P52
Linear Quadratic Regulator (LQR)
- LQR is a special class of optimal control problems with
- Linear dynamic function
- Quadratic objective function
✅ LQR 是控制领域一类经典问题,它对原控制问题做了一些特定的约束。因为简化了问题,可以得到有特定公式的 \(Q\) 和 \(V\).
P53
A very simple example
问题描述
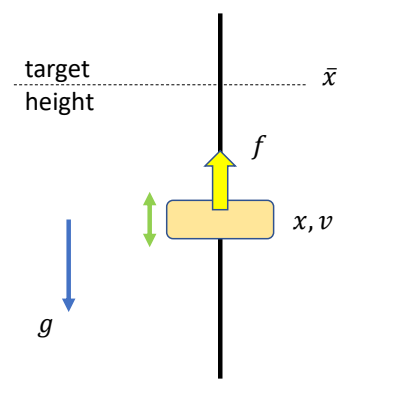
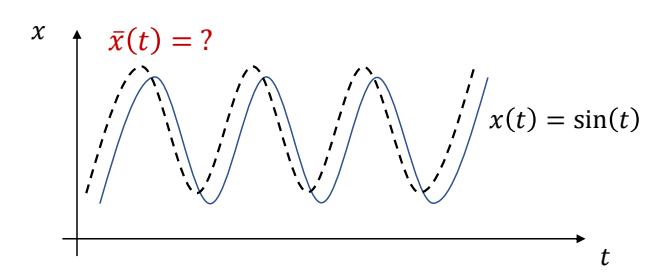
Compute a target trajectory \(\tilde{x}(t)\) such that the simulated trajectory \(x(t)\) is a sine curve.
✅ 目标函数是关于优化对象 \(x_n\) 的二次函数。
$$ \min _{(x_n,v_n,\tilde{x} _n)} \sum _{n=0}^{N} (\sin (t_n)-x_n)^2+\sum _{n=0}^{N}\tilde{x}^2_n $$
✅ 运动学方程中的 \(x_{n+1}\)、\(v_{n+1}\) 与上一帧状态 \(x_n\)、\(v_n\) 是线性关系。
$$ \begin{align*} s.t. \quad \quad v _ {n+1} & = v _ n + h(k _p ( \tilde{x} _ n - x _ n) - k _ dv _ n ) \\ v _ {x+1} & = x _ n + hv _ {n+1} \end{align*} $$
✅ 这是一个典型的 LQR 问题。
P54
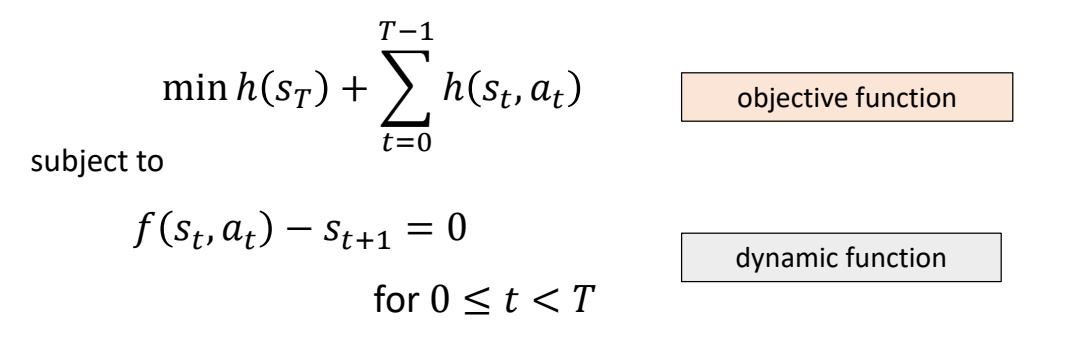
objective function
$$ \min s^T_TQ_Ts_T+\sum_{t=0}^{T} s^T_tQ_ts_t+a^T_tR_ta_t $$
subject to dynamic function
$$ s_{t+1}=A_ts_t+B_ta_t \quad \quad \text{for } 0\le t <T $$
P58
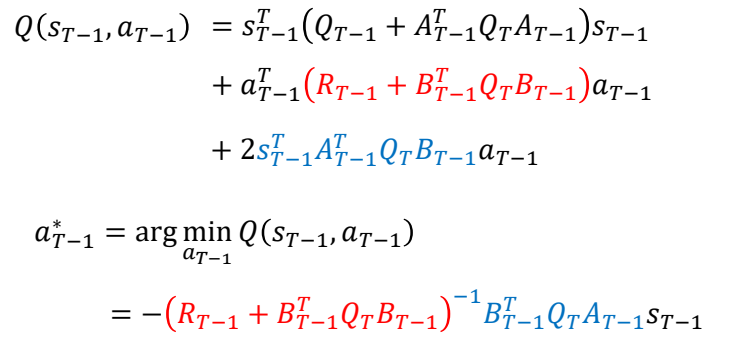
推导一步
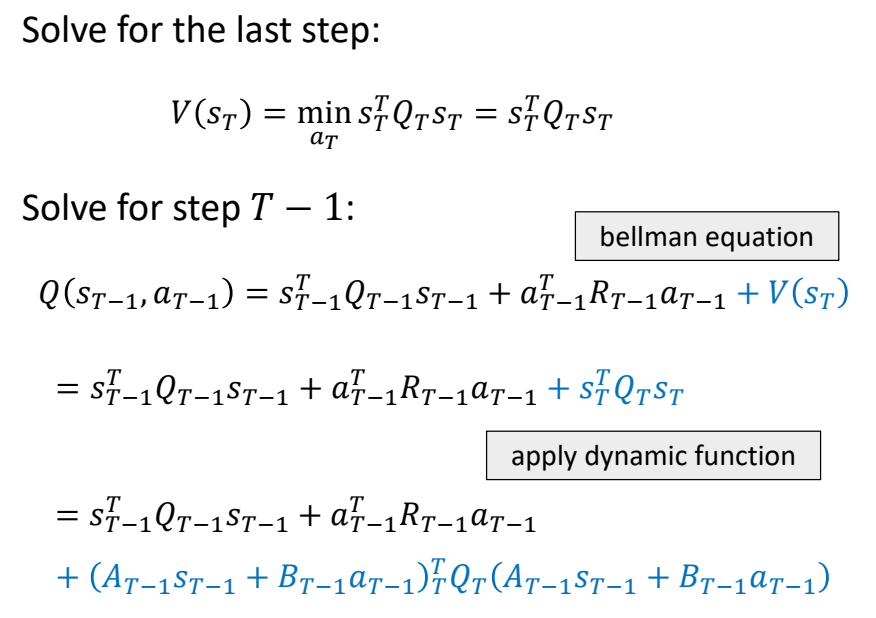
✅ 由于存在optimal substructure,每次只需要考虑下一个状态的最优解。
✅ 每一个状态基于下一个状态来计算,不断往下迭代,直到最后一个状态。
✅ 最后一个状态的V的计算与a无关。
✅ 计算完最后一个,再计算倒数第二个,依次往前推。
P60
公式整理得:
P61
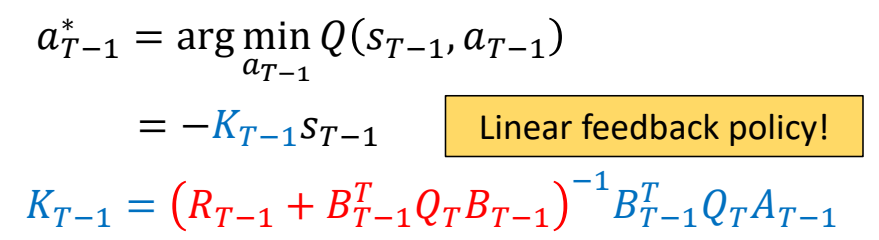
✅ 结论:最优策略与当前状态的关系是矩阵K的关系。\(K\) 是线性反馈系数。
P62
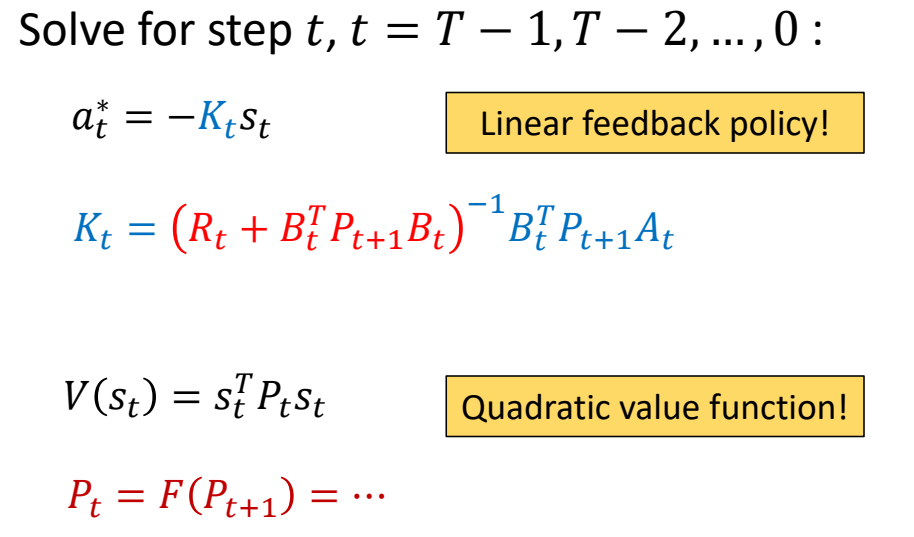
当a取最小值时,求出V:

✅ \(V(S_{T-1})\)和\(V(S_{T})\)的形式基本一致,只是P的表示不同。
P63
推导每一步
P64
Solution
- LQR is a special class of optimal control problems with
- Linear dynamic function
- Quadratic objective function
- Solution of LQR is a linear feedback policy

P65
更复杂的情况
- How to deal with
- Nonlinear dynamic function?
- Non-quadratic objective function?
✅ 人体运动涉及到角度旋转,因此是非线性的。
本文出自CaterpillarStudyGroup,转载请注明出处。
https://caterpillarstudygroup.github.io/GAMES105_mdbook/