P105
Joint Constraint
约束方程
✅ 前面是约束应用的简单例子,真正的问题是如何把约束应用到两个物体的连接约束上。
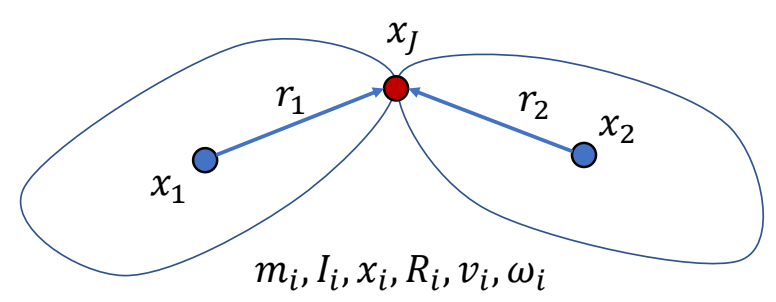
✅ 因此设计约束:从 \(x_1\) 求 \(x_J\)位置 和从 \(x_2\) 求 \(x_J\)位置所得结果应该相同。
$$ x_1+R_1r_1=x_J=x_2+R_2r_2 $$
对\(dt\)求导:
$$ v_1+\omega _1\times r_1=v_2+\omega _2\times r_2 $$
P106
✅ 整理得矩阵形式,得:
$$ \begin{bmatrix} I_3 & -[r_1] _ \times & -I_3 & [r_2] _ \times \end{bmatrix}\begin{bmatrix} v_1 \\ w_1 \\ v_2 \\ w_2 \end{bmatrix}=0 $$
✅ 矩阵乘法第一项为 \(J\),第二项为 \(v\). 进一步简化为:
$$ Jv=0 $$
P107
运动方程+约束方程
$$ \begin{align*} M\dot{v} +C(x,v)& =f+J^T\lambda \\ Jv&=0 \end{align*} $$
✅ 公式 1:运动方程。公式 2:约束方程。
✅ 运动方程与约束方程联立,可以解出约束力\(f_J\),以及下一时刻的速度。
P109
Different Types of Joints
✅ 前面描述的是 Ball Joint的约束。
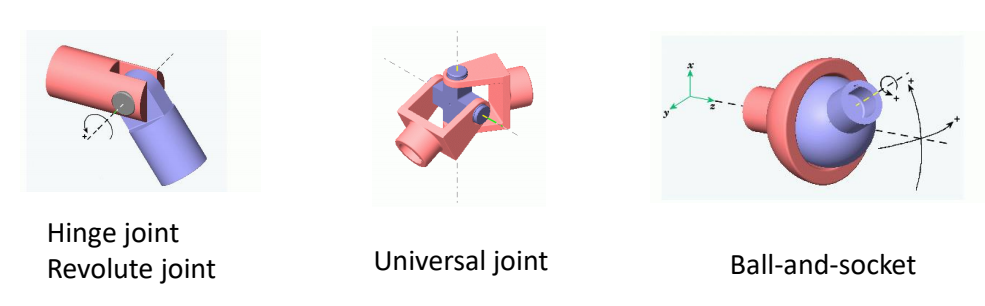
✅ Hinge 约束:除了位置还有角速度约束,在某个轴上的角速度应当一致。Universal 类似。
P110
A System with Many Links Joints
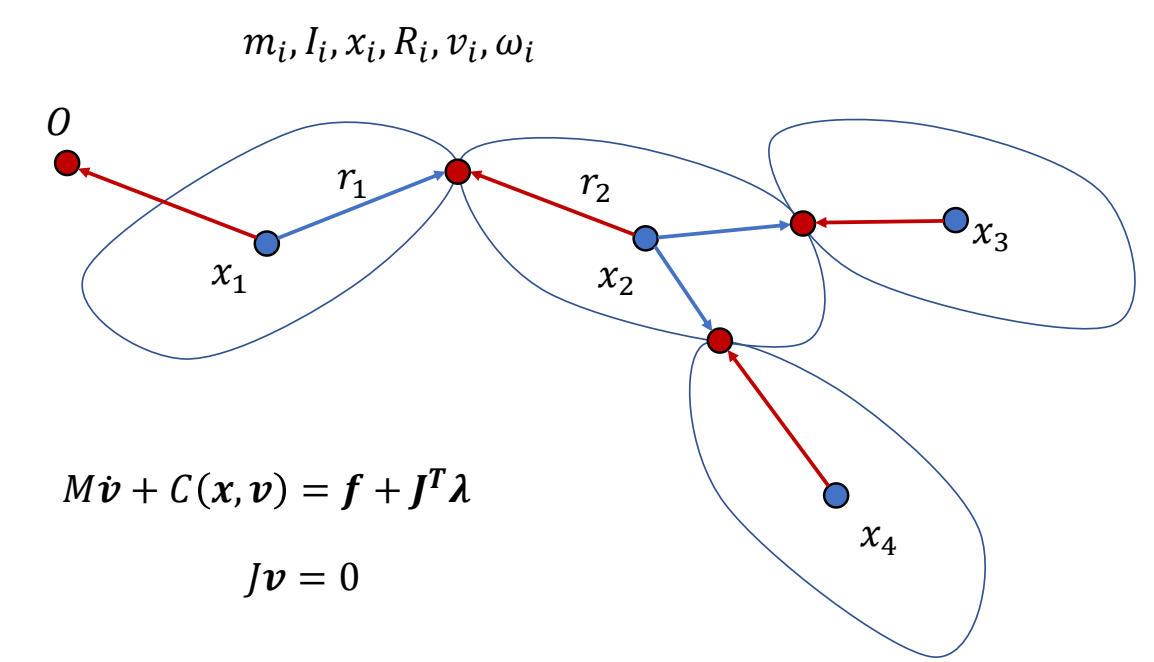
✅ 分段多刚体在公式上没有本质区别,只是矩阵更大一点。
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES105_mdbook/