial Basis Function (RBF) Interpolation
$$ y=\sum_{i=1}^{k} w_i\varphi (||x-x_i||) $$
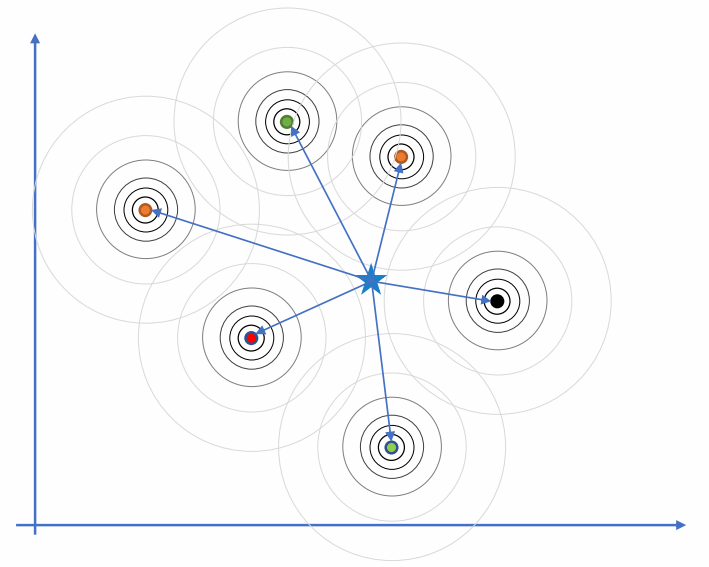
P83
Radial Basis Function (RBF) Interpolation
$$ y=\sum_{i=1}^{k} w_i\varphi (||x-x_i||) $$
How to compute \(w_i\) ? We need \(f(x_i)=y_i\)
$$
\begin{bmatrix}
R_{1,1} & R_{1,2} & \cdots & R_{1,K} \\
R_{2,1} & R_{2,2} & & \vdots \\
\vdots & & \ddots & \vdots \\
R_{K,1} & \cdots & \cdots & R_{K,K}
\end{bmatrix} \begin{bmatrix}
w_1\\
w_2 \\
\vdots\\
w_K
\end{bmatrix}=\begin{bmatrix}
y_1\\
y_2 \\
\vdots\\
y_K
\end{bmatrix}
$$
$$ R_{i,j}=\varphi (||x_i-x_j||) $$
P84
Radial Basis Function (RBF)
$$ y=\sum_{i=1}^{k} w_i\varphi (||x-x_i||) $$
- Gaussian:
$$ \varphi (r)=e^{-(r/c)^2} $$
- Inverse multiquadric:
$$ \varphi (r)=\frac{1}{\sqrt{r^2+c^2} } $$
- Thin plate spline:
$$
\varphi (r)=r^2 \log r
$$
- Polyharmonic splines:
$$
\varphi (r)=\begin{cases}
r^k,k=2n+1\\
\\
r^k \log r,k=2n
\end{cases}
$$
P85
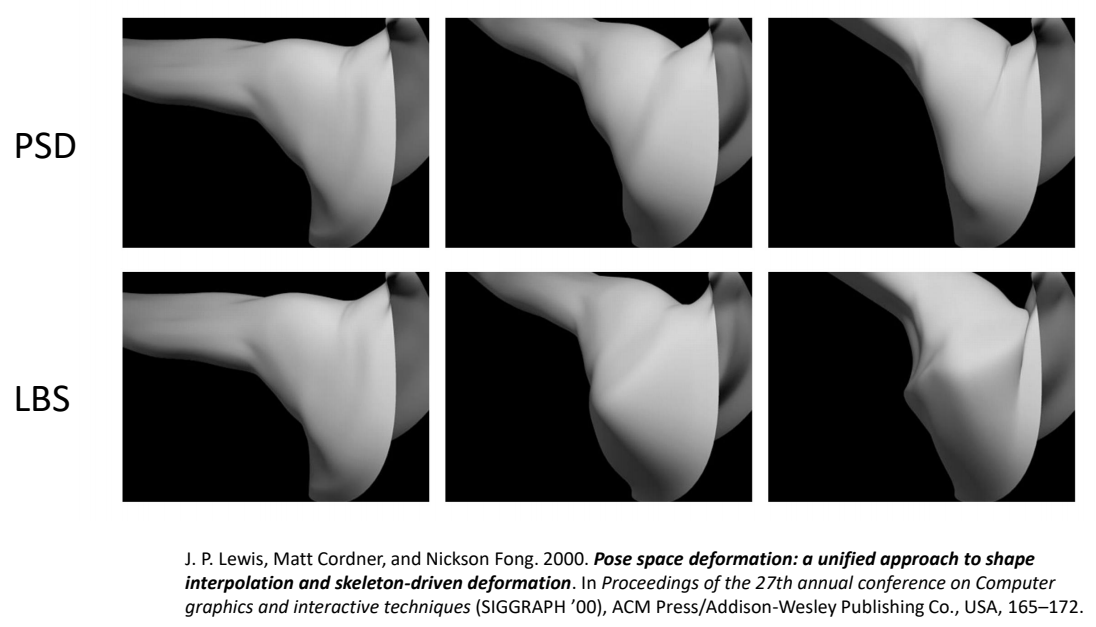
Pose Space Deformation
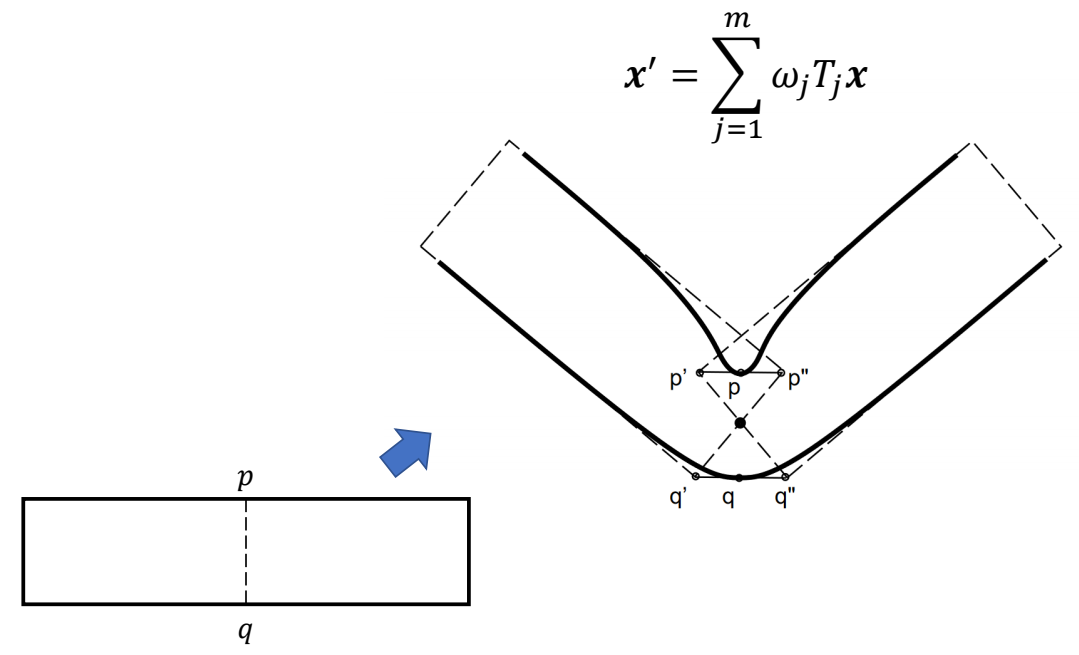
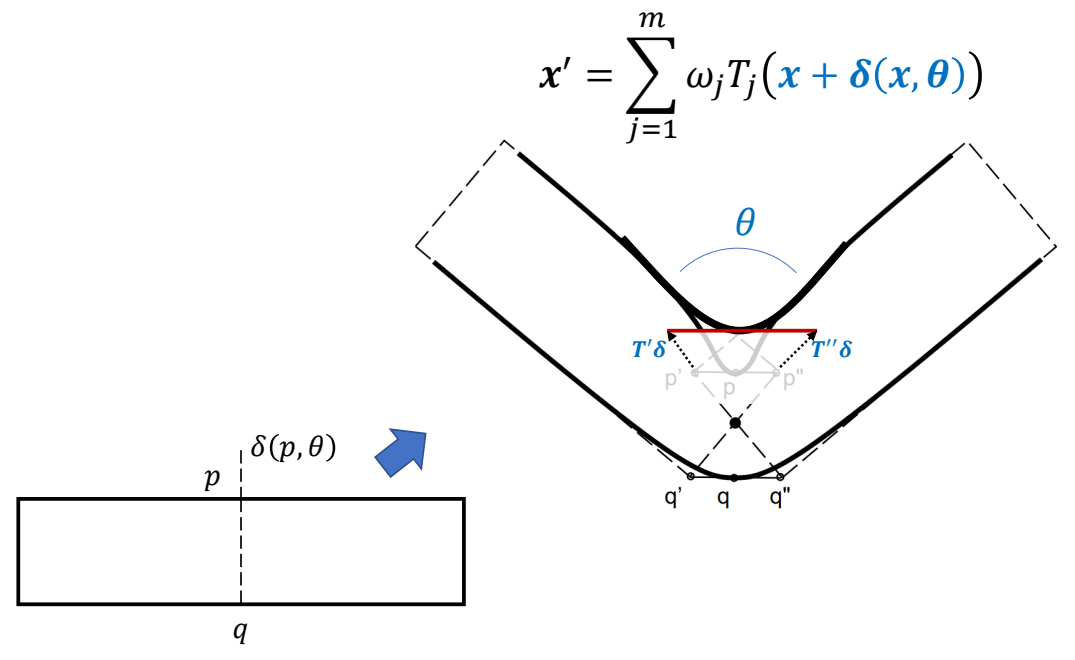
$$ {x}' =\sum_{j=1}^{m} w_iT_j (x+\delta (x,\theta )) $$
- \({x}'= SKIN(PSD(x))\)
- 𝑃𝑆𝐷 is implemented as RBF interpolation
- Example shapes can be created manually
- Or by 3D scanning real people → the SMPL model
J. P. Lewis, Matt Cordner, and Nickson Fong. 2000. Pose space deformation: a unified approach to shape
interpolation and skeleton-driven deformation. In Proceedings of the 27th annual conference on Computer
graphics and interactive techniques (SIGGRAPH ’00), ACM Press/Addison-Wesley Publishing Co., USA, 165–172.
P86
Pose Space Deformation
P87
Issues
- Per-shape or per-vertex interpolation
- Should we interpolate a shape as a whole?
- Local or global interpolation?
- Should a vertex be affected by all joints?
- Interpolation algorithm?
- Is RBF the only choice?
SIGGRAPH Course 2014 — Skinning: Real-time Shape Deformation
P88
Example-based Skinning (EBS) vs. Skeleton Subspace Deformation (SSD)
\(^\ast \)EBS: PSD
\(\quad\)
- Good: Easy to control
- Good: Good quality
- Good: Pose-dependent details (e.g. bulging muscle and extruding veins)
\(\quad\)
- Bad: Creating examples can be cumbersome
- Bad: Extra storage for examples
- Bad: Interpolation needs careful tuning
\(\quad\)
\(^\ast \)SSD: LBS, DQS, etc.
\(\quad\)
- Good: Easy to implement
- Good: Fast and GPU friendly
\(\quad\)
- Bad: Various artifacts
- Bad: Skinning weights needs careful tuning
- Bad: Hard to create pose-dependent details
P89
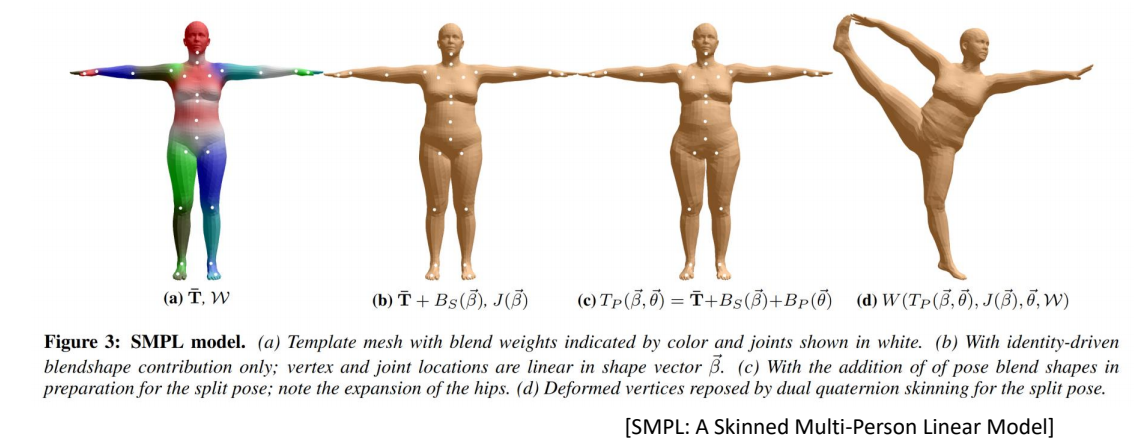
Example: SMPL Model
- A widely adopted human model in ML/CV
- Learned on real scan data
- Combines SSD and EBS techniques
P92
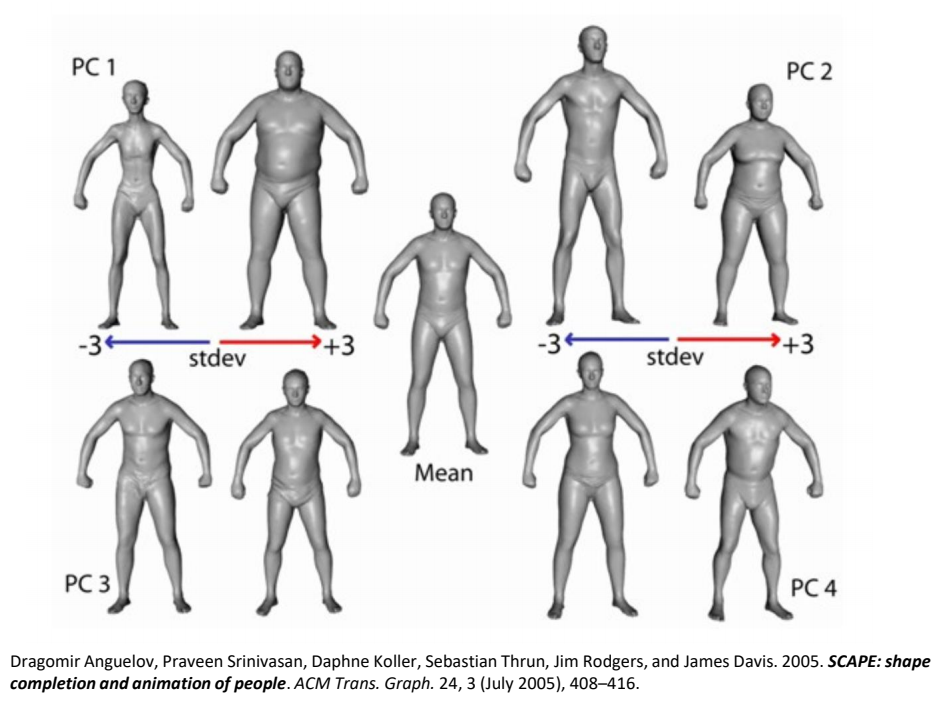
Recall: Principal Component Analysis (PCA)
- Given a dataset {\(x_i\)}, \(x_i \in \mathbb{R} ^N\), then PCA gives
$$ x_i=\bar{x}+\sum_{k=1}^{n} w_{i,k}u_k $$
- \(u_k\) is the \(k\)-th principal component
- A direction in \( \mathbb{R} ^N\) along which the rojection of {\(x_i\)} has the \(k\)-th maximal variance
- \(w_{i,k}=(x_i-\bar{x})\cdot u_k\) is the score of \(x_i\) on \(u_k\)
P93
Recall: Principal Component Analysis (PCA)
• Given a dataset {\(x_i\)}, \(x_i \in \mathbb{R} ^N\), the PCA can be computed by apply eigen decomposition on the covariance matrix
$$ \sum =X^TX=U\begin{bmatrix} \sigma ^2_1 & & & \\ & \sigma ^2_2 & & \\ & & \ddots & \\ & & \sigma ^2_N \end{bmatrix}U^T $$
-
\(X=[x_0-\bar{x}, x_1-\bar{x},\dots ,x_N-\bar{x}]^T\)
-
\(\sigma _i\ge \sigma _j\ge 0\) when \(i< j\), corresponds to the Explained Variance
-
\(U=[u_1,u_2,\dots,u_N]\)
P94
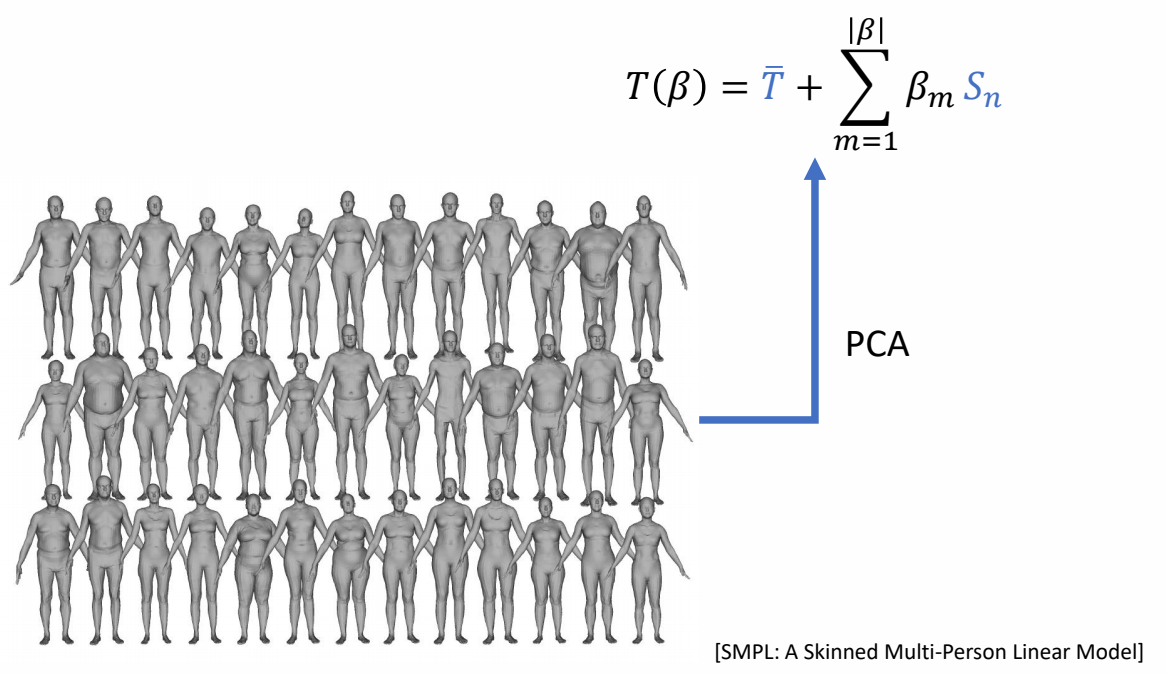
PCA over Body Shapes
P95
SMPL Model: Body Shape
P96
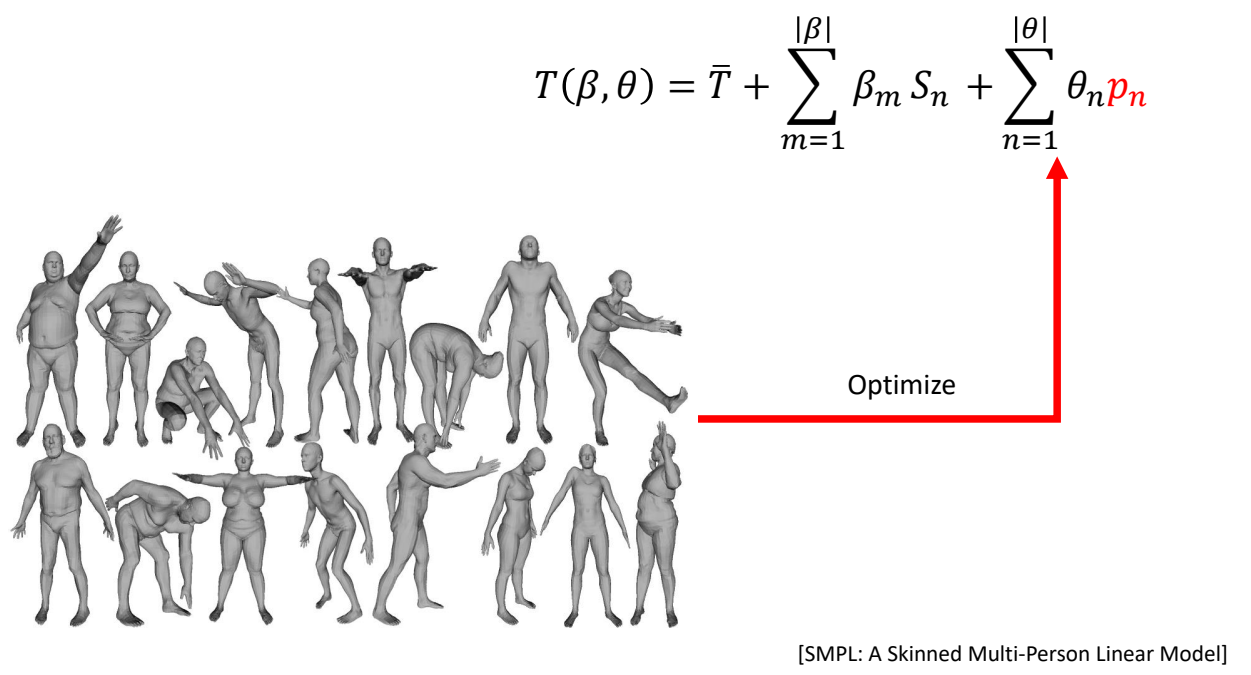
SMPL Model: Pose Blend Shapes
P97
SMPL Model: Deformation
$$ T(\beta ,\theta )=\bar{T} + \sum _ {m=1}^{|\beta |} \beta _ m S_ n + \sum _ {n=1}^{|\theta |}\theta _np_n $$
$$ x=SKIN(T(\beta ,\theta ),\theta ,w) $$
$$ SKIN:\text{LBS, DQS, etc}\dots $$

[SMPL: A Skinned Multi-Person Linear Model]
P99
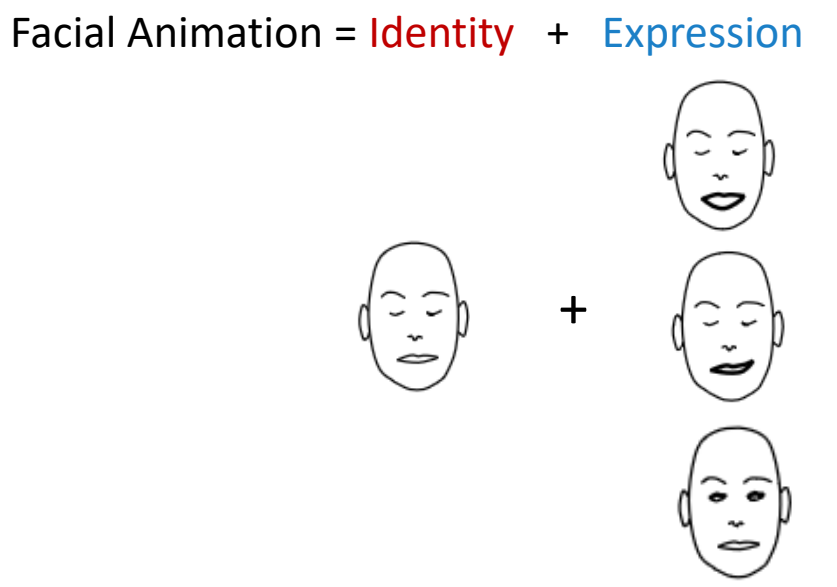
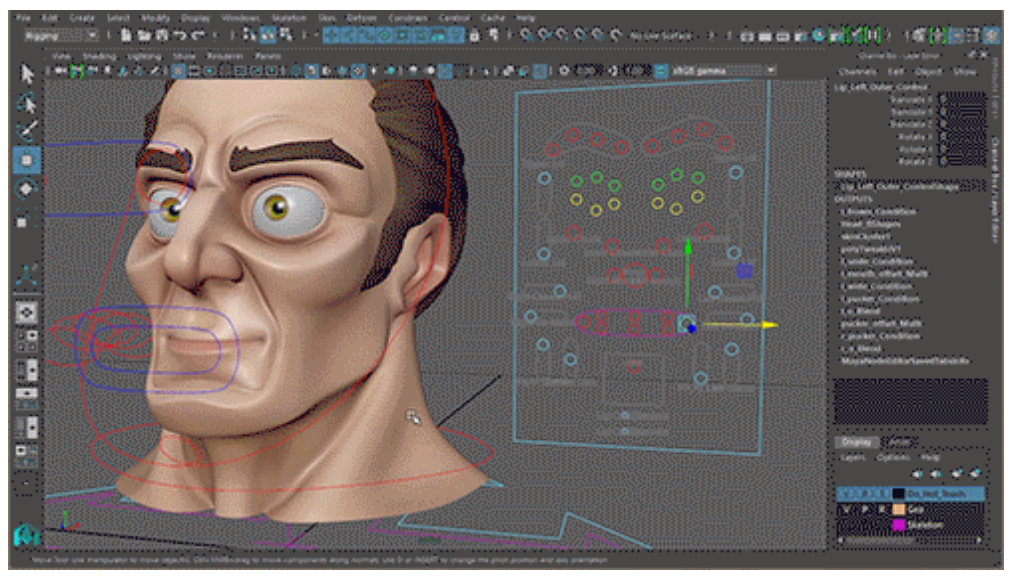
Facial Animation
P101
Facial Animation
✅ \(B_j\) 与 ID 无关,能做出差不多的效果。
✅ 要更精细的效果,可以定义与 ID 相关的 \(B_j\).
P102
Facial Blendshapes
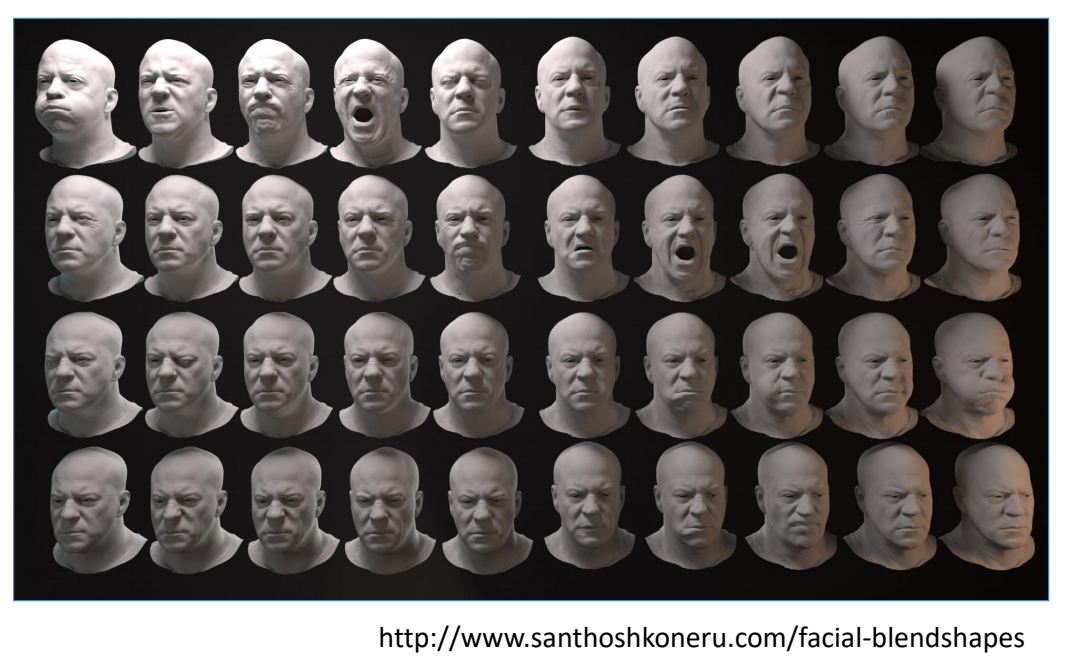
P103
A Typical Set of Blendshapes (ARKit)

P104
Blendshapes vs. Example-based Skinning
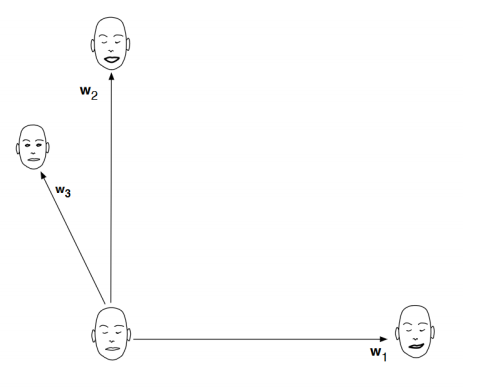
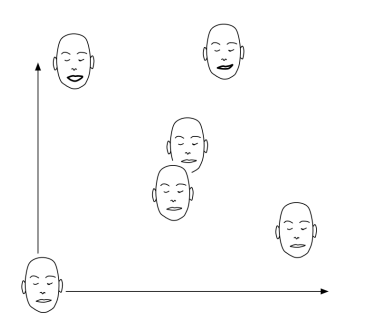
✅ 几种不同的表情基混合方式。
✅ 第二种,直接在几个脸之间做混合,适用于数据少的情况。
P105
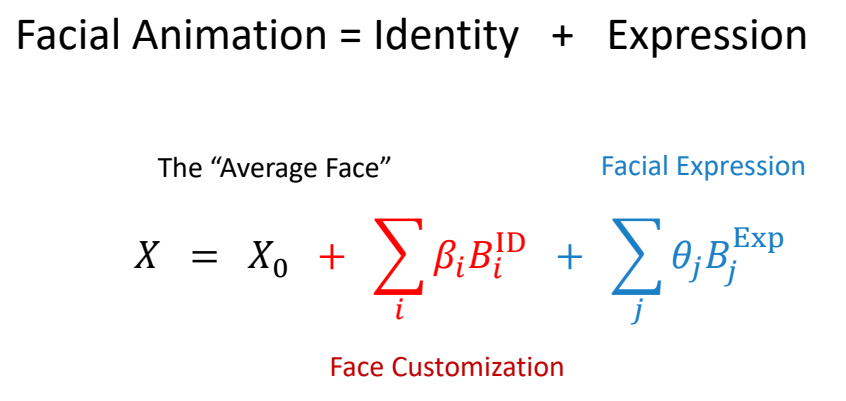
Morphable Face Models
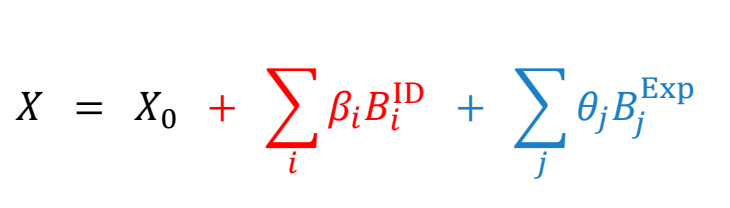
Egger et al. 2020. 3D Morphable Face Models - Past, Present, and Future. ACM Trans. Graph. 39, 5 (June 2020), 157:1-157:38.
✅ 第一项:平均脸。第二项:PCA. 第三项:表情基。
✅ \(B_i^{ID}\) 通常由 PCA 得到。
✅ 基于脸部肌肉的物理仿真。
P107
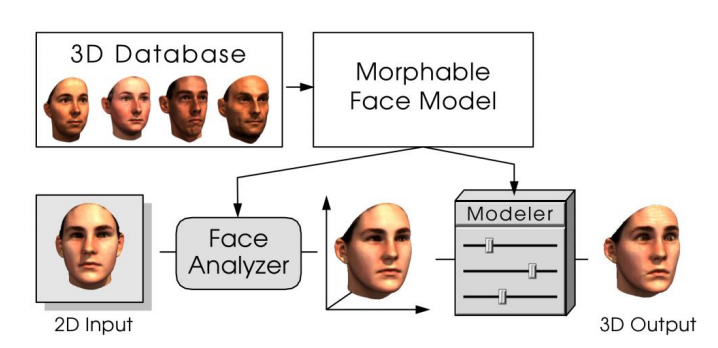
How to Animate a Face?
P110
Face Tracking
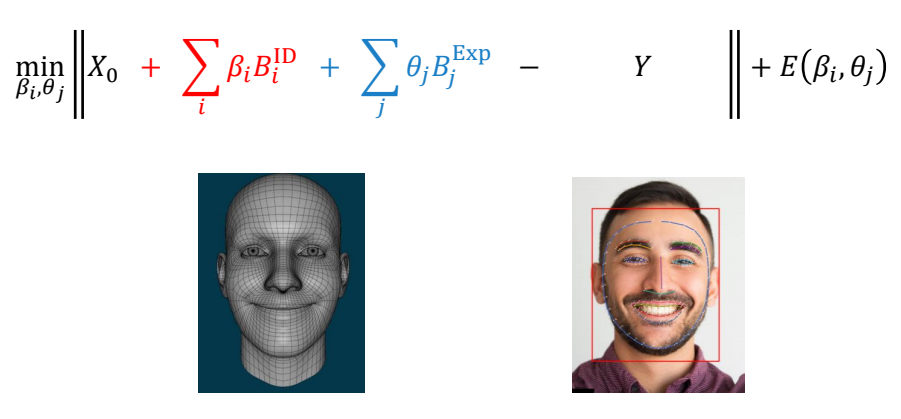
✅ 用一个视频人脸驱动 3D 人脸。
✅ 人脸 \(\overset{①}{\rightarrow} \) 特征点 \(\overset{②}{\rightarrow} \) 表情参数
✅ 1、提取 \(\quad\) 2、IK.
ReadPapers 蒙皮绑定相关论文索引
以下论文收录于 ReadPapers 项目,按核心程度分组。
核心蒙皮 / 绑定论文
| 论文 ID | 论文标题 | 发表 | 蒙皮方法 | 一句话总结 |
|---|---|---|---|---|
| 235 | Smooth Skinning Decomposition with Rigid Bones (SSDR) | SIGGRAPH Asia 2012 | LBS 逆问题 | 从示例姿态反推 LBS 权重和刚性骨骼变换,所有约束作为硬约束严格满足,块坐标下降 + 闭式 SVD 求解,比 LM 快 50-70× |
| 236 | Robust and Accurate Skeletal Rigging from Mesh Sequences | SIGGRAPH 2014 | 全自动绑定 | 从网格序列自动生成骨骼系统:运动驱动聚类 → MST 拓扑重建 → 迭代绑定(权重/关节/变换交替优化)+ 骨骼剪枝 |
基于 LBS 扩展的新表示方法
| 论文 ID | 论文标题 | 发表 | 蒙皮方法 | 一句话总结 |
|---|---|---|---|---|
| 220 | GaussiAnimate: Reconstruct and Rig Animatable Categories with Level of Dynamics | arXiv 2026 | Skelebones (骨架-骨骼脚手架) + PartMM | 从 235/236 取 LBG-VQ 聚类 + SSDR 生成外层 Bones,原创 MCS 骨架化 + 关节检测生成内层 Skeleton,PartMM 非参数化运动匹配解决骨架→骨骼绑定 |
| 234 | SC-GS: Sparse-Controlled Gaussian Splatting for Editable Dynamic Scenes | CVPR 2024 | LBS + 稀疏控制点 | 用 ~512 个稀疏控制点的 6DoF 变换 + LBS 权重插值驱动 ~10 万高斯点,ARAP 正则化保证局部刚性 |
| 225 | TaoAvatar: Real-Time Lifelike Full-Body Talking Avatars for AR via 3DGS | 2025 | SMPL-X++ LBS + 教师-学生蒸馏 | 构建穿衣参数化模板 SMPL-X++,StyleUnet 教师网络学习非刚性变形,蒸馏到轻量 MLP 实现实时 LBS 驱动 |
| 36 | GaussianAvatar: Towards Realistic Human Avatar Modeling from a Single Video | 2023 | SMPL LBS + 3DGS | 以 SMPL 为 template,每个 Mesh 顶点对应一个高斯球,直接复用 SMPL 的 LBS 蒙皮权重驱动 3D 高斯 |
动物/人脸绑定
| 论文 ID | 论文标题 | 发表 | 蒙皮方法 | 一句话总结 |
|---|---|---|---|---|
| 35 | MagicPony: Learning Articulated 3D Animals in the Wild | 2023 | LBS + DMTet 网格 | 单图重建铰接 3D 动物,隐式神经场转显式网格,用 LBS 驱动动物姿态 |
| 32 | Artemis: Articulated Neural Pets with Appearance and Motion Synthesis | 2023 | 体素级 LBS + NGI | CGI 动物资产的体素绑定与蒙皮,复用 CGI 骨骼和蒙皮权重,LBS 驱动八叉树体素形变 + 神经渲染 |
| 95 | SOAP: Style-Omniscient Animatable Portraits | 2024 | 自适应网格重构 + 骨骼插值 | 从单张肖像生成风格化虚拟形象,通过可微分渲染实现网格重拓扑和骨骼绑定,蒙皮权重由邻接边插值 |
说明:论文 ID 对应 ReadPapers 项目中的编号,点击可跳转至完整笔记。其中 235 (SSDR) 和 236 (Rigging) 是本节内容的直接延伸阅读;220 (GaussiAnimate) 展示了经典 LBS/DQS 思想在 3DGS 新表示中的延续。
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES105_mdbook/