P4
Physics-based Character Animation
[ControlVAE – Yao et al. 2022]
角色的运动方式依赖于力学而不是数据。
✅ 物理方法的难点:
✅ (1) 仿真:在计算机中模拟出真实世界的运行方式。
✅ (2) 控制:生成角色的动作,来做出响应。
P5
Outline
- Simulation Basis
- Numerical Integration: Euler methods
- Equations of Rigid Bodies
- Rigid Body Kinematics
- Newton-Euler equations
- Articulated Rigid Bodies
- Joints and constraints
- Contact Models
- Penalty-based contact
- Constraint-based contact
https://www.cs.cmu.edu/~baraff/sigcourse/
✅ 角色物理动画通常不关心仿真怎么实现。
✅ 但也可以把仿真当成白盒,用模型的方法来实现。
P57
Kinematics vs. Dynamics
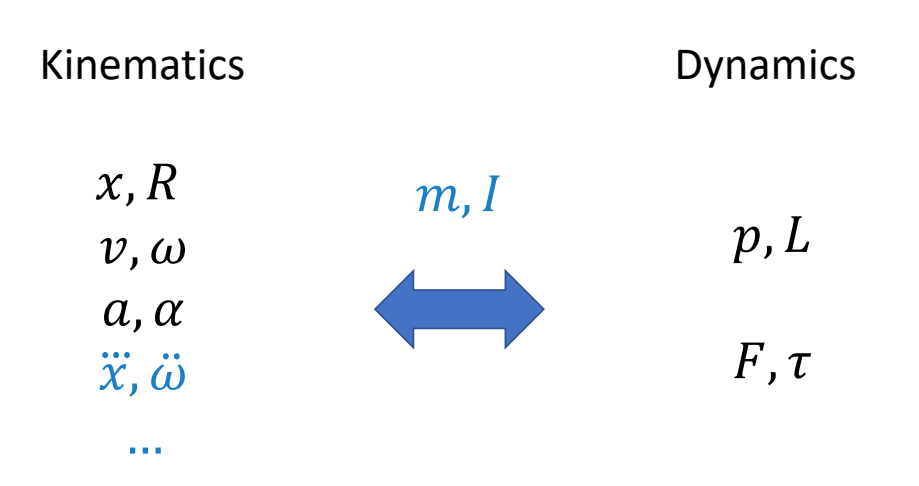
✅ 运动学与动力学,主要区别在于有没有考虑角色质量。因为质量代表惯性,有惯性就不能瞬移。
✅ 动力学基本概念跳过。P58-P89
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES105_mdbook/