P2
Outline
-
Simulating & Actuating Characters
- Joint torques
-
PD (Proportional-Derivative) control
✅ 在仿真基础之上,如何驱动角色动画,如何动得更好,更真实。
✅(1)控制力如何施加到角色身上
✅(2)如何计算控制力
Simulating & Actuating Characters
P17
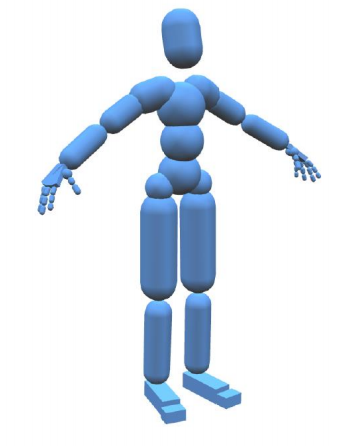
Defining a Simulated Character
Rigid bodies:
- \(m_i,I_i,x_i,R_i\)
- Geometries
Joints:
- Position
- Type
✅ Type指关节的类型,例如 Hint、Universal等。它决定了约束方程。
- Bodies
✅ 关节的数量比刚体的数量少1
✅ 仿真过程中通常使用简单几何体代替 Mesh. 为了便于碰撞检测的计算,以及辨别里外。
P19
Simulating a Character Pipeline

✅ 这个仿真流程是 ragdoll 效果。
P22
Actuating a Rigid Body
✅ 想让角色做指定动作,不能直接修改其状态,而是控制力影响状态。
| 力加在质心上,只会导致平移,不会导致旋转。 |  |
| ✅ 在物体边缘旋加力,等价于在质心施加力,并施加一个导致旋转的力矩。 | 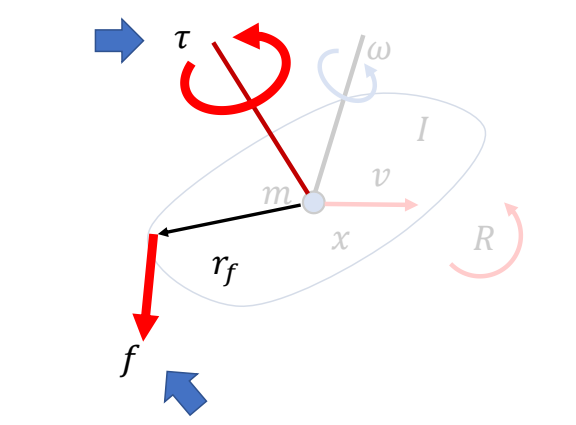  |
| ✅ 在质心上施加一个力矩,等价于施加一对大小相同方向相反的力。在质心处的合力为零,不会产生位移,只会产生旋转。 ✅ 力矩只是数学上的概念。 | 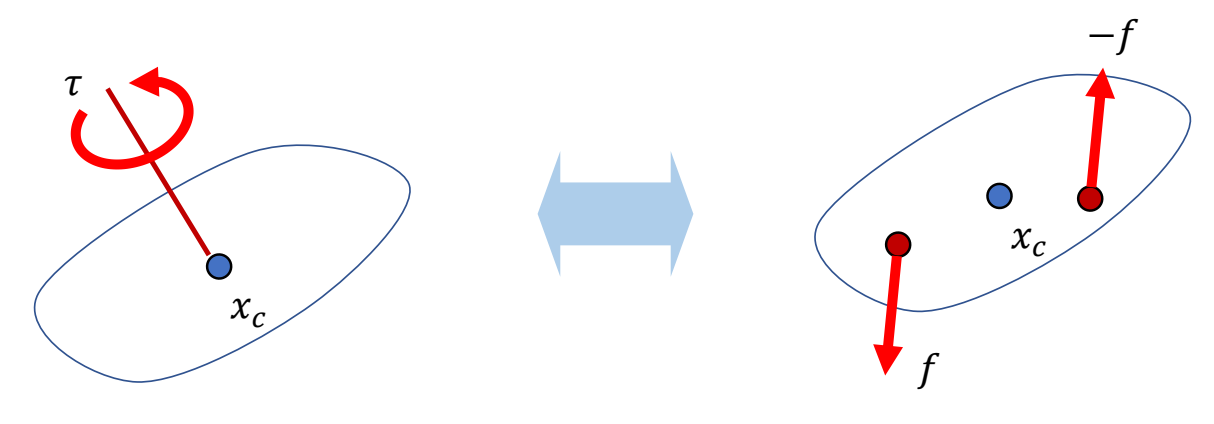 |
P26
Actuating Articulated Rigid Bodies
| ✅ 为了驱动角色,可以单独对每个刚体施加力或力矩。 | 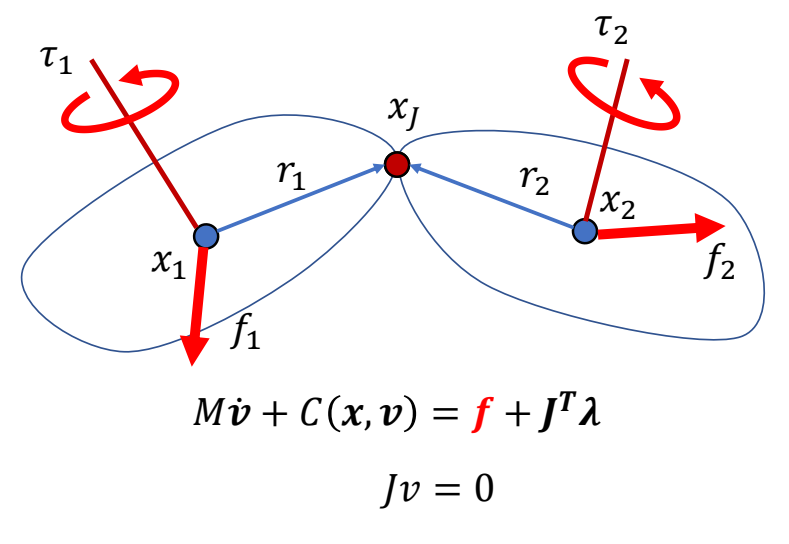 |
| ✅ 也可以在关节上施加力矩。 | 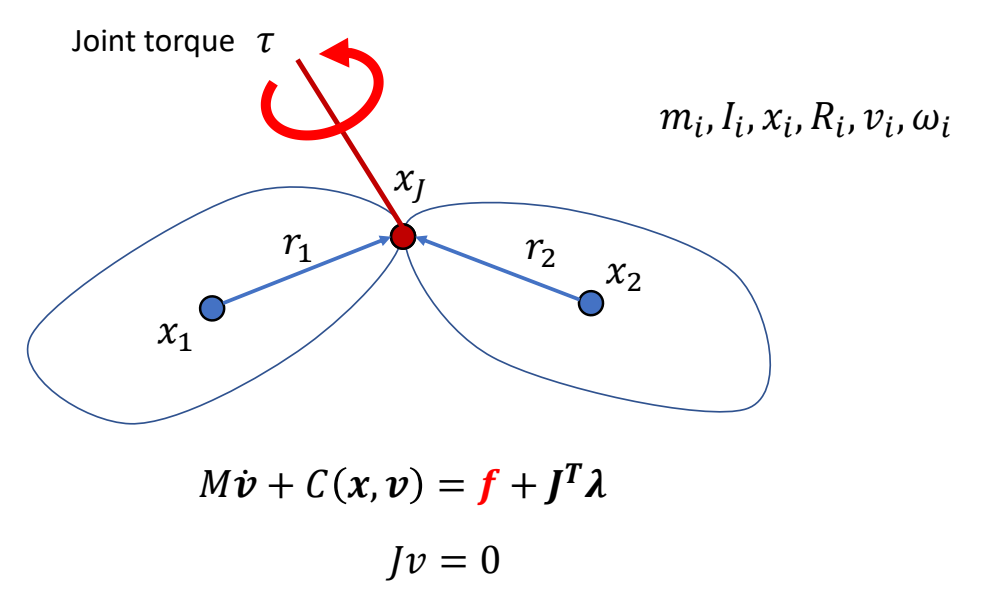 |
P29
Joint Torques
What is a joint torque?
How is a joint torque applied?
✅ 回顾前面公式,力和力矩都是施加在刚体上的,如何施加在关节上?
P33
什么是Joint Torques
✅ 关节上的力矩,可以看作是一个刚体对另一个刚体在关节处施加的成对的力。其合力为零但每个力施加的位置不同,可以转化为对另一刚体的力矩。
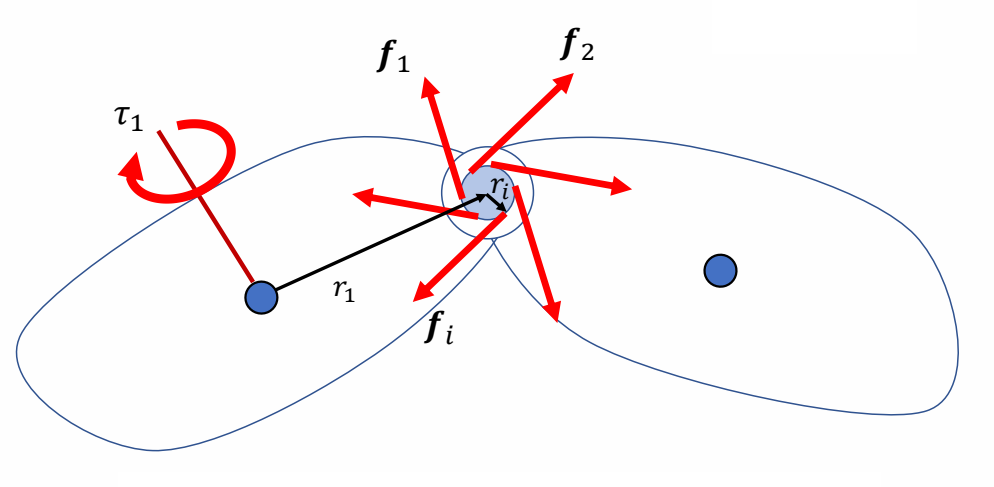
$$ \sum_{i}^{} f_i=0 $$
✅ 每个力都会对其中一个刚体的质心上产生力矩,合力矩不为0。
$$ \tau _1= \sum _ {i}^{} (r_1+r_i) \times f_i=r_1 \times \sum _ {i}^{}f_i + \sum _ {i}^{}r_i \times f_i $$
P34
由于
$$ \sum _ {i}^{} f_i=0 $$
得:
$$ \tau _1= \sum _ {i}^{} r_i \times f_i \quad \quad \quad \quad \tau _2= -\sum _ {i}^{} r_i \times f_i $$
✅ 另一个方向同理。
✅ 力矩跟关节的位置没有关系。
P36
结论:
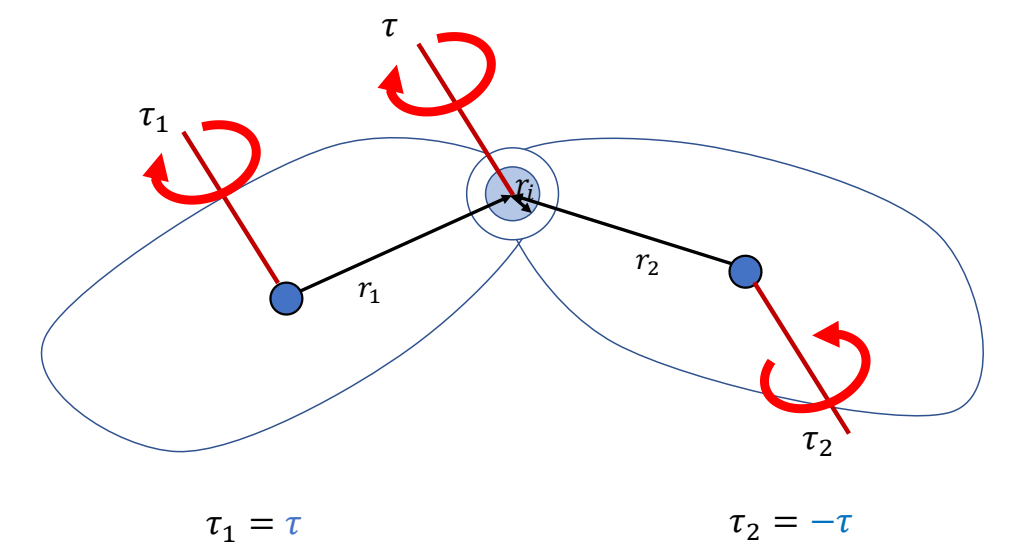
✅ 在关节上施加力矩 \( \tau\) 等价于在一个刚体上施加 \( \tau\),在另一个刚体上施加 \(- \tau\).
P38
怎样施加Joint Torques
Applying a joint torque \( \tau\):
- Add \( \tau\) to one attached body
- Add \( -\tau\) to the other attached body
$$ M\begin{bmatrix} \dot{v}_1 \\ \dot{\omega }_1 \\ \dot{v}_2\\ \dot{\omega }_2 \end{bmatrix} + \begin{bmatrix} 0\\ \omega_1 \times I_1 \omega _1\\ 0\\ \omega_2 \times I_2 \omega _2 \end{bmatrix}=\begin{bmatrix} 0 \\ \tau \\ 0 \\ -\tau \end{bmatrix}+J^T\lambda $$
$$ Jv=0 $$
✅ 通常在子关节上加 \(\tau \),在父关节上加 \(-\tau \).
P40
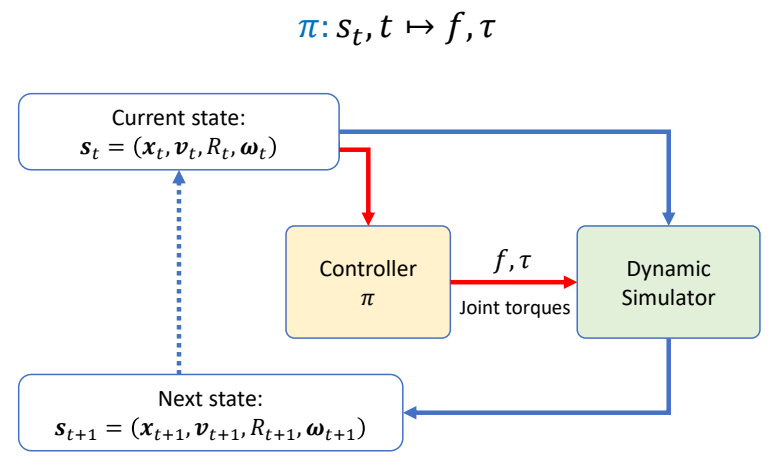
Simulating + Controlling a Character
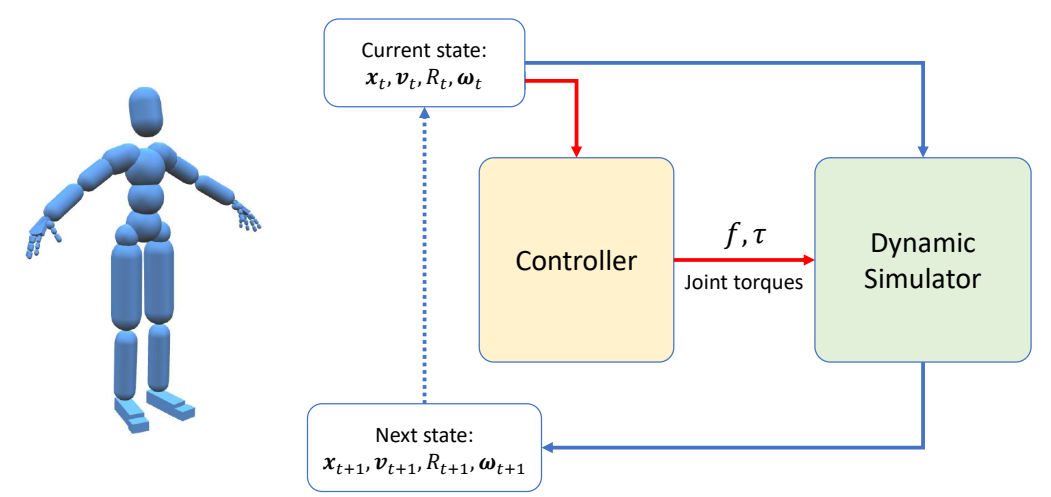
✅ 控制器,根据当前角色状态,以及额外控制信号实时计算出 \(f \) 和 \(\tau \),影响角色动作变化。
P44
Forward Dynamics vs. Inverse Dynamics
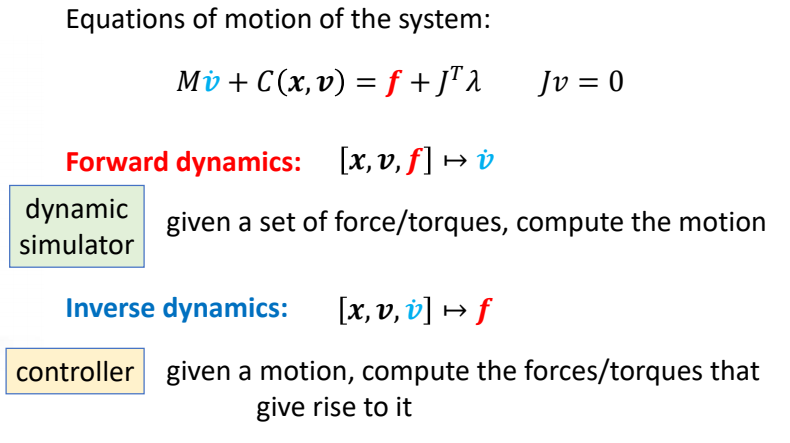
✅ 运动方程,本质上是建立力与加速度之间的联系。
✅ 前向与后向,是一个运动方程的两种用法。
✅ 仿真器为前向部分,控制后逆向部分。
P46
Fully-Actuated vs. Underactuated
在上一节中,\(f\) 与 \(V\) 的自由度可能是不同的。\(f\) 是关节数\( × 3\),\(V\) 是刚体数\( × 3\)。
 |  |
| If #actuators ≥ #dofs, the system is fully-actuated | If #actuators < #dofs, the system is underactuated |
| For any \([x,v,\dot{v} ]\), there exists an \(f\) that produces the motion | For many \([x,v,\dot{v} ]\) , there is no such \(f\) that produces the motion |
| ✅ 可以精确控制机械臂到达目标状态。 | ✅ 不借助外力情况,人无法控制 Hips 的状态(位置)。 |
✅ #actuators:\(f \) 和 \(\tau \) 的自由度。
✅ #dofs:角色状态的自由度。
✅ 避免让角色掉入无法控制的状态。
[❓] 一个关节边接多个刚体是不是也会导欠驱动?
P49
Feedforward vs. Feedback
| Feedforward control | Feedback control |
|---|---|
| \(f,\tau =\pi (t)\) | \(f,\tau =\pi (s_t,t)\) |
| Apply predefined control signals without considering the current state of the system | Adjust control signals based on the current state of the system |
| Assuming unchanging system. | Certain perturbations are expected. |
| Perturbations may lead to unpredicted results ✅ 如果角色受到挠动而偏离了原计划,无法修正回来。 | The feedback signal will be used to improves the performance at the next state. |
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES105_mdbook/