P4
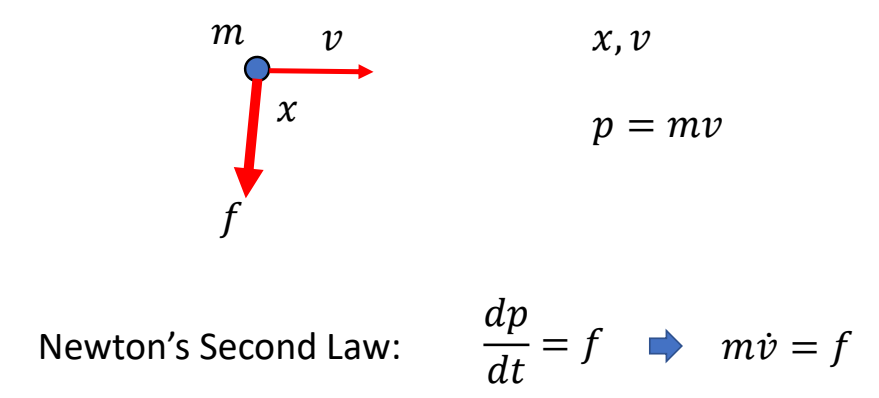
Recap
Dynamics of a Point Mass
P10
Rigid Body Dynamics
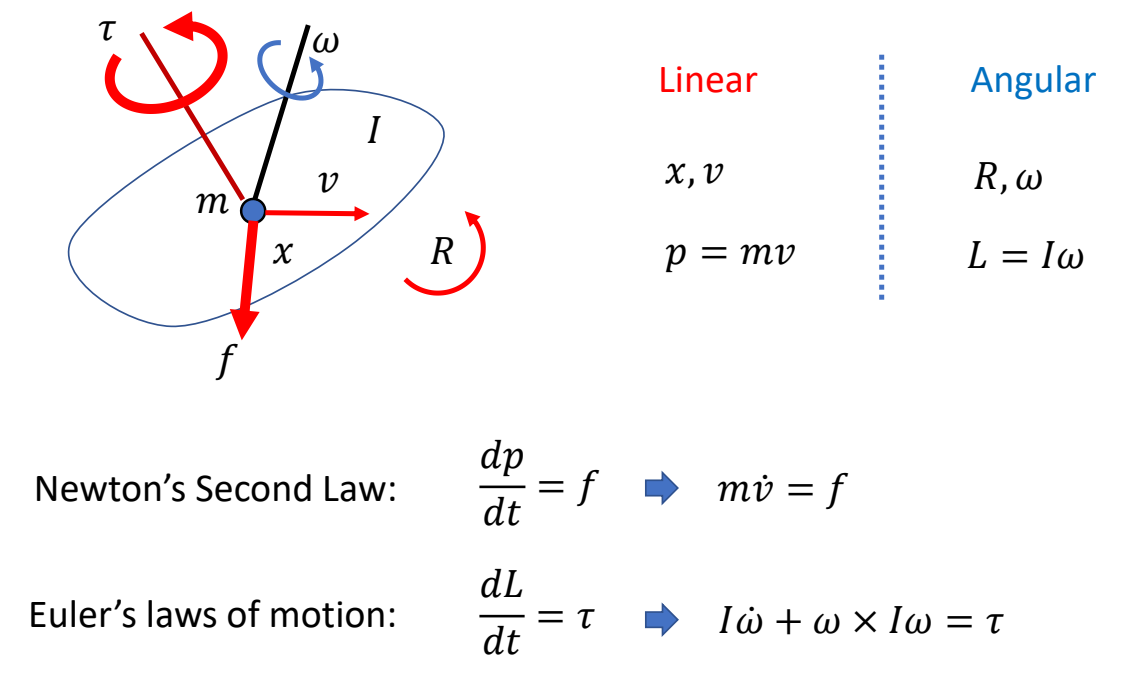
$$ \begin{bmatrix} mI_3 & 0\\ 0 & I \end{bmatrix}\begin{bmatrix} \dot{v} \\ \dot{\omega } \end{bmatrix}+\begin{bmatrix} 0\\ \omega \times I\omega \end{bmatrix}=\begin{bmatrix} f \\ \tau \end{bmatrix} $$
P12
Masses: \(m,I\)
Kinematics: \(x,v,R,\omega \)
Geometry:
• Box, Sphere, Capsule, Mesh, …
• Collision detection
• Compute \(m,I\)
✅ 在物理引擎里面定义一个刚体,需要提供这些参数。
P14
Dynamics of Articulated Rigid Bodies
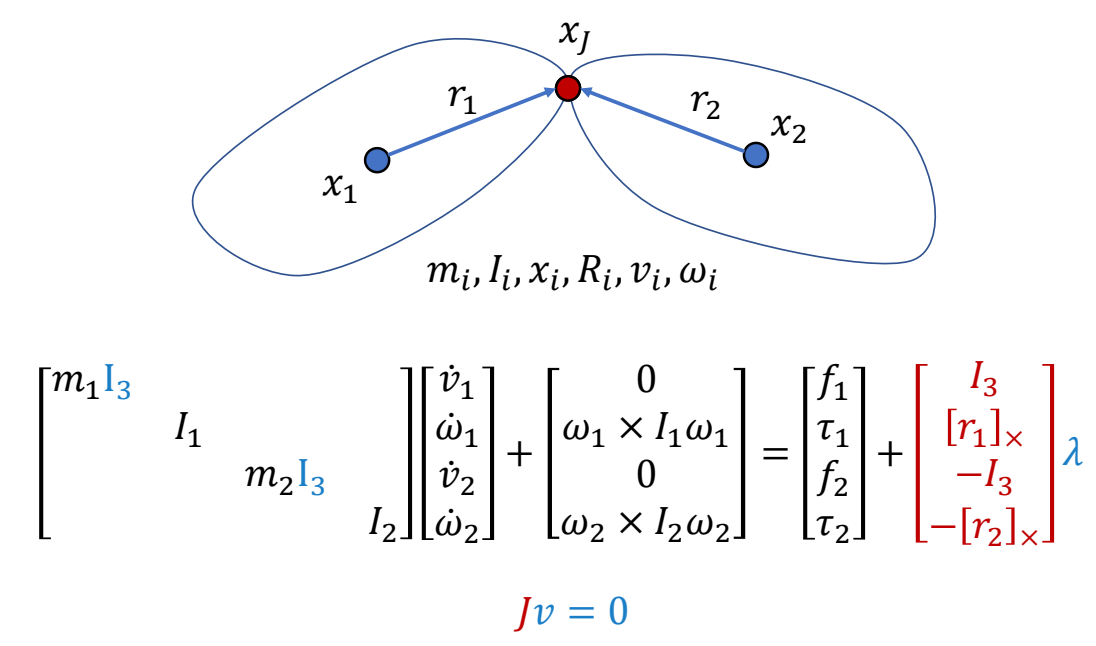
✅ 两个独立刚体,和一个不让它们断开的约束。
P15
$$ M\dot{v} +C(x,v) =f+J^T\lambda $$
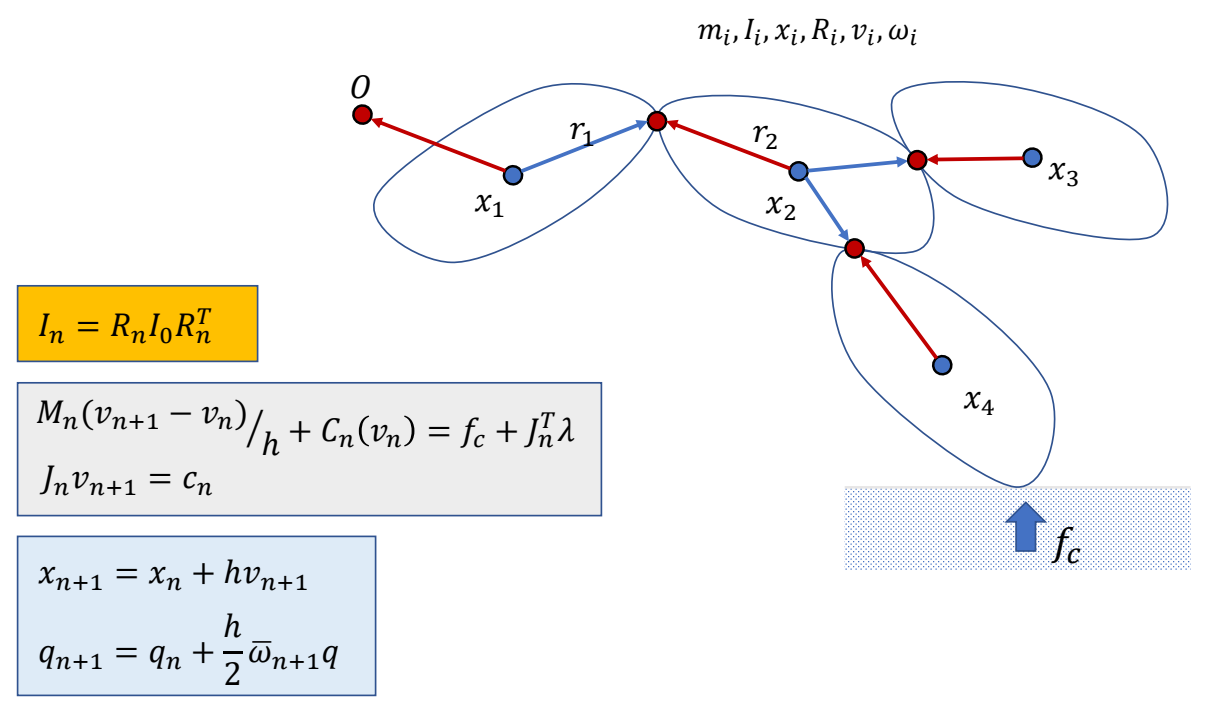
P16
Simulation of a Rigid Body System
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES105_mdbook/